【CANape新手必读】:7个步骤带你快速入门CAN报文处理
发布时间: 2024-11-29 16:08:24 阅读量: 5 订阅数: 9 

参考资源链接:[CANape中收发CAN报文指南](https://wenku.csdn.net/doc/6412b73dbe7fbd1778d49963?spm=1055.2635.3001.10343)
# 1. CAN协议简介与报文基础
## 1.1 CAN协议背景与特点
控制器局域网络(CAN)协议由德国博世公司在20世纪80年代初期开发,广泛应用于汽车和工业自动化领域。它支持多主结构,允许在同一网络中存在多个控制单元。CAN协议的特点包括其非破坏性的仲裁机制,确保网络中最高优先级的消息能被及时传递,以及容错性高和错误检测能力强,使其成为实时控制系统中的一项重要技术。
## 1.2 CAN报文结构
CAN报文由标识符、控制场、数据场和校验场组成。其中,标识符决定了消息的优先级。CAN协议支持两种报文格式:标准格式(11位标识符)和扩展格式(29位标识符)。数据场长度可变,最多支持8字节。报文的识别主要依靠标识符,而数据场则包含了传输的数据内容。
## 1.3 CAN报文通信过程
在CAN网络中,每个控制单元都能够发送和接收报文。当总线空闲时,任何控制单元都可以开始发送报文。如果两个或多个控制单元几乎同时开始发送报文,则会通过仲裁过程,基于标识符的优先级来决定哪个报文将被继续传输。此机制确保了网络上不会发生数据冲突,并且高优先级的报文可以被优先处理。
总结来说,本章介绍了CAN协议的起源、基本特点以及报文的基本结构和通信过程,为进一步深入探讨CAN报文捕获、分析和模拟打下了基础。
# 2. CANape软件安装与界面布局
安装任何软件工具都要求用户对安装过程中的细节有充分了解,以确保软件能够正确安装并运行。而正确掌握软件界面布局,是进行高效工作和操作的前提。本章将带领读者细致了解如何安装CANape软件,并详细介绍软件的界面布局。
## 2.1 软件安装步骤
### 2.1.1 系统要求检查
安装CANape之前,用户需要确认计算机满足软件的系统要求,包括操作系统版本、处理器速度、内存大小以及硬盘空间等。此外,还需要检查是否有兼容的CAN硬件接口设备。
### 2.1.2 下载与安装
接下来,用户需要从Vector官网下载CANape安装包。下载完成后,按照如下步骤进行安装:
```bash
# 下载CANape安装包
wget [下载链接]
# 解压安装包
tar -xvzf canape-installation.tar.gz
# 运行安装脚本
sudo ./canape-install.sh
```
安装过程中,用户需要接受许可协议,选择安装路径,并根据需要选择额外的组件。
### 2.1.3 驱动安装与硬件测试
安装完成后,用户需要根据CAN接口硬件的型号安装相应的驱动程序,并通过简单的测试验证硬件与CANape软件是否能够正常通信。
## 2.2 界面布局介绍
### 2.2.1 主窗口
CANape的主窗口是进行日常工作的重要界面。它主要由多个区域组成,包括菜单栏、工具栏、配置树、信息显示区等。
### 2.2.2 配置树
配置树是一个层次结构的列表,显示了与项目相关的所有配置。用户可以在此浏览和管理项目文件、数据库、测量配置等。
```mermaid
graph TB
ConfigTree[配置树] -->|展开| ProjectFile[项目文件]
ConfigTree -->|展开| Database[数据库]
ConfigTree -->|展开| Measurement[测量配置]
ProjectFile -->|双击打开| Editor[编辑器]
Database -->|双击打开| DBEditor[数据库编辑器]
Measurement -->|双击打开| MeasurementConfig[测量配置界面]
```
### 2.2.3 工具栏
工具栏提供了一系列快捷操作,使得用户能够快速访问常用功能。它包含了诸如启动测量、停止测量、保存文件等快捷按钮。
### 2.2.4 信息显示区
信息显示区通常包含状态栏和消息栏,用于实时显示软件操作的状态信息、警告、错误信息等。
## 2.3 自定义界面布局
为了提高工作效率,用户可以根据个人喜好和操作习惯来自定义CANape界面布局。
### 2.3.1 窗口自定义
用户可以通过拖拽的方式对窗口进行重排,并且可以保存自定义的窗口布局以备后用。
```xml
<!-- 示例配置文件,保存窗口布局 -->
<Layout>
<Window name="MeasurementControl" x="10" y="10" width="200" height="200"/>
<Window name="ConfigurationTree" x="220" y="10" width="200" height="200"/>
</Layout>
```
### 2.3.2 快捷键设置
用户还可以设置快捷键以加速执行常用命令。
### 2.3.3 布局保存与加载
最后,用户可以将自定义的布局保存到项目文件中,并在需要时加载。
## 2.4 总结
正确安装CANape软件以及熟悉其界面布局对于任何进行车载网络通信分析的工程师来说都是基础且至关重要的一步。本章我们详细探讨了软件安装的必要条件、具体步骤,以及如何自定义界面布局以提升工作效率。接下来的章节将深入介绍如何使用CANape进行CAN报文的捕获和分析。
# 3. CAN报文捕获与分析
## 3.1 配置CAN接口
### 3.1.1 硬件接口的选择与设置
CAN协议作为ISO 11898标准,广泛应用于各种汽车和工业网络中,要求相应的硬件接口支持这些标准。在进行CAN报文捕获和分析之前,正确选择和设置硬件接口至关重要。
首先,需要考虑所使用的接口设备。常见的设备包括USB接口的CAN分析器、PCMCIA接口卡、PCI Express接口卡等。在选择硬件时,应考虑以下因素:
- 兼容性:确保该设备支持所使用的操作系统,比如Windows或Linux。
- 传输速率:根据实际需要,选择支持不同传输速率(如1Mbit/s、500kbit/s)的设备。
- CAN标准:确保设备支持CAN 2.0A和CAN 2.0B标准,以及ISO 11898-1到-6的所有版本。
- 扩展性:如果未来有更多需求,考虑接口设备是否支持扩展模块。
配置硬件接口时,通常需要执行以下步骤:
1. 将CAN接口设备插入计算机。
2. 根据设备说明安装相应的驱动程序。
3. 在操作系统中确认设备已经正确识别。
4. 配置硬件参数,如传输速率、通道类型(高/低速CAN)以及网络终端。
### 3.1.2 软件中接口参数的配置
在CANape等软件中配置接口参数是捕获和分析CAN报文的关键步骤。这包括设置网络参数和通道配置,以确保软件能够正确地与硬件接口进行通信。
在CANape中进行接口参数设置的步骤通常包括:
1. 打开CANape软件,创建或打开一个项目。
2. 在"System Explorer"中找到"Measurement Setup"部分。
3. 在"Measurement Setup"中选择"Configuration",然后选择"CAN Interface"。
4. 选择正确的硬件接口设备。
5. 进入接口设置界面,配置网络参数,例如CAN ID过滤、传输速率、位定时参数等。
6. 如果需要,设置通道参数,以区分不同网络的通信。
7. 完成设置后,保存并激活配置,确保软件与硬件同步。
## 3.2 捕获CAN报文
### 3.2.1 基本捕获设置
在CANape软件中,基本捕获设置相对直观,用户只需要通过图形化界面进行一些简单配置即可开始捕获CAN报文。这个阶段的设置包括定义捕获范围、捕获模式和触发条件。
首先,在CANape的"Measurement Setup"中找到并点击"Message Settings"。然后执行以下操作:
- 选择捕获范围。用户可以指定捕获所有通过接口的报文,或者根据ID过滤特定报文。
- 设置捕获模式。可以选择"Normal"模式下连续捕获,或"Triggered"模式下基于特定事件捕获。
- 定义触发条件。如果使用触发模式,则需要设置触发条件,比如特定ID或数据模式。
### 3.2.2 过滤器的使用与高级捕获技巧
除了基本捕获设置,CANape还提供了强大的过滤器功能,允许用户根据更复杂的条件捕获报文。使用过滤器可以大大减少捕获数据的量,提高分析效率。
高级捕获技巧包括:
- 逻辑过滤。使用逻辑运算符(AND、OR、NOT)组合多个过滤条件。
- 位级过滤。可以过滤出含有特定字节和位值的报文。
- 事件触发。设置基于时间或报文内容变化的触发条件。
在CANape中设置过滤器的步骤:
- 在"Measurement Setup"中找到"Filter Settings"。
- 添加过滤规则,输入条件,如ID、数据内容或特定位的值。
- 调整过滤规则的优先级,确保正确执行。
- 应用过滤设置,并开始捕获。
## 3.3 分析CAN报文
### 3.3.1 报文解码与信号解析
报文解码是将捕获的CAN报文转换成可读形式的过程。CANape软件提供了内置的解码库,可以自动将报文ID和数据字段转换成车辆网络中定义的信号。
报文解码步骤如下:
- 在CANape的"Measurement Setup"中找到"Message Decoding"选项。
- 选择或创建一个解码库,确保它包含了你感兴趣的报文类型。
- 在解码库中,定义每个报文的解码规则,如ID映射、数据格式和信号名。
- 应用解码规则,将捕获的原始报文解码成信号值。
- 在"Measurement"视图中查看解码后的信号,可以是单独报文的解码或按时间序列的图形化表示。
### 3.3.2 报文的图形化显示与统计分析
图形化显示功能能够提供直观的视觉分析,而统计分析则有助于发现数据中的趋势和异常。
使用CANape进行图形化显示和统计分析的基本步骤:
- 在"Measurement"视图中,选择要分析的信号。
- 使用"Graph"工具或"Table"视图来可视化信号值的变化。
- 使用"Statistics"工具箱进行信号的统计分析,如平均值、最大值、最小值和标准差。
- 利用"Signal Analysis"功能设置阈值和极限,帮助识别超出预设范围的数据。
- 运行分析并查看结果,进行数据评估。
这一系列的操作使得CAN报文捕获与分析变得简洁而高效,能够满足不同层次的分析需求,从基本的诊断到深入的网络性能分析。在实际的车载网络应用中,熟练运用这些工具和方法可以显著提升工作效率和数据处理质量。
# 4. CAN报文的模拟与发送
随着汽车行业对车辆网络系统的需求不断增长,对CAN报文的模拟与发送变得至关重要。第四章主要介绍如何在CANape软件中进行模拟消息的创建以及CAN报文的发送,并详细阐述了模拟与发送过程中的关键步骤和技巧。
## 4.1 创建模拟消息
创建模拟消息是验证ECU(电子控制单元)或车辆网络的关键步骤。模拟消息能够以编程方式生成CAN报文,这对于测试、分析和调试车辆网络非常有用。
### 4.1.1 消息的定义与周期性发送
在CANape中定义模拟消息时,需要指定ID、数据长度和数据内容。例如,一条发送发动机转速信息的消息可能具有特定的ID和表示转速的数据字段。
定义消息后,可以通过设置周期性发送来模拟实际运行环境中的连续数据流。周期发送的设置选项允许用户指定发送间隔时间,这与真实车辆中ECU的工作节奏相吻合。
```
// 伪代码示例:周期性发送消息
function startPeriodicMessageTransmission(messageID, period):
while(true):
sendMessage(messageID, calculateMessageData())
sleep(period)
```
### 4.1.2 随机消息模拟与触发条件设置
在现实场景中,并不是所有消息都是周期性出现的。某些情况下,消息的发送依赖于特定的触发条件。因此,模拟消息时同样需要支持随机性或基于触发条件的发送。
在CANape中,可以设置消息在满足某些条件时才发送,比如车速超过某个值或者某个传感器信号改变时。这可以通过编写脚本或配置特定触发条件来实现。
```
// 伪代码示例:基于触发条件的消息发送
function sendOnTrigger(messageID, triggerCondition):
if evaluateTriggerCondition(triggerCondition):
sendMessage(messageID, calculateMessageData())
```
## 4.2 发送CAN报文
在模拟消息创建好之后,下一步是发送CAN报文。这涉及到确定发送参数和条件以及利用CANape提供的高级发送特性。
### 4.2.1 确定发送参数与条件
发送CAN报文时,必须明确指定发送的参数,包括报文ID、数据长度、数据内容以及发送时间等。CANape软件允许用户为每个报文设置精确的发送时间点,或者将发送设置为循环模式,以及在满足特定条件时触发发送。
### 4.2.2 高级发送特性与限制
除了常规的发送功能,CANape还提供了高级发送特性,比如发送序列化报文(对一系列报文进行顺序发送),以及报文发送的优先级设置等。这些特性可以用来模拟更接近真实场景的数据流。
需要注意的是,发送报文时需要考虑网络的带宽和接收器的能力限制。在设计报文发送测试时,应确保测试场景不会超出网络的处理能力。
```
// 伪代码示例:设置报文发送优先级
function setMessagePriority(messageID, priority):
// 优先级参数的逻辑处理
```
通过精确配置和执行这些高级发送特性,工程师能够创建详尽的测试案例,确保ECU和车辆网络在各种条件下都能正常工作。
### 4.2.3 验证发送功能的案例
为了更好地说明上述概念,下面提供一个基于实际操作的案例:
假设需要在车辆启动时发送一系列状态消息以模拟启动后的车辆网络活动。
1. 首先,定义所有需要发送的消息,并根据实际车辆的启动逻辑设置它们的发送条件和优先级。
2. 使用CANape的脚本功能编写启动序列,当模拟的车辆启动信号触发时,发送序列开始执行。
3. 监控和记录网络上的消息传输,确保消息按预期顺序发送,而且不会造成网络拥堵。
通过这个案例,我们展示了如何在CANape中设置复杂的报文发送序列,并验证其在特定条件下的功能。
在下一章节,我们将深入探讨CANape在车辆网络系统中的具体应用案例,包括车辆诊断功能实现、实时数据监控与记录、以及控制策略的实现与验证。
# 5. CANape在车辆网络系统中的应用案例
## 5.1 车辆诊断功能实现
在现代车辆网络系统中,车辆诊断功能是维护和故障排查的重要手段。CANape软件可以与车辆的OBD-II接口进行通信,实现故障码的读取和清除。
### 5.1.1 OBD-II接口的诊断通信
OBD-II接口,即On-Board Diagnostics II接口,是目前车辆中常见的诊断接口。为了与OBD-II接口建立通信,用户需要连接相应的硬件接口设备,如USB转CAN适配器,并正确设置CANape的硬件接口参数。
```markdown
- 确保适配器的驱动程序已安装,并且连接到计算机。
- 启动CANape,点击“硬件”选项卡,选择对应的适配器,并设置波特率等参数。
- 通过“诊断”菜单打开OBD-II通信窗口。
```
连接并配置好设备后,用户可以发送诊断请求命令,并接收来自车辆的诊断响应信息。
### 5.1.2 故障码的读取与清除
故障码(Fault Codes, DTCs)是车辆电子控制单元(Engine Control Unit, ECU)中存储的关于系统或部件故障的信息。使用CANape可以方便地读取和清除这些故障码。
```markdown
- 在诊断窗口中,选择“读取故障码”选项。
- CANape将向车辆发送请求,并列出所有存储的故障码。
- 若要清除故障码,选择“清除故障码”,然后确认操作。
```
此功能对于维修人员快速定位问题,进行车辆维护非常有用。
## 5.2 实时数据监控与记录
实时监控车辆网络系统中数据对于分析车辆行为、评估车辆性能非常关键。CANape提供了强大的数据监控与记录功能。
### 5.2.1 实时监控的设置与显示
为了监控车辆网络中的实时数据,用户需要首先设置数据监控界面,之后才能进行实时显示。
```markdown
- 在CANape中,打开“测量”菜单并选择“创建显示窗口”。
- 通过拖放信号至显示窗口中,设置显示参数,如单位、上下限等。
- 启动车辆并开启数据监控,实时数据会以图表、数字等形式展示。
```
该功能支持多种数据显示方式,包括数字显示、柱状图、趋势图等,用户可以根据需要进行选择。
### 5.2.2 长时间数据记录与回放分析
长时间记录车辆运行数据对于事后分析、故障排查及性能评估非常重要。CANape提供了长时间数据记录功能,支持数据的回放分析。
```markdown
- 打开“测量”菜单,选择“配置记录”选项,设置记录的起止时间和条件。
- 启动记录功能后,软件会按照设置参数记录数据。
- 记录完成后,在CANape中加载记录文件,用户可以对记录数据进行回放和分析。
```
数据回放功能允许用户以不同的时间点或时间间隔查看数据,帮助技术人员重现问题发生时的车辆状态。
## 5.3 控制策略的实现与验证
车辆的控制策略通常由ECU中的软件算法决定,而验证控制策略的有效性则是开发过程中的关键步骤。CANape可以实现控制命令的发送,并监视ECU的反馈。
### 5.3.1 控制命令的发送与反馈
为了测试和验证控制策略,工程师需要对ECU发送控制命令,并观察其反馈。
```markdown
- 在CANape中,打开“控制”菜单,选择“发送控制命令”。
- 设定所需的控制参数,如开关状态、数值等,并发送命令。
- 监控反馈信号,验证命令是否正确执行。
```
该过程可以与记录功能结合使用,帮助工程师详细分析控制策略的效果。
### 5.3.2 控制策略的调试与验证步骤
调试和验证控制策略需要一系列的步骤和细致的操作,以确保策略在各种运行条件下均能正常工作。
```markdown
- 确定测试的控制策略和关键参数。
- 在CANape中配置模拟和发送设置,以及相应的监控和记录设置。
- 运行车辆,执行控制策略,并实时监控关键信号。
- 记录测试数据,进行数据回放分析。
- 根据反馈调整控制策略,重复测试直到满足设计要求。
```
通过上述步骤,开发人员可以确保控制策略的准确性和车辆系统的可靠性。
通过CANape的这些应用案例,可以看到它是如何在车辆网络系统中实现各种功能的,无论是用于故障诊断、数据监控,还是控制策略的调试和验证,CANape都是一个功能强大的工具,能够帮助工程师提高工作效率,确保车辆系统的稳定性和可靠性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【多语言应用国际化的秘诀】:Fluent中文帮助文档策略解析
参考资源链接:[ANSYS Fluent中文帮助文档:全面指南(1-28章)](https://wenku.csdn.net/doc/6461921a543f8444889366dc?spm=1055.2635.3001.10343)
# 1. 多语言应用国际化的重要性
在全球化的数字时代,多语言应用的国际化变得至关重要。随着信息技术的迅猛发展,企业开始寻求更广阔的市场
日立电子扫描电镜的电子光学系统详解:彻底了解原理与操作
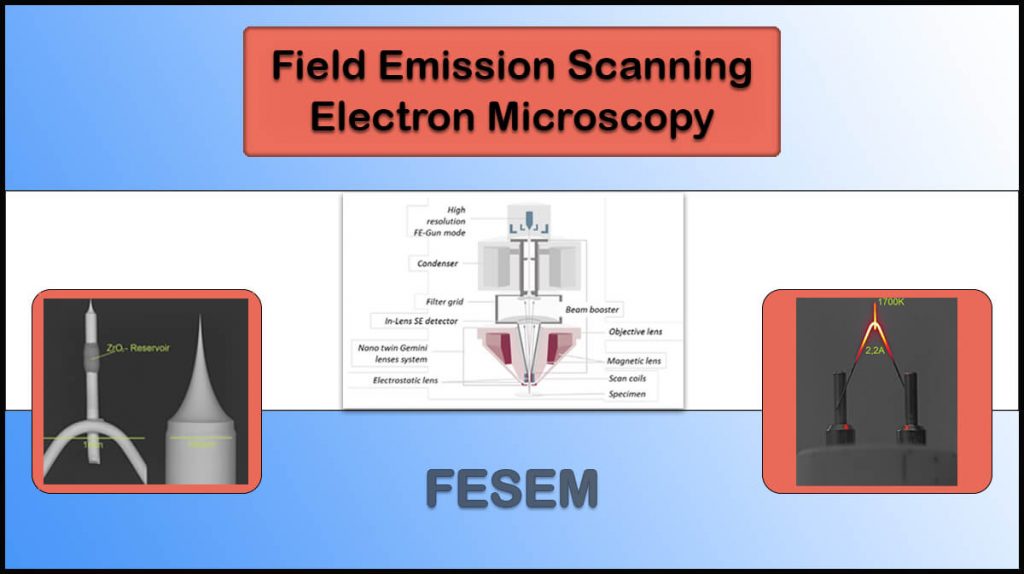
参考资源链接:[日立电子扫描电镜操作指南:V23版](https://wenku.csdn.net/doc/6412b712be7fbd1778d48fb7?spm=1055.2635.3001.10343)
# 1. 日立电子扫描电镜概述
日立电子扫描电镜(Scanning Electron Microscope, SEM)是利用聚焦的高能电子束扫描样品表面,以获得样品表面形貌和成分信息的仪器。它具有卓越的分辨率,可以达到纳米级别的成像,因此在
模块化开发:AutoHotkey构建可复用代码块的最佳实践
参考资源链接:[AutoHotkey 1.1.30.01中文版教程与更新一览](https://wenku.csdn.net/doc/6469aeb1543f844488c1a7ea?spm=1055.2635.3001.10343)
# 1. 模块化开发的基本概念
在现代软件开发领域,模块化开发已经成为提高代码质量、提升开发效率和便于维护的关键实践之一。
【Symbol LS2208无线通信优化指南】:提高无线扫描枪性能的秘诀
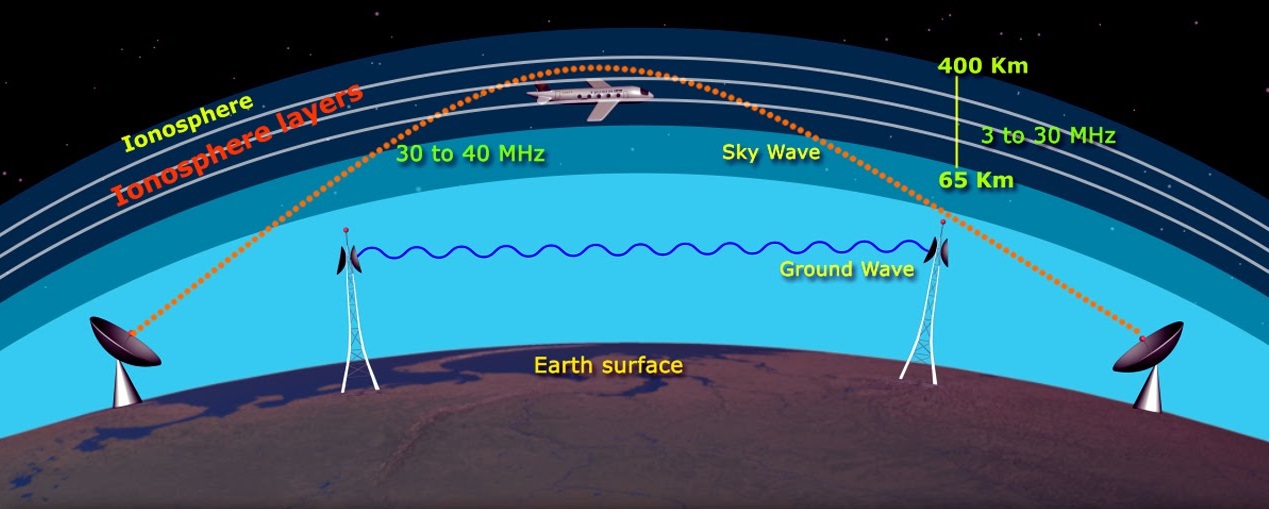
参考资源链接:[Symbol LS2208扫描枪设置详解与常见问题解决方案](https://wenku.csdn.net/doc/6412b67ebe7fbd1778d46ec5?spm=1055.2635.3001.10343)
# 1. 无线通信基础与无线扫描枪概述
## 1.1 无线通信的演化
无线通信技术自20世纪初开始发展以来,已经历了从简单的无线电报到当前的4G、5G网络的巨大飞跃。每一阶段的变革都是基于更高频段、更先进调
【环境科学中的fsolve应用】:模拟与预测环境变化的数学模型

参考资源链接:[MATLAB fsolve函数详解:求解非线性方程组](https://wenku.csdn.net/doc/6471b
阿里巴巴Java多线程与并发控制:规范引导下的性能优化与问题解决
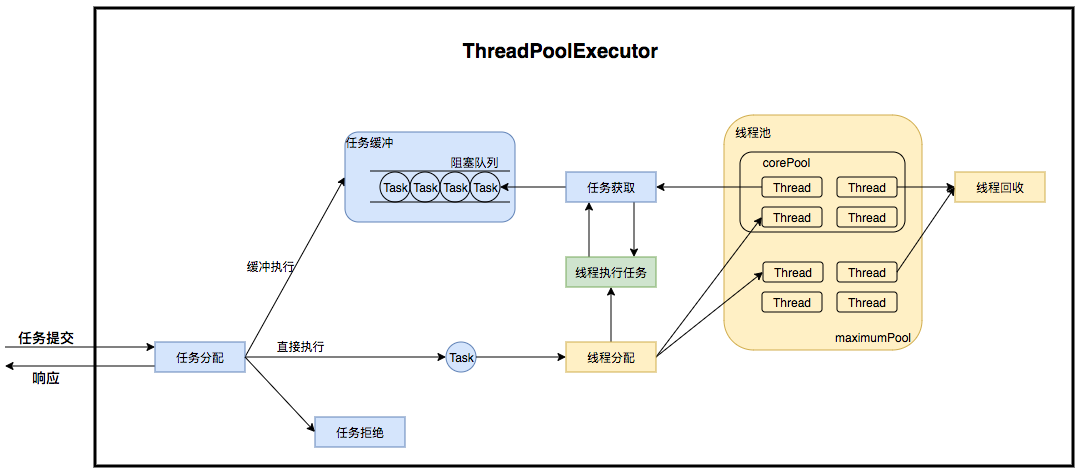
参考资源链接:[阿里巴巴Java编程规范详解](https://wenku.csdn.net/doc/646dbdf9543f844488d81454?spm=1055.2635.3001.10343)
# 1. Java多线程基础和并发模型
Java多线程编程是构建高效、可伸缩应用程序的关键技术之一。在本章中,我们将探索Java多线程的基础知识和并发模型的原理,为深入理解后续章节的高级概念打下坚实的基础。
## 1.1 Java多线程基础
74LS90与可编程逻辑设备的比较分析:优势、局限及选择指南

参考资源链接:[74LS90引脚功能及真值表](https://wenku.csdn.net/doc/64706418d12cbe7ec3fa9083?spm=1055.2635.3001.10343)
# 1. 74LS90与可编程逻辑设备基础
在数字电子设计领域,理解基本组件和可编程逻辑设备的概念是至关重要的。本章旨在为读者提供74LS90这种固定功
【Vcomputer存储软件高级配置技巧】:提升存储效率的7大秘密武器
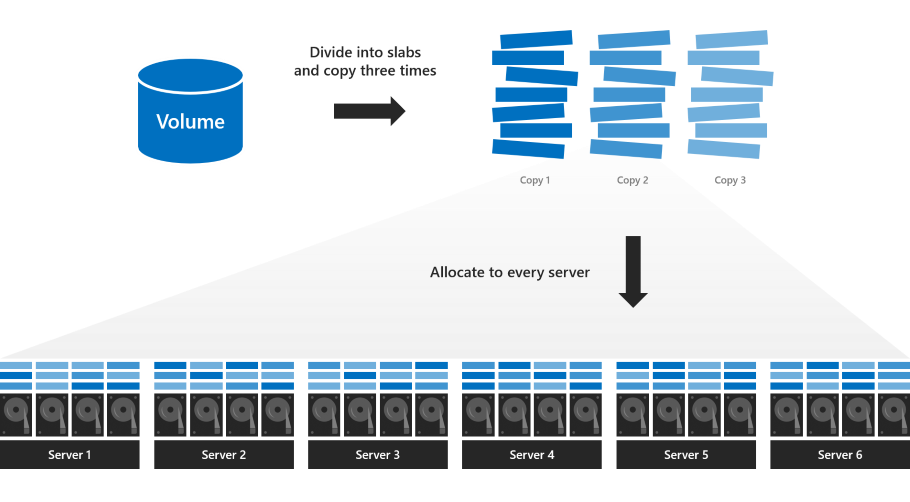
参考资源链接:[桂林电子科大计算机教学辅助软件:Vcomputer软件包](https://wenku.csdn.net/doc/7gix61gm88?spm=1055.2635.3001.10343)
# 1. Vcomputer存储软件概述
随着信息技术的不
SENT vs CAN协议:汽车通信网络中最佳选择与集成指南
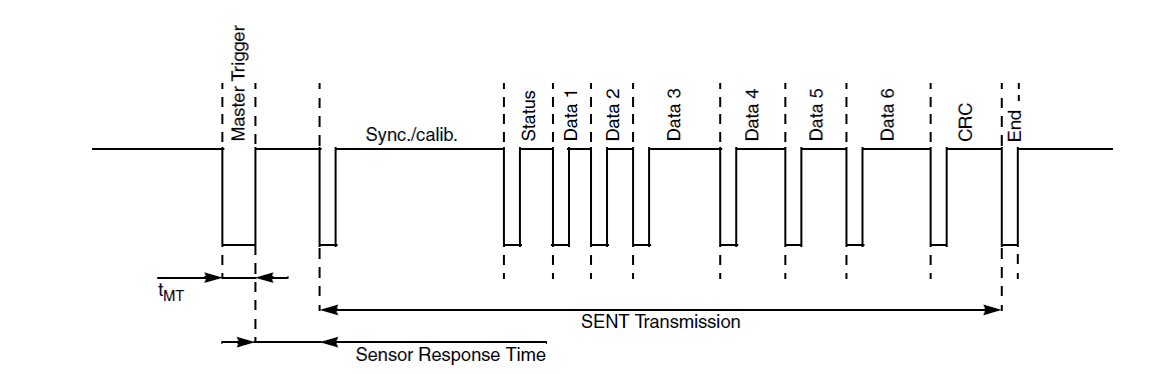
参考资源链接:[SAE J2716_201604 (SENT协议).pdf](https://wenku.csdn.net/doc/6412b704be7fbd1778d48caf?spm=1055.2635.3001.10343)
# 1. 汽车通信网络协议概述
汽车通信网络协议是现代汽车电子系统运作的基础。随着汽车技术的不断进步,各种传感器、执行器、控制单元
【外围设备集成】:ESP32最小系统外围设备集成与扩展性探讨

参考资源链接:[ESP32 最小系统原理图.pdf](https://wenku.csdn.net/doc/6401abbbcce7214c316e94cc?spm=1055.2635.3001.10343)
# 1. ESP32概述与最小系统构成
ES
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )