详细给出使用T265双目相机实现室内外建模的使用步骤及命令
时间: 2024-03-16 12:42:42 浏览: 151
使用T265双目相机实现室内外建模的步骤和命令如下:
1. 安装SDK
首先,需要从Intel官网下载并安装T265相机的SDK,安装完成后,连接T265相机到电脑上,打开相机。
2. 打开终端
在电脑上打开终端,输入以下命令,开启建模:
```
realsense-viewer
```
3. 打开建模工具
在终端中输入以下命令,打开建模工具:
```
rs-lambda
```
4. 开始建模
在建模工具中点击“Start”按钮,开始建模。
5. 停止建模
建模完成后,点击建模工具中的“Stop”按钮,停止建模。
6. 导出建模结果
在建模工具中,点击“Export”按钮,将建模结果导出为3D模型。可以选择导出为.obj、.stl或者.ply格式的模型。
以上就是使用T265双目相机实现室内外建模的步骤和命令。需要注意的是,建模的效果受到多个因素的影响,包括相机的位置、光线和场景的复杂度等。因此,需要根据具体情况进行调整和优化,才能获得更好的建模效果。
相关问题
T265双目相机可以实现什么功能 并把所能实现的功能的步骤详细的罗列出来
T265双目相机是一种深度学习摄像头,可以实现室内外建图、定位、导航、跟踪等功能。以下是它能够实现的一些功能和步骤:
1. 室内建图:
步骤:
- 使用T265双目相机拍摄室内场景的图像
- 利用T265双目相机提供的深度信息,进行三维建模
- 将建模结果导入到三维软件中,进行进一步处理和编辑
2. 室内导航:
步骤:
- 使用T265双目相机拍摄室内场景的图像
- 利用T265双目相机提供的深度信息,进行定位和导航
- 将导航指令反馈给机器人或者其他智能设备,实现室内导航
3. 室外定位和导航:
步骤:
- 使用T265双目相机拍摄室外场景的图像
- 利用T265双目相机提供的深度信息,进行定位和导航
- 将导航指令反馈给车载设备或者其他智能设备,实现室外导航
4. 目标跟踪:
步骤:
- 使用T265双目相机拍摄目标物体的图像
- 利用T265双目相机提供的深度信息,进行目标跟踪
- 将跟踪结果反馈给机器人或者其他智能设备,实现目标追踪
请给出Arima模型建模详细步骤
当使用ARIMA模型进行时间序列预测时,以下是一些常用的步骤:
1. 导入数据:首先,您需要将时间序列的数据导入MATLAB环境中。确保数据是按照时间顺序排列的,通常使用列向量表示。
2. 数据预处理:对于时间序列预测,通常需要进行一些数据预处理操作,例如平滑化、去除趋势和季节性等。这可以通过MATLAB中的函数来实现,例如detrend()和smoothdata()等。
3. 确定模型阶数:通过观察时间序列的自相关图(ACF)和偏自相关图(PACF),可以确定ARIMA模型的阶数。ACF表示随着时间间隔的增加,观察值之间的相关性如何变化;PACF则测量了当前观察值与之前的观察值之间的相关性。
4. 估计模型参数:使用MATLAB中的arima()函数或者estimate()函数来估计ARIMA模型的参数。根据确定的阶数,您可以选择适当的模型类型(例如ARIMA(p, d, q))并进行参数估计。
5. 模型诊断:对估计得到的模型进行诊断是非常重要的。您可以使用MATLAB中的infer()函数来检查模型残差是否符合正态分布,并且是否存在自相关或异方差性。
6. 模型预测:一旦模型被估计和诊断通过,您可以使用forecast()函数来进行时间序列的预测。该函数可以根据模型和给定的时间窗口大小生成未来的预测值。
请注意,以上步骤只是一般的ARIMA模型建模过程,具体步骤可能会因您的数据和需求而有所不同。在实际应用中,还可能需要对模型进行调参和优化,以获得更好的预测结果。
相关推荐
最新推荐
rapidminer使用手册 [RapidMiner数据分析与挖掘实战] 全17章
流程设计是RapidMiner的核心,它通过一系列操作节点(operators)来实现数据处理和建模。 第三章“数据和结果可视化”阐述了如何利用RapidMiner对数据进行直观的图形展示,这对于理解数据分布和模型性能非常关键。 ...
IC设计流程与使用工具介绍
例如,在算法验证阶段,可以使用C语言或Verilog来对系统算法进行建模,并使用Matlab软件环境进行算法验证。在代码综合阶段,可以使用Synopsys的DC和PC工具来将代码转换为对应的电路映射。 模拟IC设计流程是指使用...
蒸散发数据的处理及空间分析建模的学习
同时,根据需求裁剪出特定区域,例如陕北县级行政区,使用“裁剪”工具完成这一任务。最后,通过“复制栅格”工具生成最终的逐年蒸散发TIFF数据。 在空间分析建模方面,ModelBuilder是一个强大的工具,可以构建...
2019年全国数学建模评审详细要点(A-E题)
全国数学建模竞赛是针对大学生的一项重要比赛,旨在锻炼参赛者的数学应用能力、模型构建技巧以及问题解决策略。本文将详细解析2019年竞赛中的A-E题评审要点,帮助参赛者理解如何构建有效的数学模型,以解决实际问题...
历年全国数学建模试题及解法归纳.doc
为历年的国赛试题,可以借鉴
Ansys Comsol实现力磁耦合仿真及其在电磁无损检测中的应用
资源摘要信息: "Ansys Comsol 力磁耦合仿真详细知识"
标题中提到的“Ansys Comsol 力磁耦合仿真”是指使用Ansys Comsol这一多物理场仿真软件进行力场和磁场之间的耦合分析。力磁耦合是电磁学与力学交叉的领域,在材料科学、工程应用中具有重要意义。仿真可以分为直接耦合和间接耦合两种方式,直接耦合是指力场和磁场的变化同时计算和相互影响,而间接耦合是指先计算一种场的影响,然后将结果作为输入来计算另一种场的变化。
描述中提到的“模拟金属磁记忆检测以及压磁检测等多种电磁无损检测技术磁场分析”是指利用仿真技术模拟和分析在金属磁记忆检测和压磁检测等电磁无损检测技术中产生的磁场。这些技术在工业中用于检测材料内部的缺陷和应力集中。
描述中还提到了“静力学分析,弹塑性残余应力问题,疲劳裂纹扩展,流固耦合分析,磁致伸缩与逆磁致伸缩效应的仿真”,这些都是仿真分析中可以进行的具体内容。静力学分析关注在静态荷载下结构的响应,而弹塑性残余应力问题关注材料在超过弹性极限后的行为。疲劳裂纹扩展研究的是结构在循环载荷作用下的裂纹生长规律。流固耦合分析则是研究流体和固体之间的相互作用,比如流体对固体结构的影响或者固体运动对流体动力学的影响。磁致伸缩与逆磁致伸缩效应描述的是材料在磁场作用下长度或体积的变化,这在传感器和致动器等领域有重要应用。
提到的三个仿真文件名“1_板件力磁耦合.mph”、“2_1_钢板试件.mph”和“管道磁化强度.mph”,意味着这是针对板件、钢板试件和管道的力磁耦合仿真模型文件,分别对应不同的仿真场景和需求。
从标签“程序”来看,本资源适合需要进行程序化仿真分析的工程师或科研人员。这些人员通常需要掌握相关的仿真软件操作、多物理场耦合理论以及相应的工程背景知识。
最后,压缩包子文件中的文件名称列表提供了对上述资源的一些额外线索。例如,“力磁耦合仿真包括直接耦合与.html”可能是一个包含详细说明或者教程的网页文件,“力磁耦合仿真包括直接耦合与间接耦合方式模.txt”和“力磁耦合仿真包括直接耦合与间接耦合方式模.txt”可能是对仿真方法的描述或操作手册的一部分。图片文件(如“3.jpg”、“6.jpg”等)可能提供了仿真过程的视觉演示或结果展示。
为了深入理解和应用这些知识点,可以进一步学习以下几个方面:
1. Ansys Comsol软件的安装、基本操作和高级设置。
2. 力场和磁场分析的理论基础,以及它们在不同材料和结构中的应用。
3. 直接耦合和间接耦合方式在仿真中的具体实现方法和区别。
4. 静力学、弹塑性、疲劳裂纹、流固耦合等分析在仿真中的具体设置和结果解读。
5. 磁致伸缩和逆磁致伸缩效应在仿真中的模拟方法和工程应用。
6. 电磁无损检测技术中磁场分析的实际案例和问题解决策略。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
Java安全API最佳实践:防御CSRF攻击的有效策略
# 1. CSRF攻击的原理和危害
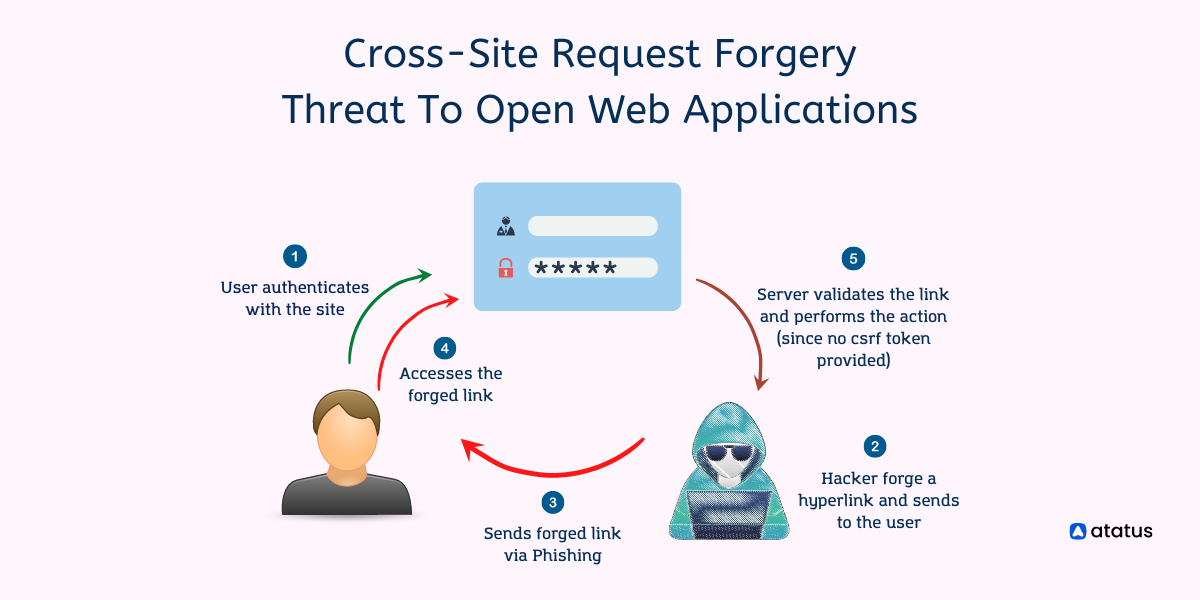
在当今的数字时代,网络安全是每个IT专业人士必须面对的关键问题之一。跨站请求伪造(Cross-Site Request Forgery,CSRF)攻击是一种常见且危害深远的网络安全威胁。CSRF攻击利用了Web应用程序的信任关系和用户会话,通过欺骗用户在已认证的状态下执行非预期的操作,导致数据泄露、非法转账或未经授权的账户配置变更。在本章
html怎么能运行时显示中文
在HTML中动态显示中文,通常需要配合JavaScript或者其他服务器端语言(如PHP、Python等)。这里有两个常见的方法:
1. **纯前端处理**:
- 使用`<meta>`标签设置页面字符集:`<meta charset="UTF-8">`确保浏览器能正确解析中文字符。
- 在文本内容中直接输入中文,例如 `<p>你好,世界!</p>`。
2. **结合JavaScript**:
- JavaScript有内置的字符串函数,如`document.createTextNode()`,可以创建包含中文的DOM元素。
```html
<script>
西门子数控系统调试与配置实战案例教程
资源摘要信息:"西门子828D、840D和808D数控系统是西门子公司生产的一系列先进的数控装置,广泛应用于机械加工领域。本文将详细介绍如何进行这些数控系统的调试、参数配置、梯形图的修改以及如何增加外部输入输出(IO)设备,并且会涉及与第三方设备进行通信的案例。这些知识不仅对维修和调试工程师,对于数控系统的用户也是极其重要的。
1. 数控系统调试
数控系统调试是确保设备正常工作的关键步骤,这通常包括硬件的检查、软件的初始化设置、以及参数的优化配置。在调试过程中,需要检查和确认各个硬件模块(如驱动器、电机等)是否正常工作,并确保软件参数正确设置,以便于数控系统能够准确地执行控制命令。
2. 参数配置
参数配置是针对数控系统特定功能和性能的设置,如轴参数、速度参数、加减速控制等。对于西门子数控系统,通常使用专业的软件工具,如Siemens的Commissioning Tool(调试工具),来输入和修改这些参数。正确的参数配置对于系统运行的稳定性和加工精度都至关重要。
3. 梯形图修改
梯形图是PLC编程中常用的一种图形化编程语言,用于描述和控制逻辑操作。西门子数控系统支持梯形图编程,工程师可以根据实际需求对系统中已有的梯形图进行修改或添加新的逻辑控制。这对于实现复杂的加工任务和提高生产效率非常重要。
4. 增加外部IO
外部输入输出(IO)扩展对于需要更多控制信号和反馈信号的复杂加工任务来说是必须的。增加外部IO设备可以扩展数控系统的控制能力,使得系统能够接收到更多的传感器信号,并对外部设备进行更精准的控制。
5. 与第三方设备通讯
在现代制造环境中,数控系统通常需要与其他设备如机器人、测量设备或物料输送系统进行数据交换和协调工作。因此,了解如何配置和调试与第三方设备的通讯是至关重要的。这通常涉及到通信协议(如PROFIBUS、PROFINET或以太网通讯)的设置以及相应软件的配置。
在本文档中,还附带有程序、软件和说明书等资源,这些资源对于实际操作将提供直接的帮助。软件工具可能包括用于编程和调试的专用软件,而说明书则为操作者提供了详细的步骤说明和理论解释,以帮助用户更好地理解和使用这些数控系统。
考虑到文档的文件名称列表,可以推断文档中包含以下内容:
- 西门子数控系统.html:这可能是一个包含上述内容的详细介绍的网页文档。
- 图片文件(1.jpg、2.jpg、3.jpg):这些可能是调试和配置过程中使用的操作界面截图或者示意图。
- 西门子数控系统调试参数配.txt等文本文件:这些文件可能包含了具体调试参数配置的说明或者示例数据。"
在实际工作中,掌握这些知识点对于操作和维护西门子数控系统至关重要,不仅可以提高工作效率,还可以在遇到问题时进行快速定位和解决。无论是对于初学者还是有经验的操作者,这些资源都将是非常宝贵的参考资料。