机器人技术革命:MATLAB模型预测控制应用详解
发布时间: 2024-12-09 20:31:51 阅读量: 16 订阅数: 14 

机器人开发核心技术详解:从传感到控制
# 1. 机器人技术与模型预测控制基础
随着机器人技术的进步,预测控制作为高级控制策略之一,已经成为确保机器人系统高效、精确运作的关键。模型预测控制(MPC)是一种在工业控制领域广泛应用的算法,其核心思想是利用模型对未来的行为进行预测,并计算出最优控制动作以达到期望的控制目标。本章将概述MPC的基本原理和应用前景,为后续章节中深入分析MPC在机器人领域的应用奠定基础。
# 2. MATLAB在模型预测控制中的应用
## 2.1 MATLAB的基本操作和工具箱介绍
### 2.1.1 MATLAB界面和基本命令
MATLAB(Matrix Laboratory)是一款高性能的数值计算环境和第四代编程语言。其集成了高级数学计算、可视化、编程和交互式环境,非常适合于算法开发、数据可视化、数据分析以及数值计算等领域。
启动MATLAB后,您会看到一个由多个部分组成的界面。主要包括:
- **命令窗口(Command Window)**:用于输入命令和查看输出结果。
- **当前文件夹(Current Folder)**:显示当前工作目录中的文件列表。
- **工作空间(Workspace)**:列出当前工作空间中的所有变量。
- **路径(Path)**:显示当前MATLAB路径,即MATLAB搜索函数和脚本的目录。
- **编辑器/调试器(Editor/Debugger)**:用于创建和编辑文件。
- **命令历史(Command History)**:保存您以前输入的所有命令。
MATLAB中的基本命令大致可以分为以下几类:
- **数学运算命令**:例如加减乘除(`+` `-` `*` `/`),矩阵操作(`det` `inv` `eig`),三角函数(`sin` `cos` `tan`)等。
- **数据分析命令**:用于数据处理和统计分析的命令,如 `mean` `median` `std` `corrcoef`。
- **图形绘制命令**:用于创建、操作和显示图形的命令,如 `plot` `histogram` `imagesc`。
- **文件输入输出命令**:用于读取和写入数据到文件的命令,如 `load` `save` `csvread` `csvwrite`。
```matlab
% 示例:创建一个矩阵并进行简单运算
A = [1 2; 3 4];
B = [2 0; 1 1];
C = A + B; % 矩阵加法
D = A * B; % 矩阵乘法
```
### 2.1.2 控制系统工具箱的概述
控制系统工具箱(Control System Toolbox)为MATLAB用户提供了一套用于控制系统分析和设计的工具。它允许用户创建模型、分析系统稳定性和性能,以及设计反馈控制策略。
控制系统工具箱主要特性包括:
- **系统模型表示**:包括传递函数、状态空间、零点极点以及频率响应等。
- **系统分析**:如根轨迹分析、波特图、奈奎斯特图、时间响应等。
- **控制系统设计**:包括PID控制器设计、状态反馈、观测器设计等。
- **系统仿真**:可以在MATLAB环境内进行系统时间响应的仿真。
```matlab
% 示例:创建传递函数模型并进行根轨迹分析
num = [1 5 6];
den = [1 7 12 0];
sys = tf(num, den);
rlocus(sys); % 绘制根轨迹图
```
### 表格:控制系统工具箱常用函数和功能
| 函数名 | 功能描述 | 示例 |
| --- | --- | --- |
| `tf` | 创建传递函数模型 | `tf(num, den)` |
| `ss` | 创建状态空间模型 | `ss(A, B, C, D)` |
| `zpk` | 创建零点-极点-增益模型 | `zpk(z, p, k)` |
| `rlocus` | 绘制系统根轨迹图 | `rlocus(sys)` |
| `step` | 绘制系统的阶跃响应 | `step(sys)` |
| `bode` | 绘制系统的频率响应图 | `bode(sys)` |
| `pid` | 创建或转换PID控制器模型 | `pid(Kp, Ki, Kd)` |
通过控制系统工具箱,您可以完成从系统建模到控制器设计,再到系统性能分析的整个工作流程。这为模型预测控制在MATLAB中的实现提供了强大支持。
## 2.2 模型预测控制理论基础
### 2.2.1 预测控制的原理和发展历程
模型预测控制(Model Predictive Control,MPC)是一种先进的过程控制策略,它在每个控制周期内解决一个在线优化问题以计算控制动作。MPC的核心思想是基于系统模型预测未来输出,并在预测过程中考虑未来输入的潜在变化。
MPC发展历程大致可以分为三个阶段:
1. **第一代MPC**:70年代初,以简单的线性模型和二次型性能指标为基础,进行滚动优化计算。
2. **第二代MPC**:80年代中后期,更注重处理非线性系统、鲁棒性问题和约束条件。
3. **第三代MPC**:90年代至今,将MPC与优化算法、自适应控制、鲁棒控制等理论结合,形成多种高级MPC策略。
### 2.2.2 预测模型的构建和优化
构建预测模型是实施MPC策略的第一步,涉及系统动力学建模,通常由以下元素组成:
- **模型状态**:描述系统在任意时刻的动态特性。
- **控制输入**:对系统状态产生影响的输入变量。
- **输出变量**:系统状态和控制输入的函数,是外部可观测的部分。
优化过程通常涉及以下要素:
- **预测区间**:计算未来几个时间步长内的系统行为。
- **成本函数**:衡量控制目标和系统性能的标准。
- **约束条件**:确保系统安全运行的限制,如输入和输出限制。
```matlab
% 示例:使用线性模型预测未来的输出
A = [1 1; 0 1];
B = [0.5; 1];
C = [1 0];
D = 0;
model = ss(A, B, C, D);
% 假设系统的初始状态和未来输入
initial_state = [0; 0];
u = [1; 1; 1; 1]; % 连续的控制输入序列
% 使用步长函数进行预测
T = 4;
[y, t, x] = lsim(model, u, [0:T]*0.1, initial_state);
```
在MATLAB环境中,您可以通过线性系统(`ss`)或者传递函数(`tf`)模型来构建预测模型,并利用`lsim`等函数进行预测和仿真。这些功能为MPC设计提供了坚实的理论基础和实践工具。
通过上述章节的介绍,我们了解了MATLAB的基础操作和控制系统工具箱,为深入理解MPC的理论基础和进一步实践打下了基础。接下来,我们将探讨如何在MATLAB中实现MPC,并具体应用到机器人控制领域。
# 3. 机器人模型预测控制的设计与实现
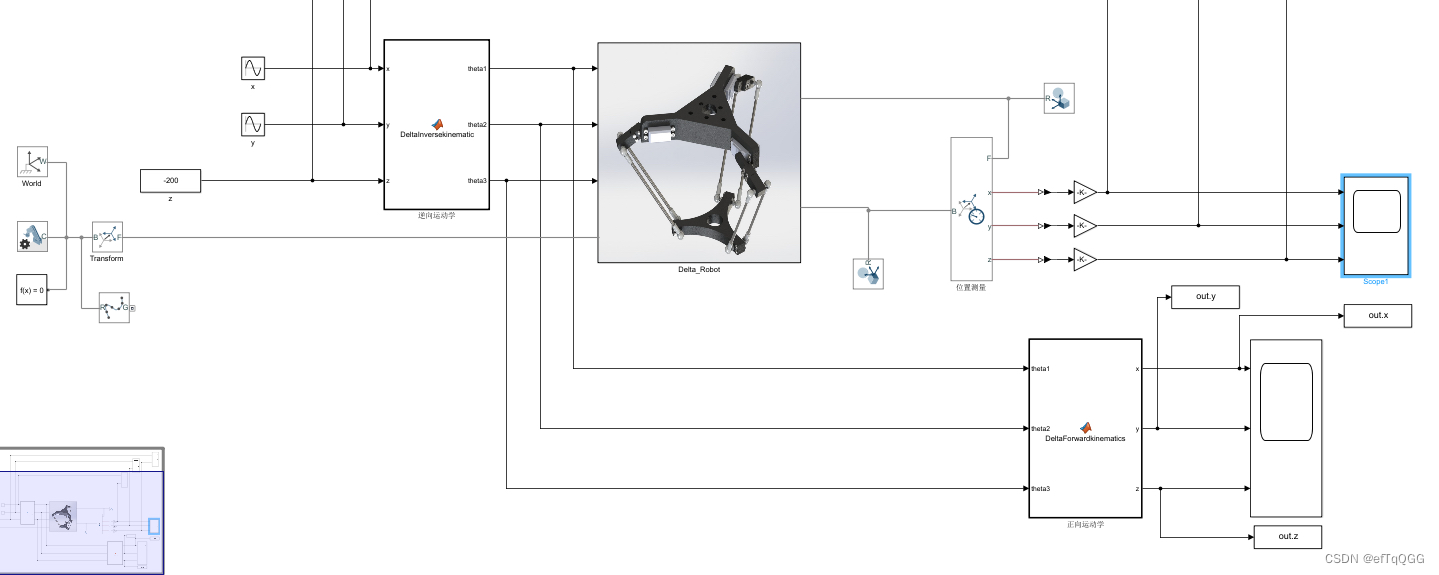
模型预测控制(MPC)是一种先进的控制策略,它在机器人技术领域应用广泛,尤其在面对复杂系统的动态控制时表现出色。本章节将重点介绍机器人模型预测控制的设计与实现过程,包括机器人模型的建立、模型预测控制器的参数调整,以及模型预测控制在实际机器人中的应用案例。
## 3.1 机器人模型的建立与分析
### 3.1.1 机器人动力学模型的建立
机器人动力学模型是实现模型预测控制的基础。在构建机器人动力学模型时,我们通常利用牛顿-欧拉方程或者拉格朗日方程来描述机器人的运动。以下是一个简单的双关节机器人动力学模型的建立过程:
```matlab
% 定义机器人的质量、长度和重力加速度等参数
m1 = 1; % 第一关节的质量
m2 = 1; % 第二关节的质量
l1 = 1; % 第一关节到第二关节的长度
l2 = 1; % 第二关节到机械手末端的长度
g = 9.81; % 重力加速度
% 建立动
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB模型预测控制工具箱的应用专栏深入探讨了模型预测控制 (MPC) 技术,以及如何使用 MATLAB 工具箱实现它。专栏文章涵盖了从基础知识到高级技巧的广泛主题,包括:
* MPC 的入门指南,从概念到实现
* MATLAB 工具箱的实战演练,展示专家级技巧
* 系统仿真和调试技巧,确保模型的准确性
* 参数调优和性能评估秘籍,优化 MPC 性能
* 理论和实践相结合,提供详细的 MATLAB 教程
* 模型搭建和调试技巧,掌握 MPC 仿真艺术
* 硬件在环测试的挑战和解决方案
* MPC 与 PID 控制的深入比较
* 机器人技术中的 MPC 应用
* 实时性能优化策略
* 模型验证和数据集准备技巧
* 动态系统建模技术和策略
* 鲁棒性提升方法,增强 MPC 的可靠性
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
精通VW 80808-2 OCR错误诊断:快速解决问题的7种方法

参考资源链接:[Volkswagen标准VW 80808-2(OCR)2017:电子元件与装配技术详细指南](https://wenku.csdn.net/doc/3y3gykjr27?spm=1055.2635.3001.10343)
# 1. VW 80808-2 OCR错误诊断概述
在数字化时代,光学字符识别(
LIFBASE性能调优秘笈:9个步骤提升系统响应速度
参考资源链接:[LIFBASE帮助文件](https://wenku.csdn.net/doc/646da1b5543f844488d79f20?spm=1055.2635.3001.10343)
# 1. LIFBASE系统性能调优概述
在IT领域,随着技术的发展和业务需求的增长,系统性能调优逐渐成为保障业务连续性和用户满意度的关键环节。LIFBASE系统作为
【XILINX 7代XADC进阶手册】:深度剖析数据采集系统设计的7个关键点

参考资源链接:[Xilinx 7系列FPGA XADC模块详解与应用](https://wenku.csdn.net/doc/6412
OV426功耗管理指南:打造绿色计算的终极武器
参考资源链接:[OV426传感器详解:医疗影像前端解决方案](https://wenku.csdn.net/doc/61pvjv8si4?spm=1055.2635.3001.10343)
# 1. OV426功耗管理概述
在当今数字化时代,信息技术设备的普及导致了能源消耗的剧增。随着对节能减排的全球性重视,如何有效地管理电子设备的功耗成为了IT行业关注的焦点之一。特别是对于高性能计算设备和嵌入式系统,合理的功耗管理不仅能够降低能源消耗,还能延长设备的使用寿命,提高系统的稳定性和响应速度。OV426作为一款先进的处理器,其功耗管理能力直接影响到整个系统的性能与效率。接下来的章节中,我们将深入
深入探讨:银行储蓄系统中的交易并发控制
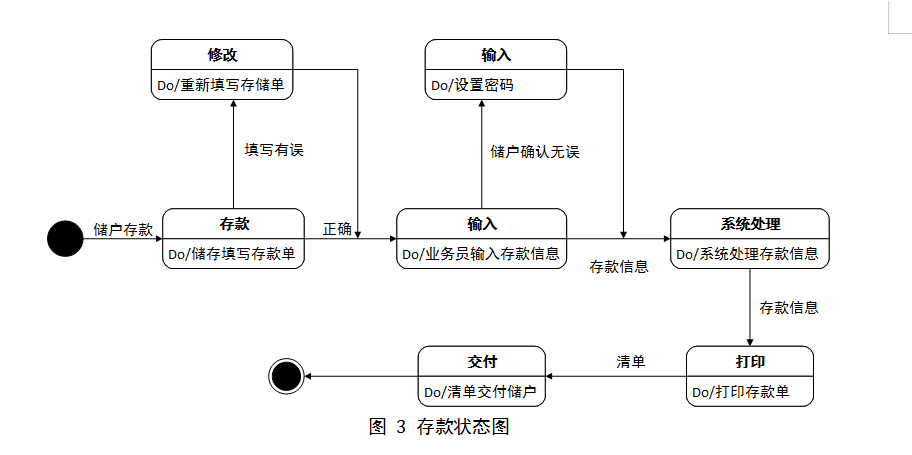
参考资源链接:[银行储蓄系统设计与实现:高效精准的银行业务管理](https://wenku.csdn.net/doc/75uujt5r53?spm=1055.2635.3001.10343)
# 1. 银行储蓄系统的并发问题概述
## 1.1 并发访问的必要性
在现代银行业务中,储蓄系统的并发处理是提高交易效率和用户体验的关键。随着在线交易量的增加,系统需要同时处理来自不同客户和分支机构的请求。并发访问确保了系统能够快速响应,但同时也带来了数
【HyperMesh材料属性至边界条件】:打造精准仿真模型的全路径指南

参考资源链接:[Hypermesh基础操作指南:重力与外力加载](https://wenku.csdn.net/doc/mm2ex8rjsv?spm=105
【热管理高手进阶】:Android平台下高通与MTK热功耗深入分析及优化
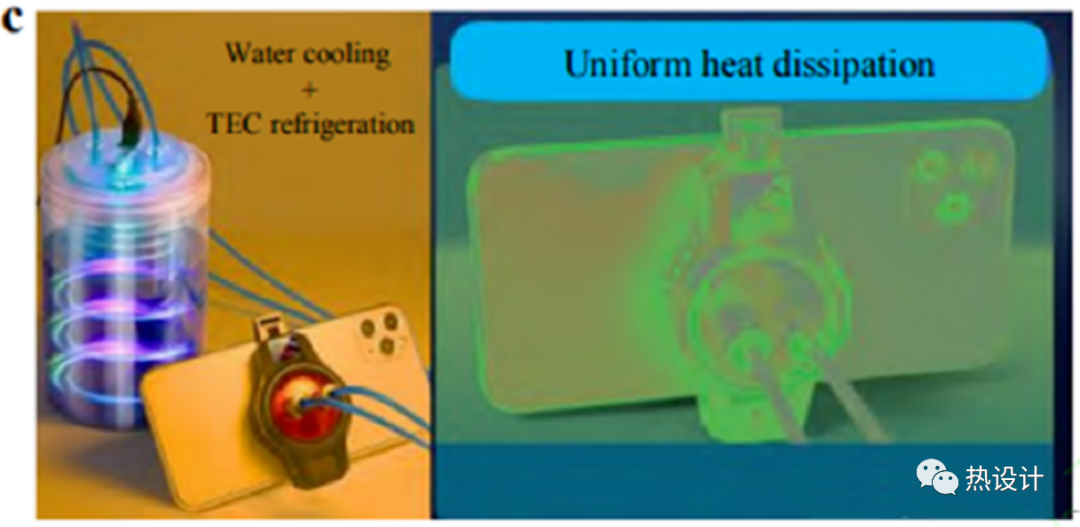
参考资源链接:[Android高通与MTK平台热管理详解:定制Thermal与架构解析](https://wenku.csdn.net/doc/6412b72dbe7fbd1778d495e3?spm=1055.2635.3001.10343)
# 1. Android热管理基础与挑战
在当今的移动设备领域,Andr
【DS-K1T673误识率克星】:揭秘误差分析及改善策略

参考资源链接:[海康威视DS-K1T673系列人脸识别终端用户指南](https://wenku.csdn.net/doc/5swruw1zpd?spm=1055.2635.3001.10343)
# 1. 误差分析与改善策略的重要性
## 1.1 误差在IT领域的普遍性
在IT行业,数据和系统准确性至关重要。误差,无论是人为的还是技术上的,都可能导致重大的问题,如系统故障、数据失真和决策
【PADS Layout专家速成】:7步掌握覆铜技术,优化电路板设计
参考资源链接:[PADS LAYOUT 覆铜操作详解:从边框到填充](https://wenku.csdn.net/doc/69kdntug90?spm=1055.2635.3001.10343)
# 1. 覆铜技术概述
在现代电子设计制造中,覆铜技术是构建电路板核心的一环,它不仅涉及基础的电气连接,还包括了信号完整性、热管理以及结构稳定性等多方面考量
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )