Xenomai实时任务管理:任务调度与同步的终极解决方案
发布时间: 2024-12-14 21:33:59 阅读量: 1 订阅数: 2 

Xenomai实时内核源码:xenomai-v3.2.1.tar.gz
参考资源链接:[Ubuntu安装Xenomai实时系统及IGH主站配置实战](https://wenku.csdn.net/doc/645f227a5928463033a762f5?spm=1055.2635.3001.10343)
# 1. Xenomai实时任务管理概述
在现代的嵌入式系统和实时应用开发中,任务管理是确保系统性能和可靠性的重要组成部分。Xenomai作为一个扩展Linux内核的实时框架,它为开发者提供了一整套强大的工具和接口来管理实时任务。实时任务管理是Xenomai的核心能力之一,涵盖了任务的创建、调度、同步和通信等方面,对于满足严格的时间约束和提高系统的实时性能至关重要。
Xenomai实时任务管理不仅支持传统实时操作系统(RTOS)的功能,还能够与Linux内核进行无缝集成,为开发者提供了一个既熟悉又强大的开发环境。通过使用Xenomai,开发者能够更容易地编写和维护复杂的实时应用程序,同时还能享受到标准Linux系统提供的丰富资源和便利性。
在本章中,我们将首先介绍Xenomai实时任务管理的基本概念和核心优势。然后,我们逐步深入,探究Xenomai任务调度的原理和关键特性,以及它如何通过高级任务同步和通信机制来确保任务之间正确的数据交互和时间上的同步。通过本章的学习,读者将获得对Xenomai实时任务管理的初步理解和掌握,为后续章节中更深入的技术内容打下坚实基础。
# 2. Xenomai任务调度深入解析
## 2.1 Xenomai任务调度基础
### 2.1.1 实时任务的创建和删除
在Xenomai中,实时任务的创建是一个关键步骤,它涉及到任务的初始化和调度。创建一个实时任务通常需要指定任务的入口函数、任务的参数、任务的堆栈大小、以及任务的优先级。以下是创建一个简单的实时任务的示例代码:
```c
#include <rtdm/rtdm.h>
static int my实时任务_entry_point(rtdm_task_t *task, void *arg)
{
// 任务执行代码
return 0;
}
static void my实时任务_destroy(void)
{
// 任务清理代码
}
// 创建实时任务
int create_realtime_task(void)
{
rtdm_task_t my实时任务结构;
int ret = rtdm_task_create(&my实时任务结构, "my_realtime_task",
0, 100, my实时任务_entry_point, NULL,
RTDM.Stack(16384), RTDM.Options NOWAIT);
if (ret) {
rtdm_printk("创建任务失败:%s\n", rtdm_strerror(-ret));
}
return ret;
}
// 删除实时任务
void destroy_realtime_task(rtdm_task_t *task)
{
rtdm_task_destroy(task);
}
```
在上述代码中,`rtdm_task_create`函数用于创建一个实时任务,该函数返回一个`rtdm_task_t`类型的指针,指向创建的任务。在这个函数中,我们指定了任务名称、任务优先级以及任务的入口函数。`RTDM.Stack(16384)`定义了任务的堆栈大小,而`RTDM.Options NOWAIT`表示任务创建后立即运行。
创建任务后,可以使用`rtdm_task_destroy`函数来销毁任务。正确的任务创建和销毁对于系统资源的管理至关重要,避免了资源泄露和系统的不稳定性。
### 2.1.2 实时任务的优先级和调度策略
Xenomai支持多种实时调度策略,包括FIFO、Round-Robin和自定义策略。任务的优先级是由任务在系统中被赋予的优先权等级来决定,这个等级反映了任务获得处理机时间的顺序。在Xenomai中,优先级分为两种:静态优先级和动态优先级。静态优先级在任务创建时定义,并在整个执行周期保持不变;动态优先级可以根据实时需求动态调整。
实时任务优先级的设置对于系统的实时性能至关重要,高优先级的任务应当在低优先级任务之前获得执行。以下是设置实时任务优先级的代码示例:
```c
// 设置实时任务优先级
int set_realtime_priority(rtdm_task_t *task, int priority)
{
rtdm_lock_get(&task->context.lock);
task->context.prio = priority;
rtdm_lock_put(&task->context.lock);
return rtdm_task_set_priority(task, priority);
}
```
在`set_realtime_priority`函数中,首先获取了任务的锁以避免并发访问问题,然后设置了任务的静态优先级,并最终调用`rtdm_task_set_priority`函数应用新的优先级。这个函数会调整任务在系统中的优先级,确保任务调度按照期望执行。
## 2.2 Xenomai高级任务调度
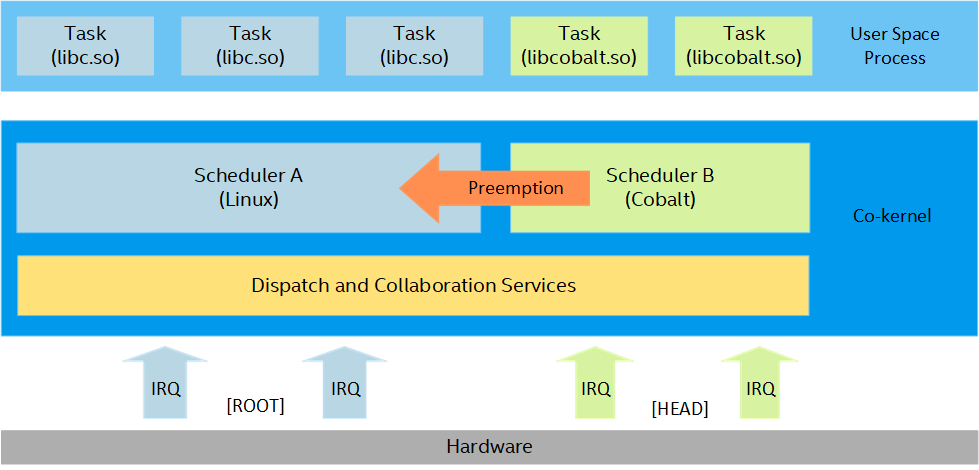
### 2.2.1 混合内核模式与抢占式调度
混合内核模式是Xenomai中一个重要的概念,它允许实时任务和非实时任务在同一环境中运行,而不会相互干扰。在这种模式下,当高优先级的实时任务就绪时,调度器会抢占正在运行的低优先级任务,这保证了实时任务可以即时获得处理器资源。
Xenomai的抢占式调度是通过内核钩子和中断服务例程实现的。在内核中,当实时任务就绪时,会触发一个中断,中断服务例程会被调用,从而挂起当前执行的非实时任务,转而执行更高优先级的实时任务。
抢占式调度确保了高优先级任务的及时响应,但是也可能引起优先级反转的问题,这需要在任务设计中特别注意。
### 2.2.2 实时任务的周期性和非周期性调度
实时任务通常分为周期性任务和非周期性任务两种。周期性任务是按照固定的周期重复执行的任务,而非周期性任务则是在系统事件发生时触发执行的任务。
周期性任务的调度可以使用定时器或周期性中断来实现。在Xenomai中,可以利用内核定时器来创建周期性任务,如下:
```c
#include <rtdm/timer.h>
static void my周期性任务(struct rtdm_timer *timer)
{
// 执行周期性任务代码
rtdm_timer_start_rel(timer, 1000000); // 重新启动定时器,周期为1000ms
}
int setup_periodic_task(rtdm_timer_t *timer)
{
rtdm_timer_init(timer, my周期性任务, NULL);
return rtdm_timer_start_rel(timer, 1000000);
}
void shutdown_periodic_task(rtdm_timer_t *timer)
{
rtdm_timer_cancel(timer);
rtdm_timer_destroy(timer);
}
```
在代码中,`rtdm_timer_init`函数初始化定时器,并指定定时器超时时需要执行的回调函数。`rtdm_timer_start_rel`启动定时器,并设定周期,单位是微秒。
非周期性任务的调度则通常由外部事件触发。可以注册一个中断服务例程,当某个事件发生时,中断服务例程被调用,它再唤醒或启动相应的实时任务。
## 2.3 Xenomai调度器的配置和优化
### 2.3.1 调度器参数的配置
为了适应不同的应用场景,Xenomai允许用户调整调度器的参数以优化系统性能。参数包括任务的调度策略、优先级以及任务执行的时间片等。通过`rtdm_setaffinity`函数可以为任务绑定特定的处理器,以此来优化多核系统的性能。
```c
#include <rtdm/rtdm.h>
int set_task_affinity(rtdm_task_t *task, unsigned long mask)
{
return rtdm_setaffinity(task, mask);
}
```
在这个函数中,`mask`参数用于指定允许任务运行的处理器核心集合。通过合理配置这个参数,可以优化多核处理器系统中任务的执行效率。
### 2.3.2 系统性能的监控和优化策略
为了确保实时任务的及时性和稳定性,监控和优化系统性能是必不可少的。Xenomai提供了`rtdm_irqtrace`工具来跟踪中断的响应时间和任务的调度延迟。此外,利用`rtdm_tuner`工具,开发者可以实时调整调度器参数。
监控工具可以提供实时反馈,帮助开发者了解系统当前的运行状态,发现可能存在的性能瓶颈。例如,高延迟的中断响应可能是由于低优

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Xenomai 实时操作系统的方方面面,从基本概念到安装、性能优化和故障排除。它提供了全面的指南,帮助您在 IGH 主站上配置 Xenomai,并优化其性能以实现卓越的系统响应和稳定性。专栏还涵盖了实时任务管理、内存效率提升、多核处理器优化、存储和备份策略,以及故障排除技巧。通过本专栏,您将掌握 Xenomai 的强大功能,并能够将其有效地部署在您的实时系统中,以满足关键任务应用的需求。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【UHD 620核显驱动与虚拟机兼容性详解】:VMware和VirtualBox中的最佳实践
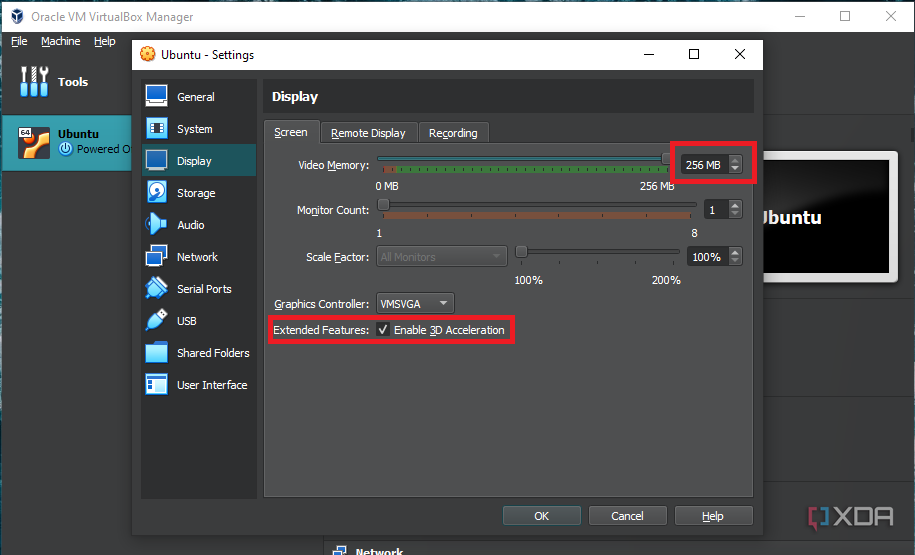
参考资源链接:[Win7 64位下UHD 620/630核显驱动发布(8代处理器适用)](https://wenku.csdn.net/doc/273in28khy?spm=1055.2635.3001.10343)
# 1. UHD 620核显驱动概述
## 1.1 UHD
【BODAS编程实践】:6个高效编码秘诀,让你成为控制应用代码高手
参考资源链接:[BODAS控制器编程指南:从安装到下载的详细步骤](https://wenku.csdn.net/doc/6ygi1w6m14?spm=1055.2635.3001.10343)
# 1. BODAS编程实践概览
在当今这个以数据为中心的世界里,BODAS编程语言因其独特的架构和强大的性能,受到了越来越多开发者的青睐。它不仅仅是一种工具,更是一种设计理念,它在处理大规模数据和实时计算方面展现了出色的能力。本章将为读者提供一
【LabVIEW错误代码应用秘籍】:提升效率的10个技巧
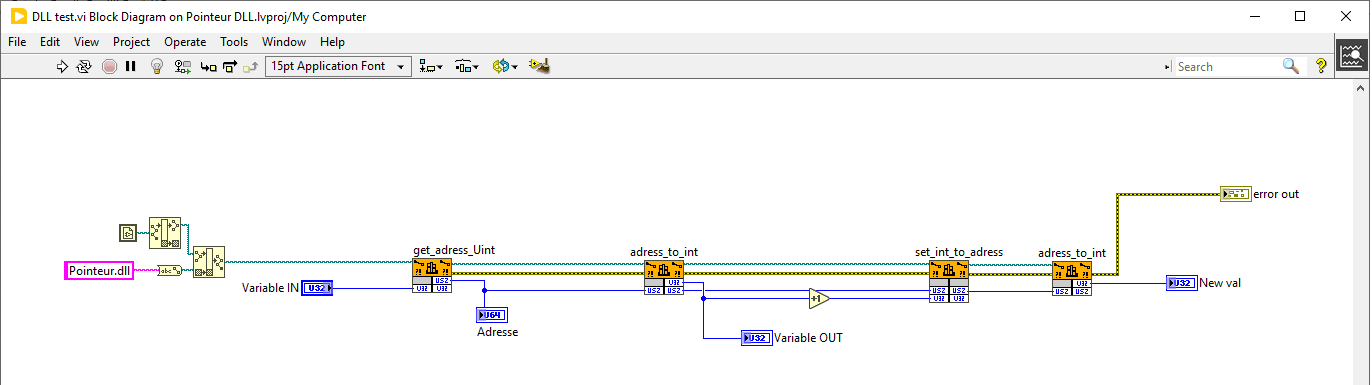
参考资源链接:[LabVIEW错误代码大全:快速查错与定位](https://wenku.csdn.net/doc/7am571f3vk?spm=1055.2635.3001.10343)
# 1. LabVIEW错误代码的基础知识
在LabVIEW的编程实践中,错误代码是程序运行时不可或缺的一部分,它们帮助开发者理解程序执行过程中可能遇到的问题。理解错误代码对于提升L
Fluent UDF并行计算优化秘籍:提升大规模仿真效率的终极指南
参考资源链接:[Fluent UDF中文教程:自定义函数详解与实战应用](https://wenku.csdn.net/doc/1z9ke82ga9?spm=1055.2635.3001.10343)
# 1. Fluent UDF并行计算基础
Fluent是流体仿真领域广泛使用的计算流体动力学(CFD)软件,其用户定义函数(UDF)是扩展软件功能的强大工具。本章节将探
内存乒乓缓存机制:C语言最佳实践
参考资源链接:[C代码实现内存乒乓缓存与消息分发,提升内存响应](https://wenku.csdn.net/doc/64817668d12cbe7ec369e795?spm=1055.2635.3001.10343)
# 1. 内存乒乓缓存机制概述
## 内存乒乓缓存简介
内存乒乓缓存机制是一种高效的内存管理策略,它通过使用两组内存缓冲区交替处理数据流,以减少缓存失效和提高系统性能。这种机制特别适用于数据流连续且具有
宏命令性能优化策略:提升执行效率的5大技巧
参考资源链接:[魔兽世界(WOW)宏命令完全指南](https://wenku.csdn.net/doc/6wv6oyaoy6?spm=1055.2635.3001.10343)
# 1. 宏命令性能优化概述
在现代IT行业中,宏命令作为一种常见的自动化指令集,广泛应用于多种场景,如自动化测试、系统配置等。性能优化,尤其是对宏命令的优化,对于提高工作效率、保障系统稳定性以及实现资源高效利用具有重要意义。本章将
【HBM ESD测试自动化】:结合JESD22-A114-B标准的新技术应用

参考资源链接:[JESD22-A114-B(EDS-HBM).pdf](https://wenku.csdn.net/doc/6401abadcce7214c316e91b7?spm=1055.2635.3001.10343)
# 1. HBM ESD测试概述
在现代电子制造领域中,随着集成电路密度的不断提高和尺寸的不断缩小,电路对静电放电(ESD)的敏感性也随之增加,这成为了电子行
【CAD许可问题急救手册】:迅速诊断并解决“许可管理器不起作用或未正确安装”
参考资源链接:[CAD提示“许可管理器不起作用或未正确安装。现在将关闭AutoCAD”的解决办法.pdf](https://wenku.csdn.net/doc/644b8a65ea0840391e559a08?spm=1055.2635.3001.10343)
# 1. CAD许可问题概述
CAD软件作为工程设计领域不可或缺的工具,其许可问题一直备受关注。本章将为读者提供一个关于CAD许
深入解析STC89C52单片机:掌握内部结构的5大核心要点
参考资源链接:[STC89C52单片机中文手册:概览与关键特性](https://wenku.csdn.net/doc/70t0hhwt48?spm=1055.2635.3001.10343)
# 1. STC89C52单片机概述
STC89C52单片机作为一款经典的8位微控制器,它在工业控制、家用电器和嵌入式系统设计等领域广泛应用于各种控制任务。它由STC公司生产,是基于Intel 8051内核的单片机产品系列之一。该单片机因其高可靠性和高性价比而被广泛采用,其性能在对资源要求不是极高的场合完全能够满足。
核心硬件组成方面,STC89C52拥有4KB的内部程序存储器(ROM)、128字节
【计算机网络与体系结构融合】:整合技术与系统整合的五大方法

参考资源链接:[王志英版计算机体系结构课后答案详解:层次结构、虚拟机与透明性](https://wenku.csdn.net/doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )