PyTorch图像分类:性能优化必备的5个实用技巧
发布时间: 2024-12-11 19:38:51 阅读量: 4 订阅数: 4 

pytorch图像分类:模型包括(VGG、alexnet、googlenet、resnet,densenet,mobilenet

# 1. PyTorch图像分类简介
PyTorch是一个由Facebook开发的开源机器学习库,它在计算机视觉和自然语言处理领域取得了巨大成功。图像分类是深度学习中的一个基础任务,其目标是将图像分配给一个特定的类别。在本章中,我们将简要介绍图像分类的重要性和使用PyTorch框架进行图像分类的基本概念。
## 1.1 图像分类的重要性
图像分类在许多实际应用场景中扮演着关键角色,比如在医疗领域中识别病变组织,在自动驾驶车辆中识别道路标志和行人,以及在社交媒体中自动标注用户上传的图片。随着深度学习技术的发展,图像分类的准确率得到了显著提升,使得这些应用变得更加实用和普及。
## 1.2 PyTorch的优势
PyTorch作为一种动态计算图框架,与TensorFlow等其他深度学习框架相比,其提供了更为灵活和直观的接口。PyTorch易于上手,同时它也是科研和工程实践中的首选工具之一。其动态图的设计允许在运行时更自由地修改模型结构,使得研究者可以快速实现和测试新的算法思想。
## 1.3 PyTorch图像分类的入门步骤
为了开展PyTorch图像分类项目,首先需要安装PyTorch及其相关的库,如 torchvision。之后,学习者可以按照以下步骤进行入门:
1. **数据加载**:使用torchvision库来加载和转换标准数据集,如CIFAR-10或ImageNet。
2. **模型构建**:利用PyTorch的Module类来定义自己的网络架构。
3. **训练循环**:编写训练循环,包括前向传播、计算损失、执行反向传播以及更新模型权重。
4. **评估与测试**:在验证集和测试集上评估模型的性能,调整超参数以优化结果。
这些步骤是图像分类任务的典型流程,接下来的章节中我们将深入探讨每一个环节,学习如何进一步提高模型的准确率和效率。
# 2. 深度学习的基础知识
深度学习是机器学习的一个子集,它通过模仿人脑的神经网络结构来进行信息处理和学习。它使得计算机能够通过数据学习复杂的模式和特征,广泛应用于图像识别、语音识别、自然语言处理等领域。
### 神经网络的基本组成
神经网络由一系列的节点(称为神经元)和连接(称为边)组成。每个神经元接收输入、执行计算,并产生输出。神经网络中主要有三种类型的层:
- 输入层:接收原始数据。
- 隐藏层:进行特征提取和变换。
- 输出层:产生最终的预测结果。
每层之间的连接代表了数据流,连接的权重决定了输入信号的重要性。在神经网络的学习过程中,这些权重会被优化以减少预测误差。
### 卷积神经网络(CNN)结构原理
卷积神经网络是深度学习中用于处理图像数据的特殊类型的神经网络。CNN通过使用卷积层来自动学习图像的空间层级特征。卷积层由多个可学习的滤波器(或称为卷积核)组成,这些滤波器可以捕捉图像中的局部特征,如边缘、角点和纹理。
卷积操作通过对图像进行滑动窗口操作并计算滤波器与窗口内容的点积来实现。这种操作具有平移不变性,使得网络对图像的位置变化不敏感。
CNN通常包含以下几种类型的层:
- 卷积层(Convolutional layers):负责特征检测。
- 池化层(Pooling layers):降低特征维度,提升模型泛化能力。
- 全连接层(Fully connected layers):用于决策和分类。
- 激活层(Activation layers):如ReLU或Sigmoid,引入非线性,使模型能够学习复杂的函数。
下面是一个简单的CNN架构实例代码,展示了如何在PyTorch中定义一个基本的卷积神经网络结构:
```python
import torch
import torch.nn as nn
class SimpleCNN(nn.Module):
def __init__(self):
super(SimpleCNN, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, padding=1)
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.fc = nn.Linear(64 * 8 * 8, 10) # 10 classes
def forward(self, x):
x = self.pool(torch.relu(self.conv1(x)))
x = self.pool(torch.relu(self.conv2(x)))
x = x.view(-1, 64 * 8 * 8) # Flatten the tensor for the fully connected layer
x = self.fc(x)
return x
# 实例化模型
model = SimpleCNN()
```
在上述代码中,我们首先定义了一个继承自`nn.Module`的类`SimpleCNN`,其中包含了两个卷积层`conv1`和`conv2`,以及一个池化层`pool`和一个全连接层`fc`。在`forward`方法中,我们按照数据流向定义了网络层的顺序。注意,在将数据传递给全连接层之前,使用`view`方法来调整数据的形状,以确保它符合全连接层的期望输入形状。这种模式是构建简单CNN模型的典型做法。
# 3. PyTorch图像分类性能优化技巧
在深度学习领域,图像分类任务是一个基础且关键的应用。为了实现高效、精确的图像分类模型,不仅需要合理的模型设计,还需要对训练过程和模型结构进行优化。本章将深入探讨如何通过多种策略来提升PyTorch模型的性能,包括模型优化策略、训练加速技术以及模型压缩与加速手段。
## 3.1 模型优化策略
提高模型性能的第一步是优化模型本身。这涉及到选择合适的权重初始化方法和利用网络架构搜索技术来改进模型的结构。
### 3.1.1 权重初始化方法
权重初始化是构建神经网络模型时的关键步骤之一。初始化方法的好坏直接影响模型的收敛速度和最终性能。常用的初始化方法包括Xavier初始化、He初始化等。
Xavier初始化(也称为Glorot初始化)是一种常用的权重初始化方法,目的是保持每层输入和输出方差一致,有助于解决深层神经网络中的梯度消失问题。其核心思想是在正向传播时保持信号的方差,在反向传播时保持梯度的方差。
He初始化是针对ReLU激活函数提出的,与Xavier初始化类似,但是初始化权重的标准差是基于神经元数量的。对于使用ReLU激活函数的网络,He初始化通常会比Xavier初始化表现得更好。
```python
import torch.nn as nn
import torch.nn.init as init
def xavier_init(model):
for name, param in model.named_parameters():
if 'weight' in name:
init.xavier_uniform_(param.data)
def he_init(model):
for name, param in model.named_parameters():
if 'weight' in name:
init.kaiming_uniform_(param.data, a=0, mode='fan_in', nonlinearity='relu')
```
在上述代码中,`xavier_init`函数和`he_init`函数分别实现了Xavier初始化和He初始化。当构建自己的模型时,可以遍历模型的所有参数,并对权重参数使用相应的初始化方法。
### 3.1.2 网络架构搜索技术
近年来,网络架构搜索(NAS, Neural Architecture Search)技术成为研究热点。NAS的目的是自动化地设计出性能优越的网络结构,其核心在于如何在大量候选的架构中寻找最优解。
NAS通常分为强化学习方法、进化算法和基于梯度的优化方法。这些方法各自有不同的优缺点,但目标都是在庞大的网络搜索空间中找到最优的网络架构。
NAS搜索得到的模型,往往具有更优的性能和更少的参数量,但NAS的计算成本通常非常高。因此,如何平衡搜索成本和模型性能,是NAS技术面临的一个重要挑战。
## 3.2 训练加速技术
训练加速技术包括批量归一化、梯度累积、并行计算和混合精度训练等方法,目的是缩短模型训练时间,同时保持模型性能。
### 3.2.1 批量归一化与梯度累积
批量归一化(Batch Normalization, BN)是一种在深度神经网络训练过程中对每层的输入进行归一化的技术。其主要作用是缓解内部协变量偏移(Internal Covariate Shift),从而加速模型训练过程。
批量归一化通过标准化操作,将输入数据转换为均值为0,方差为1的形式。具体公式如下:
\mu_B = \frac{1}{m}\sum_{i=1}^m x_i
\sigma_B^2 = \frac{1}{m}\sum_{i=1}^m (x_i - \mu_B)^2
\hat{x_i} = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}
其中,\( x_i \) 是一个minibatch中的输入,\( \mu_B \) 和 \( \sigma_B^2 \) 分别是该minibatch输入的均值和方差,\( \epsilon \) 是一个很小的数,防止除以零。
梯度累积是一种应对内存限制或单次GPU内存不足以处理较大batch size的技术。通过逐步累加小batch size的梯度,来模拟大batch size的梯度更新,从而在不显著影响模型性能的情况下,进行更大规模的训练。
### 3.2.2 并行计算与混合精度训练
并行计算是一种利用多核心处理器或多GPU来加速模型训练的技术。PyTorch提供了DataParallel和DistributedDataParallel两种并行计算策略,可以有效地利用多GPU资源。
混合精度训练(Mixed Precision Training, MPT)是一种训练技术,它使用16位浮点数(FP16)来存储模型的权重和计算梯度,同时使用32位浮点数(FP32)来存储优化器的参数。混合精度训练可以减少模型对内存的需求,从而允许使用更大的batch size,同时减少内存带宽的使用,提高计算效率。
在PyTorch中,混合精度训练可以通过`torch.cuda.amp`模块中的`autocast`和`GradScaler`来实现,示例代码如下:
```python
import torch
from torch.cuda.amp import autocast, GradScaler
# 初始化GradScaler
scaler = GradScaler()
for data, target in data_loader:
# 混合精度训练前的模型和优化器状态
model.train()
optimizer.zero_grad()
# 使用autocast包装计算区域
with autocast():
output = model(data)
loss = loss_fn(output, target)
# 梯度缩放
scaler.scale(loss).backward()
# 梯度缩放
scaler.step(optimizer)
# 更新梯度缩放因子
scaler.update()
```
## 3.3 模型压缩与加速
模型压缩与加速是让模型更加轻量级,提高模型在边缘设备上的推理速度,同时降低计算资源和能耗的需要。
### 3.3.1 权重剪枝与量化技术
权重剪枝是一种减少模型参数数量的方法,通过移除一些不重要的权重,减少模型的复杂度。剪枝后的模型通常需要重新训练或者微调以恢复性能。
量化技术是一种减少模型参数存储和计算精度的方法。通过将浮点数权重和激活值转换为低精度的整数表示,可以显著减少模型大小和加速推理速度。量化通常分为动态量化和静态量化,动态量化在每次运行时计算量化参数,而静态量化则是预计算量化参数。
### 3.3.2 轻量化网络模型探索
轻量化网络模型是指那些设计出来能够减少模型参数数量和计算复杂度的网络架构。例如MobileNet、ShuffleNet和EfficientNet等,它们通过设计特殊的结构,如分组卷积、深度可分离卷积等来减少参数数量,同时保持模型性能。
在PyTorch中,你可以使用预训练的轻量化模型进行迁移学习,以实现特定任务的快速部署。例如,使用MobileNetV2来构建一个图像分类器可以按照以下步骤操作:
```python
import torchvision.models as models
import torch.nn as nn
# 加载预训练的MobileNetV2模型
model = models.segmentation.mobilev2(pretrained=True)
# 替换最后的全连接层以适应新的分类任务
num_classes = 10 # 假设我们有10个类别
model.classifier[1] = nn.Conv2d(1280, num_classes, kernel_size=(1, 1), stride=(1, 1))
# 在这里进行模型训练和评估
```
通过以上章节的探讨,我们了解到PyTorch图像分类模型性能优化的多种策略。这些策略不仅提高了模型的性能,还降低了计算资源的需求,使得高效的图像分类模型部署到边缘设备成为可能。在下一章节,我们将通过实战应用,将这些优化策略应用到具体的数据集和模型中去。
# 4. PyTorch图像分类实战应用
## 4.1 数据预处理与增强
### 4.1.1 数据集的加载与转换
在PyTorch中,数据预处理和增强是图像分类任务的关键步骤。这不仅能够扩大训练数据集,还可以提高模型的泛化能力。数据加载和转换的流程通常包括以下几个步骤:
- **数据集划分**:将原始数据集划分为训练集、验证集和测试集。
- **图像加载**:使用`torchvision`中的`ImageFolder`或自定义的数据集加载器来读取图像文件。
- **图像转换**:将图像转换为张量形式,并进行归一化处理。
- **数据增强**:随机进行旋转、缩放、裁剪和颜色变换等增强操作。
一个标准的图像加载和转换代码示例如下:
```python
import torch
from torchvision import transforms, datasets
from torch.utils.data import DataLoader
# 图像预处理和数据增强
transform = transforms.Compose([
transforms.Resize((224, 224)), # 调整图像大小
transforms.RandomHorizontalFlip(), # 随机水平翻转
transforms.ToTensor(), # 将图像转换为Tensor
transforms.Normalize(mean=[0.485, 0.456, 0.406], # 归一化
std=[0.229, 0.224, 0.225])
])
# 加载数据集
data_dir = 'path_to_dataset'
train_dataset = datasets.ImageFolder(data_dir + '/train', transform=transform)
val_dataset = datasets.ImageFolder(data_dir + '/val', transform=transform)
# 创建数据加载器
train_loader = DataLoader(train_dataset, batch_size=32, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=32, shuffle=False)
# 获取数据迭代器
data_iter = iter(train_loader)
images, labels = data_iter.next()
```
在这个例子中,`transforms.Compose`用于将多个预处理步骤合并为一个可执行的转换过程。`transforms.Resize`用于改变图像大小以适应模型输入,而`transforms.RandomHorizontalFlip`增加了数据的多样性。`transforms.ToTensor()`将图像像素值从[0, 255]的范围映射到[0, 1]的范围。最后,`transforms.Normalize`用于对数据进行标准化处理,使其均值为0,标准差为1。
### 4.1.2 增强技术的实际应用案例
下面给出一个使用PyTorch实现数据增强的实战案例。假设我们要对一个猫和狗的分类数据集进行预处理和增强:
```python
import torchvision.transforms as transforms
# 定义转换
transform = transforms.Compose([
transforms.Resize(256),
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]),
])
# 加载数据集
train_dataset = datasets.ImageFolder(root='path_to_train_data', transform=transform)
val_dataset = datasets.ImageFolder(root='path_to_val_data', transform=transform)
# 创建数据加载器
train_loader = DataLoader(dataset=train_dataset, batch_size=32, shuffle=True)
val_loader = DataLoader(dataset=val_dataset, batch_size=32, shuffle=False)
```
在上述代码中,我们首先对训练集中的所有图像应用了变换操作,包括调整图像大小到256×256,随机裁剪到224×224,随机水平翻转,将图像转换为张量,以及进行标准化处理。对于验证集,我们同样应用了这些变换,但不包括随机操作,以保持数据的一致性。
数据增强不仅提高了模型的泛化能力,还能够在一定程度上减轻过拟合现象。通过这种增强技术,模型在学习过程中可以看到更多的数据变化,从而更好地泛化到未见过的数据上。
## 4.2 模型训练与评估
### 4.2.1 训练循环的实现与优化
训练循环是深度学习模型训练过程的核心,涉及前向传播、损失计算、反向传播、参数更新等关键步骤。实现一个高效的训练循环,可以大大提高训练效率和模型性能。
下面是一个基本的训练循环实现代码:
```python
import torch.optim as optim
# 假设已经定义了模型、损失函数和优化器
model = ... # 模型实例
criterion = ... # 损失函数
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9) # 优化器
# 训练模型
num_epochs = 10
for epoch in range(num_epochs):
model.train() # 设置模型为训练模式
running_loss = 0.0
for inputs, labels in train_loader:
optimizer.zero_grad() # 清空梯度
outputs = model(inputs) # 前向传播
loss = criterion(outputs, labels) # 计算损失
loss.backward() # 反向传播
optimizer.step() # 参数更新
running_loss += loss.item()
print(f'Epoch {epoch+1}/{num_epochs}, Loss: {running_loss/len(train_loader)}')
# 保存训练好的模型
torch.save(model.state_dict(), 'model.pth')
```
这个训练循环是针对单个epoch进行的。对于每个batch的数据,首先将模型参数的梯度归零,然后进行前向传播和损失计算,接着进行反向传播以计算梯度,最后使用优化器更新模型参数。整个过程在所有epoch中循环进行。
在实际应用中,为了提高训练效率,通常会采用一些优化策略:
- **梯度累积**:适用于在单个GPU内存中不能加载整个batch的情况下,通过累积多个batch的小梯度来模拟一个大的batch梯度更新。
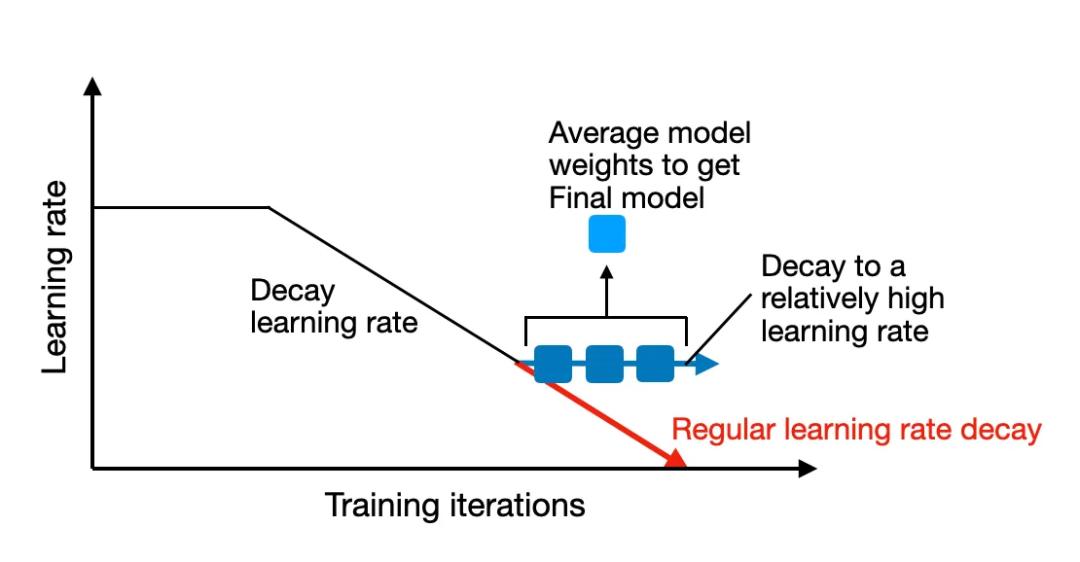
- **学习率调度**:使用学习率衰减或学习率预热,有助于模型更稳定地收敛。
- **梯度裁剪**:在反向传播之后,对梯度进行裁剪,可以防止梯度爆炸。
- **混合精度训练**:结合FP16和FP32来提高训练速度和减少内存占用。
### 4.2.2 模型评估指标与调参策略
模型训练完成后,需要对模型进行评估,以确定其在未见数据上的性能。评估指标通常包括准确率、精确率、召回率和F1分数等。此外,调参是提高模型性能的重要手段,涉及调整学习率、优化器选择、网络结构修改等方面。
- **准确率(Accuracy)**:正确分类的样本数占总样本数的比例。
- **精确率(Precision)**:正确预测为正类的样本占所有预测为正类样本的比例。
- **召回率(Recall)**:正确预测为正类的样本占所有实际为正类样本的比例。
- **F1分数(F1 Score)**:精确率和召回率的调和平均,用来衡量模型的精确度和泛化能力。
在评估模型时,可以使用以下代码:
```python
from sklearn.metrics import accuracy_score, precision_score, recall_score, f1_score
# 使用验证集评估模型
model.eval() # 设置模型为评估模式
all_preds = []
all_labels = []
with torch.no_grad(): # 不计算梯度,节省内存
for inputs, labels in val_loader:
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
all_preds.extend(preds.numpy())
all_labels.extend(labels.numpy())
# 计算评估指标
accuracy = accuracy_score(all_labels, all_preds)
precision = precision_score(all_labels, all_preds, average='macro')
recall = recall_score(all_labels, all_preds, average='macro')
f1 = f1_score(all_labels, all_preds, average='macro')
print(f'Accuracy: {accuracy}, Precision: {precision}, Recall: {recall}, F1 Score: {f1}')
```
对于调参,常见的方法有:
- **网格搜索(Grid Search)**:系统地枚举所有可能的参数组合,并在验证集上评估每一种组合的性能。
- **随机搜索(Random Search)**:与网格搜索类似,但是选择参数的组合是随机的,对于高维参数空间更有效。
- **贝叶斯优化(Bayesian Optimization)**:使用贝叶斯原理对超参数进行优化,能够有效处理参数空间的复杂性和高成本的评估过程。
评估模型时,除了考虑模型在验证集上的表现,还应该注意模型的泛化能力,即在独立的测试集上的表现。此外,模型的性能不应该仅依靠单一指标,而应该综合多个指标来全面评估。
## 4.3 模型部署与优化
### 4.3.1 模型转换与部署流程
训练好的模型需要部署到生产环境中,以供实际应用。在部署过程中,会遇到多种挑战,例如硬件限制、实时性要求以及模型的可维护性等。模型部署的流程一般包括模型转换、模型优化和模型服务三个步骤。
- **模型转换**:将训练好的PyTorch模型转换为适合部署的格式。例如使用`torchvision`中的`torch.save`保存模型,然后使用`torch.load`进行加载;或者使用ONNX(Open Neural Network Exchange)格式进行跨平台部署。
```python
# 保存模型
torch.save(model.state_dict(), 'model.pth')
# 加载模型
model = TheModelClass(*args, **kwargs)
model.load_state_dict(torch.load('model.pth'))
```
- **模型优化**:为了提高模型的运行效率,需要对模型进行优化处理,比如模型剪枝、量化、转换为 TorchScript、ONNX 等。
```python
import torch
from torch.utils.cpp_extension import load
# 使用TorchScript优化模型
scripted_model = torch.jit.script(model)
scripted_model.save('model.pt')
```
- **模型服务**:将优化后的模型部署到服务器或云平台,使用如 TorchServe 这类服务框架进行模型服务。
```python
# 使用TorchServe部署模型
!torchserve --start --model-store model_store --models my_model=model.mar
```
### 4.3.2 部署中的性能优化方法
在部署时,关注模型的运行速度和资源占用是必要的。性能优化方法包括但不限于:
- **模型量化**:将模型的浮点权重转换为低精度(如int8)表示,可以显著减少模型大小并加速计算。
- **模型剪枝**:移除模型中冗余或不重要的参数,减小模型规模,提高推理速度。
- **动态图优化**:PyTorch默认使用动态图计算,但是为了提高效率,可以通过将动态图转换为静态图(如TorchScript)来优化。
- **多线程和异步执行**:通过并行计算和异步数据加载来提高效率。
下面是一个使用量化技术来优化模型性能的例子:
```python
import torch.quantization
# 准备模型
model = ... # 加载预训练模型
# 量化模型
model.qconfig = torch.quantization.get_default_qconfig('fbgemm') # 选择合适的量化配置
torch.backends.quantized.engine = 'fbgemm' # 选择后端计算引擎
model = torch.quantization.prepare(model, inplace=False) # 准备量化模型
# 模型评估,收集校准数据
for data, target in val_loader:
model(data)
# 校准模型并转换为量化模型
model = torch.quantization.convert(model, inplace=False)
# 保存量化模型
torch.jit.save(torch.jit.script(model), 'quantized_model.pt')
```
在上述代码中,模型首先被准备用于量化,然后进行校准,最后转换为一个具有低精度权重的量化模型。量化模型通常占用更少的内存,并且推理速度更快,非常适用于资源受限的环境,如移动设备或嵌入式系统。
总结而言,模型部署的优化可以大幅度提升模型在实际应用中的表现,确保模型的高效稳定运行。通过适当的工具和技术,可以实现从模型训练到部署的无缝衔接,实现模型价值的最大化。
# 5. 性能优化实例分析
## 5.1 现有图像分类模型分析
### 5.1.1 领先模型的性能基准
在AI领域,图像分类模型的性能是评估其实际应用潜力的关键指标。诸如VGG, ResNet, Inception, DenseNet等模型已经在ImageNet挑战赛中证明了它们的高效性。通过对这些模型的性能基准进行比较,我们不仅能够了解当前顶尖技术的水平,还能洞察到模型设计的未来趋势。
### 5.1.2 模型结构与性能关系解读
模型结构直接影响其性能。例如,ResNet引入的残差连接能够解决深度网络中的梯度消失问题,从而使得训练更深的网络成为可能,进一步提高了模型的性能。VGG的简单重复堆叠的卷积层展现了如何通过网络深度来提升特征表达能力。而Inception架构通过引入多尺度的特征提取,显著地提高了对图像内容的识别精度。通过分析这些模型,我们能理解结构设计与性能之间的关系。
## 5.2 实际案例中的性能优化
### 5.2.1 案例一:移动设备上的图像分类
在移动设备上运行图像分类模型时,性能优化尤其关键。由于移动设备的计算能力和内存容量有限,优化措施包括模型剪枝、量化和知识蒸馏等。
#### 模型剪枝示例代码:
```python
from torchvision.models import resnet18
import torch
# 加载预训练模型
model = resnet18(pretrained=True)
# 进行剪枝操作,这里以剪枝50%为例
model = prune(model, percentage=0.5)
```
在上述伪代码中,我们可以通过定义`prune`函数来实现对模型的剪枝操作,以减少模型的参数数量和计算需求,从而使模型更适合在资源受限的移动设备上运行。
### 5.2.2 案例二:大规模数据集的图像分类
对于大规模数据集,如ImageNet等,模型的性能优化策略有所不同。为了处理大量数据,我们可能会依赖于更复杂的模型结构和更多的训练时间,这时批量归一化和学习率调度成为了重要的优化手段。
#### 批量归一化伪代码示例:
```python
import torch.nn as nn
import torch.optim as optim
# 构建模型
model = ...
# 定义优化器
optimizer = optim.SGD(model.parameters(), ...)
# 训练过程中的批量归一化
for batch_idx, (data, target) in enumerate(train_loader):
optimizer.zero_grad()
output = model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
# 在这里可以添加批量归一化的操作
```
在大规模数据集的训练中,批量归一化帮助稳定训练过程,减少模型对初始权重的依赖,同时加快了收敛速度。
## 5.3 未来发展趋势与挑战
### 5.3.1 AI边缘计算的挑战与机遇
边缘计算将数据处理和计算任务迁移到网络的边缘,直接在用户设备上进行,这为图像分类带来了新的挑战,如如何在有限的资源下保持模型性能。同时,这也为AI模型的即时响应和隐私保护提供了新的机遇。
### 5.3.2 模型鲁棒性与泛化能力提升
随着AI应用领域不断扩大,图像分类模型面临的环境越来越复杂,模型的鲁棒性和泛化能力显得尤为重要。如何设计出能抵御各种攻击同时在多变条件下仍保持高效性能的模型,将是未来研究的重点。
在第五章中,我们通过分析现有模型和案例,探讨了图像分类模型在性能优化方面的实践与挑战。接下来的章节将继续深入了解如何在特定场景下实现性能优化,并预测未来的发展方向。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
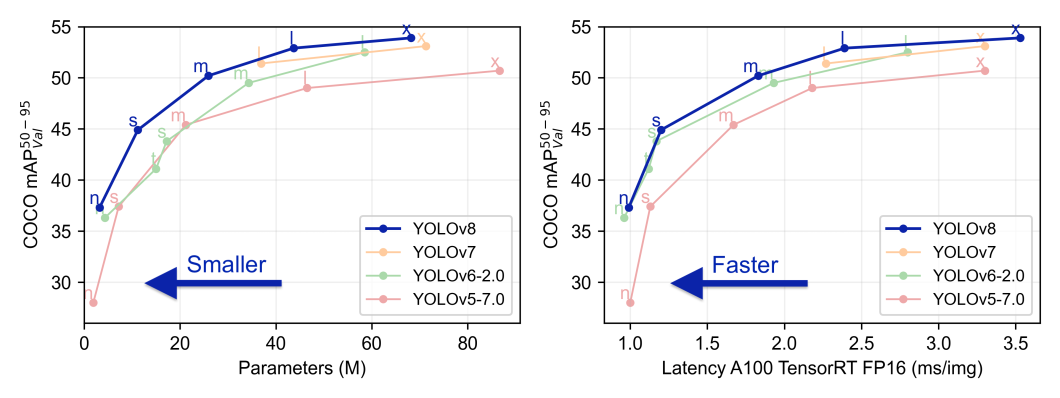
YOLOv8深度解读:如何实现高精度实时检测的终极指南

# 1. YOLOv8概述与核心原理
在计算机视觉领域,YOLOv8作为最新一代实时对象检测系统,继承了YOLO(You Only Look Once)系列模型的高效性与实用性。YOLOv8不仅在速度上保持了前代的快速响应,同时在检测精度上有了质的飞跃,使其在工
VSCode设置深度剖析:一文掌握用户与工作区设置的精髓
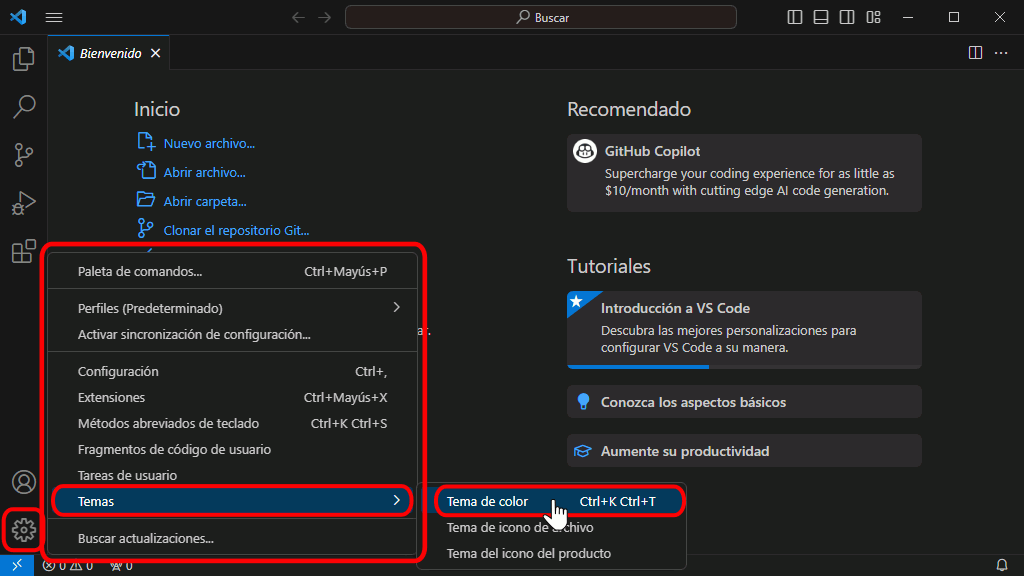
# 1. VSCode简介与设置概览
## 概述
Visual Studio Code,简称VSCode,是一个由微软开发的开源代码编辑器,支持多种编程语言,因其高性能、轻量级和丰富的扩展插件而广受欢迎。在现代软件开发中,VSCode的高效设置对提升工作效率至关重要。
## 核心功能
VSCode的核心功能包括代码高亮、智能补全、版本控制集成、调试工具和
Linux命令对比:locate与find,如何选择最佳搜索策略?

# 1. Linux文件搜索概述
Linux系统中的文件搜索工具是提升工作效率的关键组件。在众多命令中,`locate`和`find`是被广泛使用的两个命令,它们各有特色,适用场景也各有不同。本章将对Linux文件搜索进行概述,包括搜索工具的发展、常见的搜索方法以及它们在
【YOLOv8终极指南】:新一代目标检测技术的全面解析与实战演练
# 1. YOLOv8目标检测技术概述
YOLOv8,作为You Only Look Once系列的最新成员,代表了目标检测领域的一次重大进步。它继承了YOLO系列的实时性和准确性,并在模型设计和算法优化方面实现了跨越性的升级。在本章节中,我们将对YOLOv8进行基础性介绍,包括它的技术特性、应用场景以及它在工业界和研究界中的重要性。
## 1.1 YO
【PyTorch进阶技术】:自定义损失函数与优化策略详解
# 1. PyTorch框架基础
## 简介
PyTorch是一个广泛应用于深度学习领域的开源机器学习库,它以其灵活性和易用性著称。本章将介绍PyTorch的核心概念,为读者构建深度学习模型打下坚实的基础。我们将从PyTorch张量操作、自动梯度计算以及构建神经网络模块开始,逐步深入理解其工作机制。
## PyTorch张量操作
PyTorch中的基本数据结构是张量(Tensor),它类似于多维数组。张
Ubuntu进程管理终极指南:掌握命令、监控与优化
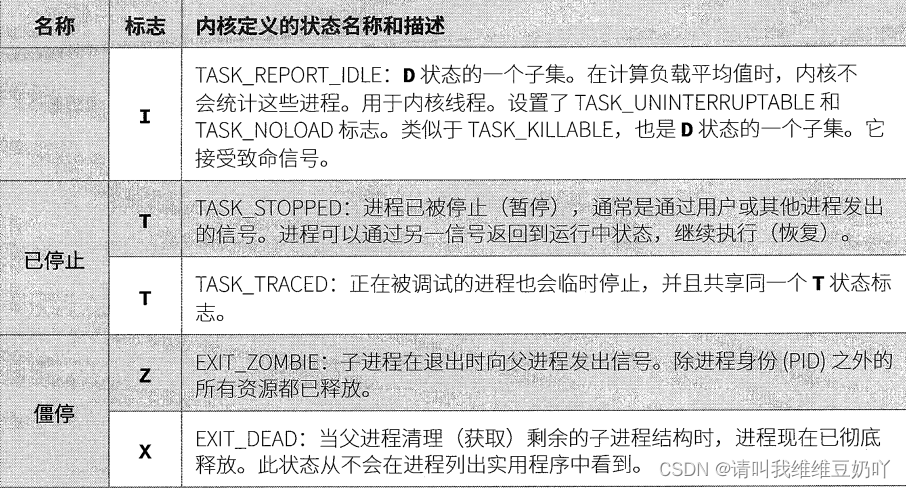
# 1. Ubuntu进程管理基础
在Linux系统中,进程是运行中的程序实例,管理进程是系统管理员必须掌握的关键技能之一。Ubuntu作为广泛使用的Linux发行版,在进程管理方面提供了丰富的工具和方法。本章将为读者介绍Ubuntu中进程管理的基本概念,包括进程的创建、运行、终止以及如何在系统资源有限的情况下合理分配和调度进程。随后,将深入探讨进程查看与管理工具,以及如何通过这些工具实现高效地进程控制和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )