破解电机控制系统的旋转编码器代码:AD2S1210应用与故障排除
发布时间: 2024-12-14 15:57:27 阅读量: 3 订阅数: 3 

ad2s1210.rar_AD2S1210_变压器_旋转变压器_旋转编码器
参考资源链接:[AD2S1210旋变数字转换器手册:10-16位高精度设计](https://wenku.csdn.net/doc/645ef4395928463033a6b079?spm=1055.2635.3001.10343)
# 1. 旋转编码器及其在电机控制中的作用
## 1.1 旋转编码器的基本概念
旋转编码器是一种将旋转运动转换成电信号的装置,广泛应用于测量角度、位置和速度。它由机械部分和电气部分组成,机械部分负责将轴的旋转运动转换为电脉冲,而电气部分将这些脉冲转换为可读的电子信号,最终由控制系统解读。
## 1.2 旋转编码器在电机控制中的重要性
在电机控制系统中,旋转编码器起到了至关重要的作用。它作为反馈元件,向控制器提供实时的位置和速度信息。这使得控制系统能够精确地控制电机的运动,实现精确定位、速度控制和运动优化。无论是工业自动化、机器人技术还是汽车电子,旋转编码器都是提高系统性能不可或缺的组件。
# 2. AD2S1210旋转编码器基础
### 2.1 AD2S1210的技术规格和性能特点
#### 2.1.1 功能概述
AD2S1210是一款高性能、双通道、绝对式编码器接口芯片,广泛应用于需要高精度角度和速度反馈的伺服控制系统中。它主要由信号解码器、可编程数字滤波器、控制逻辑以及串行通信接口等部分组成。
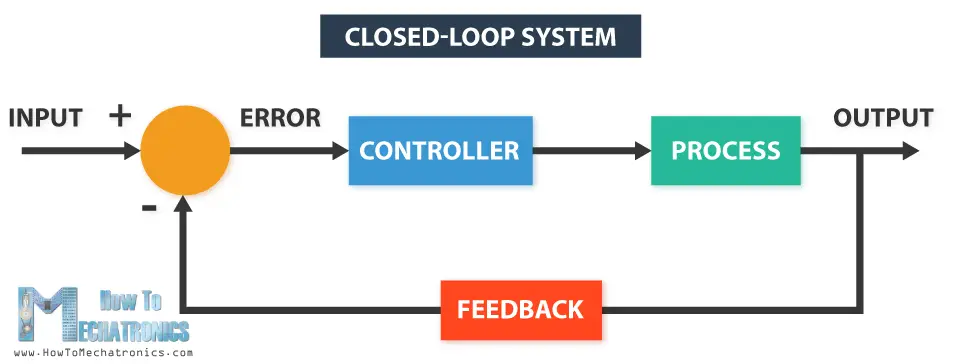
AD2S1210能够将旋转编码器的正弦波和余弦波模拟信号转换成数字信号,并且通过内置的跟踪转换器直接输出角度和速率信息。这些信息可以作为闭环控制系统的反馈,以实现精确的位置和速度控制。
#### 2.1.2 关键技术参数解析
AD2S1210的关键技术参数主要包括:
- **分辨率**:支持12位到16位的分辨率配置,决定了编码器的精确度。
- **动态特性**:包括最大跟踪速度和响应时间等,直接关系到系统的实时性能。
- **输入信号**:支持正弦波或方波输入,适应不同类型的编码器。
- **输出接口**:支持同步串行接口(SPI),方便与微控制器或DSP等进行通信。
- **电源电压**:工作电压通常为5V,与标准的数字逻辑兼容。
### 2.2 AD2S1210与微控制器的接口设计
#### 2.2.1 硬件连接指南
硬件连接是实现AD2S1210与微控制器成功通信的前提。关键连接步骤如下:
1. 将AD2S1210的VDD和GND引脚连接到稳定的5V电源和地线。
2. 将编码器的正弦和余弦输出连接到AD2S1210的相应输入端。
3. 通过SPI接口连接AD2S1210的数据输出端到微控制器,包括MISO、MOSI、SCK以及CS(片选信号)。
4. 对于一些微控制器,可能还需要连接AD2S1210的使能和复位引脚。
#### 2.2.2 接口电路设计实践
在设计接口电路时,需要注意如下几点:
- 为模拟信号输入端提供适当的滤波处理,以减少电磁干扰的影响。
- 使用适当的隔离措施,确保数字信号的稳定性和安全性。
- 确保AD2S1210的时钟频率符合微控制器的SPI接口要求。
下面是一个简化的硬件连接示意图:
```mermaid
graph LR
A[旋转编码器] -->|正弦余弦信号| B[AD2S1210]
B -->|SPI接口| C[微控制器]
B -->|电源| D[5V电源]
B -->|地线| E[地线]
B -->|滤波| F[滤波器]
```
### 2.3 AD2S1210的初始化和配置
#### 2.3.1 软件配置过程
在软件层面上,AD2S1210的初始化和配置主要通过编程实现。以下是初始化的基本步骤:
1. 初始化微控制器的SPI接口。
2. 设置AD2S1210的配置寄存器,选择分辨率、数据格式等参数。
3. 根据需要启用特定的功能,如数字滤波器。
4. 完成配置后,开始数据的读取和处理。
#### 2.3.2 配置参数详解
配置参数包含了与AD2S1210通信和运行相关的重要设置。常见的参数包括:
- **分辨率选择**:通过写入控制寄存器设置所需的分辨率。
- **数据格式**:决定输出数据的格式,例如,是否采用二进制补码。
- **滤波器配置**:通过调整滤波器参数,优化信号质量,减少错误。
示例代码块展示如何配置AD2S1210:
```c
// 初始化SPI通信
SPI_Init();
// 配置AD2S1210寄存器
uint8_t control_reg = 0x34; // 示例值,根据实际需求设置
AD2S1210_WriteRegister(CONTROL_REG_ADDR, control_reg);
// 读取位置数据
uint16_t position_data = AD2S1210_ReadPosition();
// 位置数据转换为角度值
float angle = ConvertToAngle(position_data);
```
在上述代码中,`SPI_Init()`是初始化SPI接口的函数,`AD2S1210_WriteRegister()`和`AD2S1210_ReadPosition()`分别用于写入和读取AD2S1210的寄存器。`ConvertToAngle()`函数是将读取的位置数据转换为角度的自定义函数。每一步操作后,可能需要进行必要的参数检查和错误处理。
以上章节详细介绍了AD2S1210旋转编码器的基础知识,包括其技术规格、硬件连接和软件配置。通过这些内容,读者应能够理解AD2S1210的基本工作原理和如何将其集成到控制系统中。在后续章节中,我们将深入探讨编程、集成到电机控制系统、故障诊断与排除以及高级应用和未来展望等内容。
# 3. AD2S1210旋转编码器的编程与集成
## 3.1 编程接口与数据格式
### 3.1.1 数据位定义
旋转编码器的输出接口类型通常有并行和串行两种,AD2S1210支持串行接口输出。在串行通信中,数据位定义需要清晰理解以确保数据的正确读取。AD2S1210编码器通常使用SPI接口,它包括以下几个关键数据位:
- **CS(Chip Select)**:片选信号,用于启用AD2S1210芯片。当CS为低电平时,数据线上的通信被激活。
- **SCLK(Serial Clock)**:串行时钟输入,用于同步数据传输。
- **SDO(Serial Data Out)**:串行数据输出,发送编码器的测量数据。
- **SDI(Serial Data In)**:串行数据输入,发送指令给AD2S1210。
- **INT(Interrupt)**:中断信号输出,当输出缓冲区有新数据时,INT会变为低电平。
### 3.1.2 数据格式转换
在获取数据之后,需要将接收到的二进制数据转换成可以识别的位置信息。AD2S1210提供了不同的分辨率选择,如12位、14位或16位分辨率。数据位的排列和转换规则依赖于选择的分辨率和测量模式。例如,如果AD2S1210配置为14位分辨率,那么SDO线会连续发送14个数据位。
以下是将接收到的原始二进制数据转换为角度值的示例代码块:
```c
uint16_t raw_data; // 假设从AD2S1210读取的原始数据
uint16_t position; // 转换后的位置值
// 读取原始数据(此处代码假设已经通过SPI读取到SDO线上的数据)
raw_data = read_ad2s1210_data();
// 将原始数据右移一位以去掉片选信号位
raw_data >>= 1;
// 根据配置的分辨率转换原始数据到角度值(例如14位分辨率)
position = (uint16_t)(raw_data * (360.0 / (1 << 14)));
// 输出位置值
printf("The position of the motor is: %d degrees\n", position);
```
在此代码段中,首先从AD2S1210读取原始数据,然后通过逻辑右移操作去除CS位。之后,将原始数据转换为相应的角度值。注意,这里的转换因子依赖于编码器的具体分辨率设置。
## 3.2 编程实践:读取位置数据
### 3.2.1 编程模型介绍
为了从AD2S1210读取位置数据,需要建立一个编程模型,该模型应包含初始化通信协议、设置配置寄存器、读取数据和错误检查等步骤。基本的编程模型可以分为以下几个步骤:
1. **初始化SPI接口**:配置微控制器的SPI接口,包括时钟速率、数据格式等。
2. **发送初始化指令**:通过SPI发送指令来设置AD2S1210的工作模式,包括分辨率和测量模式。
3. **循环读取数据**:周期性地通过SPI发送读取数据指令,并接收位置数据。
4. **数据解析**:将接收到的原始二进制数据转换为实际位置值。
5. **错误检查与处理**:检测通信错误或数据异常,并进行相应处理。
### 3.2.2 编程示例与代码解析
下面提供了读取AD2S1210位置数据的示例代码,并包含了详细的逻辑分析:
```c
// 定义SPI通信相关的宏
#define SPI_PORT SPI2
#define CS_PIN GPIO_Pin_13
#define CS_PORT GPIOB
// SPI初始化函数
void spi_init(void) {
// 代码略,初始化SPI2端口的相关设置
}
// 通过SPI发送指令并获取数据
uint16_t spi_transfer(uint8_t cmd) {
uint8_t spi_buf[3] = { cmd, 0, 0 }; // 命令和两个字节的数据接收缓冲区
// 执行SPI通信的代码略
return ((uint16_t)spi_buf[1] << 8) | spi_buf[2];
}
// 读取AD2S1210位置数据的主函数
void read_ad2s1210_position(void) {
uint16_t position;
uint8_t read_cmd = 0x03; // 读取数据的指令代码
// 选择AD2S1210芯片(CS为低电平)
GPIO_ResetBits(CS_PORT, CS_PIN);
// 发送读取数据的命令
position = spi_transfer(read_cmd);
// 取消选择AD2S1210芯片(CS为高电平)
GPIO_SetBits(CS_PORT, CS_PIN);
// 逻辑位移和转换为位置值(根据实际情况调整转换方法)
position >>= 2;
position = (position * 360) / 0x3FFF; // 假设为14位分辨率
// 输出位置值
printf("Motor position: %d degrees\n", position);
}
int main(void) {
// 初始化SPI接口和GPIO
spi_init();
// 循环读取电机的位置数据
while (1) {
read_ad2s1210_position();
// 延时代码略,根据需要的读取频率设置
}
}
```
在此代码中,我们定义了SPI初始化函数、通过SPI发送数据函数和读取位置数据的主函数。`spi_transfer`函数负责与AD2S1210进行SPI通信,将指令发送出去,并接收两个字节的位置数据。之后,我们根据AD2S1210的技术手册,对数据位进行正确的位移和转换,最终得到电机的实际位置。
## 3.3 集成AD2S1210到电机控制系统
### 3.3.1 控制系统架构概述
将AD2S1210集成到电机控制系统中,需要考虑系统中的各个组件如何协同工作。一个典型的电机控制系统架构包括电机驱动器、控制处理器和反馈系统(如AD2S1210编码器)。控制处理器负责发送控制命令到电机驱动器,并根据来自AD2S1210的反馈信号调整控制策略。
控制系统中,反馈信号的处理尤为重要。处理器需要实时处理编码器数据,包括速度、位置等信息,并将这些信息用于电机的实时控制。控制算法可以是简单的PID控制,也可以是更复杂的控制策略,如模糊逻辑控制或神经网络控制。
### 3.3.2 集成步骤与调试技巧
集成AD2S1210到电机控制系统需要遵循以下步骤:
1. **硬件连接**:确保AD2S1210与微控制器的SPI接口正确连接,包括CS、SCLK、SDO和SDI线。
2. **软件配置**:在控制处理器中配置SPI接口和AD2S1210参数,包括分辨率和数据格式。
3. **编程实现**:编写代码实现电机控制逻辑和AD2S1210数据的读取与解析。
4. **系统测试**:进行系统测试,确保编码器数据准确,并对电机进行控制测试。
5. **调试优化**:根据测试结果调整控制算法参数,优化系统性能。
调试技巧如下:
- **检查SPI通信**:确保SPI通信没有错误,可以通过循环读取一个已知值来检查通信是否稳定。
- **使用示波器检测信号**:使用示波器可以直观地看到SPI通信过程中的信号变化,帮助识别问题。
- **逐步调试**:在实现控制算法时,逐步调试每部分代码,确保每一步都按预期工作。
- **记录日志**:在控制处理器中记录关键数据和错误信息,有助于分析问题所在。
通过遵循以上步骤和调试技巧,可以有效地将AD2S1210集成到电机控制系统中,并确保系统的高效和稳定运行。
以上为第三章的详细内容,我们将继续探索旋转编码器AD2S1210的编程与集成细节,以及如何将它应用到电机控制系统中。在下一章节,我们将介绍AD2S1210旋转编码器的故障诊断与排除方法。
# 4. AD2S1210故障诊断与排除
## 4.1 常见故障分析
### 4.1.1 硬件故障识别
在使用AD2S1210旋转编码器时,硬件故障可能是由于多种原因造成的,包括接线错误、供电不稳定、或者设备的物理损坏。识别硬件故障的第一步是仔细检查所有的接线和连接,确认没有松动或不正确的接线存在。电源电压的稳定性对AD2S1210的正常工作至关重要,电源电压的波动可能导致设备无法正常运行。此外,由于旋转编码器内部通常包含精密的机械部件,长时间的使用或环境因素可能造成磨损或损坏。
为了进一步诊断硬件故障,可以使用数字万用表测量供电电压,确保其在数据手册中规定的工作范围之内。另外,检查编码器与电机的连接是否牢固,以及旋转编码器的壳体是否有明显的损伤。在一些情况下,可能需要拆卸编码器壳体以检查内部是否受到污染或存在物理损伤。
### 4.1.2 软件故障排查
AD2S1210旋转编码器的软件故障通常与初始化配置不当、软件程序错误或通信协议不匹配有关。在进行软件故障排查时,第一步是验证编码器的初始化代码是否正确执行。若初始化过程中出现异常,可能需要检查通信协议设置,如SPI总线的时钟速率、数据格式和位顺序等参数。
软件故障排查还需要对微控制器与AD2S1210之间的通信进行监控,通过示波器或逻辑分析仪检查通信信号的完整性。如果通信信号存在噪声或异常跳变,那么可能需要对系统接地和信号线路进行检查,以排除电磁干扰导致的问题。
## 4.2 故障排除技巧与案例研究
### 4.2.1 故障排除流程
故障排除流程应遵循一系列有逻辑的步骤,首先从简单的检查开始,逐步深入到更复杂的测试。以下是针对AD2S1210旋转编码器的一般性故障排除流程:
1. **视觉检查**:检查设备外观是否有明显损坏、接线是否正确和牢固。
2. **供电检查**:使用万用表测量AD2S1210的供电电压,确认其在正常范围内。
3. **通信检查**:检查与编码器通信的数据线,确保信号传输无误。
4. **软件配置检查**:确认旋转编码器的配置参数是否符合应用需求,并且与软件配置相匹配。
5. **软件功能测试**:运行一系列功能测试,验证设备是否按预期工作。
6. **诊断信息分析**:如果有可用的错误代码或诊断信息,应根据AD2S1210的数据手册进行分析。
### 4.2.2 典型案例分析
**案例一:位置数据读取不准确**
在一个应用案例中,工程师发现AD2S1210旋转编码器读取的位置数据经常出现错误。通过故障排除流程,初步的视觉检查并未发现明显的硬件问题。在进一步的供电检查中,发现供电电压虽然在规定范围内,但存在轻微的波动。软件配置检查显示初始化代码正确设置,但通信检查发现数据线上有噪声干扰。
在诊断信息分析后,确认问题为电源波动和通信干扰引起。解决措施包括对电源进行滤波处理以稳定供电,并在编码器与控制器之间加入光电隔离器以减少干扰。最终,经过调整后,编码器读取位置数据的准确性得到显著提高。
**案例二:编码器无法启动**
另一个案例中,AD2S1210在初始化后无法开始工作,设备没有任何响应。通过视觉检查未发现损坏,供电检查确认电源正常。在通信检查时,发现初始化代码的执行未能成功激活旋转编码器。经分析诊断信息,发现初始化参数设置错误。
针对此案例,工程师重新核对了初始化参数,并按照AD2S1210的数据手册进行了配置。配置正确后,编码器成功启动并正常工作。此案例说明了正确的软件配置对设备正常运行的重要性。
## 4.3 维护与预防措施
### 4.3.1 日常维护建议
为了确保AD2S1210旋转编码器能够长期稳定地工作,日常维护至关重要。日常维护应该包括定期检查接线,确保无松动或腐蚀;检查供电电压,保证稳定供电;以及清理编码器外壳,确保没有灰尘或污染物影响设备性能。
此外,应定期进行软件诊断测试,以识别和解决潜在的软件配置问题。在一些应用中,编码器会暴露在恶劣的工业环境中,因此应考虑增加额外的防护措施,比如使用密封罩来防止灰尘和水蒸气进入设备。
### 4.3.2 预防性维护策略
预防性维护策略不仅包括日常维护措施,还包括建立定期检查和维护的日程安排,以及对设备运行状况进行持续监测。在一些高可靠性要求的应用场合,可以使用智能监控系统来实时跟踪设备状态,并通过数据分析预测可能发生的故障。
在设计预防性维护策略时,应考虑到旋转编码器的工作环境、预期寿命以及制造商的维护建议。对于那些无法承受故障停机的应用,可以实施更为严格的监控和检查计划,甚至包括备件管理和快速更换方案。通过综合应用这些策略,可以最大程度地减少意外停机时间,提高设备整体的可靠性和效率。
# 5. 高级应用与未来展望
## 5.1 AD2S1210在复杂应用中的优化
AD2S1210作为一款高精度的旋变转角编码器,已经在许多复杂的电机控制系统中找到了其位置。但在高级应用中,我们通常还需要对其进行优化以应对更高的性能要求。
### 5.1.1 高性能系统的优化技巧
在高性能系统中,AD2S1210的优化主要集中在减少响应时间、提高精度和稳定性能等方面。
#### 减少响应时间
为了减少AD2S1210的响应时间,可以采取以下措施:
1. 选择合适的通信协议(如SPI或SSI)以匹配系统的处理能力。
2. 优化软件协议,减少协议的开销和处理时间。
3. 选择更快速的微控制器或处理器。
#### 提高精度和稳定性
提高AD2S1210精度和稳定性的措施包括:
1. 校准编码器以消除任何系统性的测量误差。
2. 使用温度补偿技术,以减少环境温度变化对测量精度的影响。
3. 增加硬件滤波器或软件滤波算法,降低噪声干扰。
### 5.1.2 多轴控制与同步
在多轴控制系统中,对AD2S1210的同步性和精度要求更为严格。实现高精度的多轴同步控制,可以考虑以下策略:
1. 使用分布式控制架构,每个轴都有自己的控制单元和编码器。
2. 在主控制单元实现统一的同步机制,比如时间标记或者事件触发机制。
3. 利用编码器的内置同步功能,如果可用,确保所有编码器在一个精确定义的时间内同时更新其位置数据。
```mermaid
graph TD;
A[主控制单元] -->|时间标记| B(轴1控制单元)
A -->|时间标记| C(轴2控制单元)
A -->|时间标记| D(轴3控制单元)
B --> E(轴1编码器)
C --> F(轴2编码器)
D --> G(轴3编码器)
```
上图展示了多轴控制与同步的逻辑流程图,强调了主控制单元与各轴控制单元及编码器之间的同步关系。
## 5.2 AD2S1210的替代品与新兴技术
随着技术的不断进步,AD2S1210也面临着来自新竞争者和新兴技术的挑战。在这一部分,我们将探讨一些替代品,并分析相关技术趋势。
### 5.2.1 竞争产品比较
市场上有许多与AD2S1210竞争的产品。这些产品从成本、性能、集成度等多个方面对AD2S1210构成了挑战。例如:
- **AMT系列旋变编码器**:以低成本和低功耗为卖点,但在精度和温度范围上可能不如AD2S1210。
- **AEAT系列绝对式编码器**:在一些应用中可以提供无限制的旋转角度,这是旋转编码器的一个优势。
### 5.2.2 新兴技术趋势分析
随着技术的不断发展,新的传感器技术和编码器解决方案正在出现。例如,磁编码器和光学编码器正在逐渐成为传统旋变编码器的替代品,因为它们在某些应用场合下能够提供更好的性能。
磁编码器利用磁性材料的特性来测量角度,这使得它们在恶劣环境下(如高湿度、高温或强震动环境)表现更佳。光学编码器则利用光学技术实现高精度的位置测量,通常适用于高端应用。
在这些新兴技术中,光栅尺编码器和激光编码器开始被广泛研究和应用。这些编码器在精度上能进一步超越传统的旋转编码器,并在高精度定位和测量领域中展现了潜力。
```
表格 1 - 竞争产品功能对比
| 功能特性 | AD2S1210 | AMT系列 | AEAT系列 |
|---------------|-----------|---------|----------|
| 成本 | 中等/高 | 低 | 中等 |
| 精度 | 高 | 中等 | 高 |
| 功耗 | 中等 | 低 | 中等 |
| 温度范围 | 宽 | 窄 | 中等 |
| 多轴同步能力 | 支持 | 不明确 | 支持 |
```
通过这样的对比表格,我们可以更直观地了解不同编码器产品的性能差异和优势所在。
从长远来看,随着工业自动化和智能制造的发展趋势,对于高精度、高可靠性的位置传感器的需求将会持续增长。这将推动更多的研究投入和技术创新,为未来的编码器产品带来更多的可能性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PelcoD云台控制协议高级教程】:专家级优化策略与扩展功能

参考资源链接:[PelcoD云台控制协议官方完整版:扩展命令与高级功能解析](https://wenku.csdn.net/doc/6401abbecce7214c316e9589?spm=1055.2635.3001.10343)
# 1. PelcoD协议基础与云台控制概览
## 1.1 PelcoD协议简介
PelcoD协议作为安防领
快速精通EnergyPlus模型建立:新手入门至高手速成指南
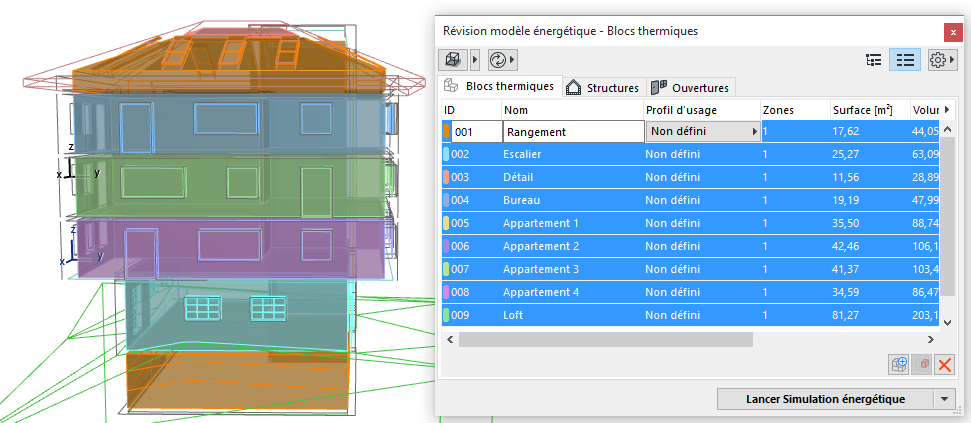
参考资源链接:[EnergyPlus入门教程:参数设置与故障解决详解](https://wenku.csdn.net/doc/6412b77bbe7fbd1778d4a738?spm=1055.2635.3001.10343)
# 1. EnergyPlus简介与模型建立基础
## EnergyPlus简介
EnergyPlus是一款广泛应用于建筑能
ESP32与Arduino IDE的完美结合:简化开发流程的3大策略
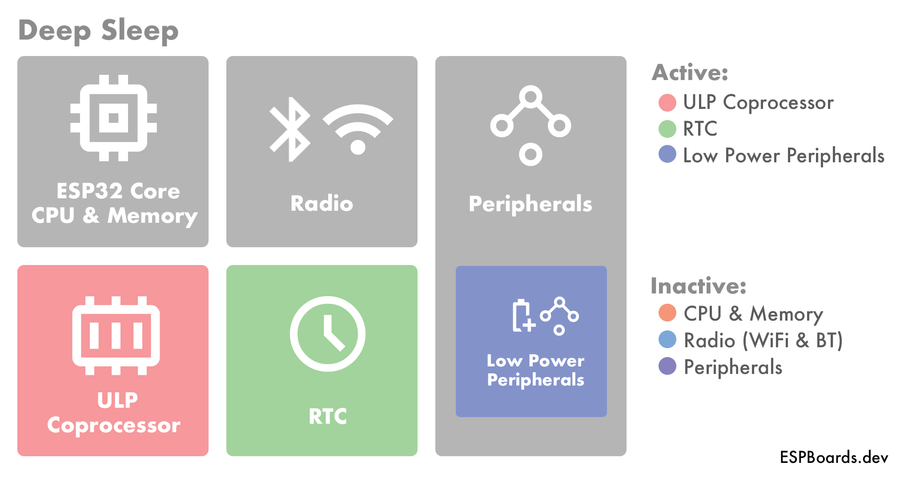
参考资源链接:[esp32_中文技术手册.pdf](https://wenku.csdn.net/doc/645eff63543f8444888a7fae?spm=1055.2635.3001.10343)
# 1. ESP32与Arduino IDE简介
## 1.1 ESP32与Arduino IDE概览
ESP32是Espressif Systems开发的一款低功耗微控制器芯片,它集成了Wi-Fi和蓝牙功能,
【TSMC 0.35um工艺】:提升芯片性能的7大关键策略

参考资源链接:[TSMC 0.35微米工艺库详细技术说明](https://wenku.csdn.net/doc/9tz1kar2fe?spm=1055.2635.3001.10343)
# 1. TSMC 0.35um工艺概述
本章旨在为读者介绍TSMC(台湾半导体制造公司)的0.35微米(um)工艺技术。0.35um工艺是指制程中最小特征尺寸为0.35微米的集成电路制造技术,这是20世纪90
【实操演练】iFix与SQL Server数据同步:一步到位的详细操作手册
参考资源链接:[iFix组态软件实时数据获取与SQL Server存储步骤](https://wenku.csdn.net/doc/6412b762be7fbd1778d4a19f?spm=1055.2635.3001.10343)
# 1. iFix与SQL Server数据同步概述
## 1.1 数据同步的基本
【VHDL细节解析】:打造高性能8位CPU指令集的秘诀
参考资源链接:[VHDL_8位CPU设计_包含程序](https://wenku.csdn.net/doc/6401ad2dcce7214c316ee936?spm=1055.2635.3001.10343)
# 1. VHDL基础与CPU设计概述
在这一章中,我们从VHDL语言的简介开始,它是一种用于描述电子系统的硬件描述语言,广泛应用于FPGA和ASIC设计中。VHDL的语言结构十分
从零开始的IIS配置教程:轻松实现大文件上传支持

参考资源链接:[IIS设置大文件上传:解除30MB限制](https://wenku.csdn.net/doc/6w7fo70mwj?spm=1055.2635.3001.10343)
# 1. IIS基础与架构概览
## 1.1 IIS简介
Internet Information Services (IIS) 是 Microsoft 提供的一套用于Windows Server操作系统的Web服务器软件。IIS支持多种网络协
【3D打印革命】:美的如何将3D打印技术应用于制造业创新
参考资源链接:[美的三年智能制造规划:精益智能工厂与数字化转型策略](https://wenku.csdn.net/doc/74kekgm9f1?spm=1055.2635.3001.10343)
# 1. 3D打印技术简介与制造业变革
## 1.1 3D打印技术的起源与发展
3D打印技术,又称为增材制造,最初起源于20世纪80年代。它是一种通过逐层添加材料来制造三维实体的技术。在过去的几十年中,3D打印已经从一个简单的原
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )