【PelcoD云台控制协议编程接口】:深入解析与应用指南
发布时间: 2024-12-14 19:34:14 阅读量: 1 订阅数: 2 

PelcoD 云台控制协议(完整版).pdf

参考资源链接:[PelcoD云台控制协议官方完整版:扩展命令与高级功能解析](https://wenku.csdn.net/doc/6401abbecce7214c316e9589?spm=1055.2635.3001.10343)
# 1. PelcoD云台控制协议基础
在当前的监控领域,PelcoD云台控制协议扮演了至关重要的角色,它为摄像头云台的操作提供了一套完整的标准和规则。本章节将带您入门PelcoD协议,包括其基本原理、应用场景和它如何帮助您远程控制摄像头云台。
## 1.1 云台控制简介
云台控制是指远程操控摄像头的上下左右移动,以获取最佳监控角度。PelcoD协议是由Pelco公司开发的一种行业标准协议,广泛用于视频监控系统中的云台和摄像机控制。其优点在于通用性和兼容性,能够让不同制造商生产的设备之间通过统一的指令集进行通信。
## 1.2 PelcoD协议的作用
在使用PelcoD协议时,用户可以通过发送特定的控制命令到云台设备,执行各种动作。这些动作包括但不限于:水平旋转、垂直旋转、变焦、聚焦等。PelcoD协议的普及意味着用户无需关心设备品牌,只需使用标准化的指令集,即可实现对云台的精确控制。
通过本章节的学习,您将掌握PelcoD协议的初级概念,并为进一步深入学习协议细节打下坚实的基础。下一章我们将详细探讨PelcoD协议的理论架构,包括其数据帧格式和通信模型。
# 2. ```
# 第二章:PelcoD协议理论架构
## 2.1 协议结构与通信模型
### 2.1.1 PelcoD协议数据帧格式
PelcoD协议定义了一种特定的数据帧格式,用于云台和控制器之间的通信。数据帧主要由以下几个部分构成:
- 开始位:通常使用一个字节表示,标志着数据帧的开始。
- 地址码:定义云台的地址,以便区分不同的设备。
- 控制码:指定发送数据帧的目的,如云台运动控制、参数设置等。
- 数据字段:包含实际的控制数据或参数,例如速度、方向、焦距等。
- 校验和:对前面的数据进行校验,确保数据在传输过程中未被篡改。
下面是一个简化的PelcoD协议数据帧示例:
```plaintext
| 开始位 | 地址码 | 控制码 | 数据字段 | 校验和 |
```
其中,开始位为`0xFF`,地址码为云台的硬件地址,控制码为具体的命令代码,数据字段为命令相关的参数数据,校验和为前三个字段数据异或(XOR)后的结果。
### 2.1.2 通信握手与同步机制
为了确保命令准确无误地送达云台设备,PelcoD协议采用了通信握手机制。这个过程通常包括以下步骤:
1. **初始化通信**:控制器发送一个初始化命令,通知云台准备接收后续指令。
2. **等待应答**:云台收到初始化命令后,返回一个应答信号,表示可以开始正常的指令传输。
3. **指令传输**:控制器发送指令,云台根据指令执行相应动作,如旋转、调整焦距等。
4. **状态反馈**:云台在执行完动作后,向控制器反馈当前状态信息。
同步机制则是通过嵌入特定的同步字节在数据帧中,以防止数据在传输过程中出现错位。PelcoD协议通常使用连续的两个`0xFF`字节作为数据帧的起始同步字节,以确保准确的同步。
## 2.2 控制命令与参数解析
### 2.2.1 云台控制命令集
PelcoD协议定义了丰富的云台控制命令集,包括但不限于以下几个命令:
- **PAN LEFT**:云台向左平移。
- **PAN RIGHT**:云台向右平移。
- **TILT UP**:云台向上倾斜。
- **TILT DOWN**:云台向下倾斜。
- **ZOOM IN**:摄像头变焦(镜头拉近)。
- **ZOOM OUT**:摄像头变焦(镜头拉远)。
每个控制命令都有对应的二进制代码,例如`PAN LEFT`可能对应`0x01`。控制器通过发送这些二进制代码来控制云台的运动。
### 2.2.2 参数设置与执行
除了运动控制命令外,PelcoD协议还支持对云台进行参数设置。例如,可以设置云台运动的最大速度、加速度、减速度等。参数设置同样采用特定的格式,例如:
```plaintext
| 开始位 | 地址码 | 控制码 | 参数1 | 参数2 | ... | 校验和 |
```
在参数设置的命令中,控制码会指定这是一个参数设置命令,随后跟随的参数字段会被云台读取并应用。例如,如果要设置云台的水平旋转速度,控制码后面将跟随一个特定的参数值,云台在接收到该值后会修改其内部的速度设定。
## 2.3 错误检测与异常处理
### 2.3.1 错误代码解析
PelcoD协议中还包含了一套错误代码机制,用于异常情况下的通信恢复策略。当通信过程中出现错误,云台设备会返回一个错误代码给控制器,控制器可以根据这个错误代码判断是何种问题。常见的错误代码包括:
- **0x01**:无效的控制命令。
- **0x02**:无效的参数设置。
- **0x03**:通信超时或设备未响应。
- **0x04**:控制器发送的校验和错误。
### 2.3.2 异常情况下的通信恢复策略
针对可能出现的错误,PelcoD协议提供了一系列的恢复策略:
- **重发指令**:如果检测到通信超时或设备未响应,控制器将重新发送指令。
- **指令确认**:在发送指令后,控制器将等待云台设备的确认信息,确保指令成功执行。
- **参数重置**:如果云台设备返回了无效参数错误,控制器将重新发送正确的参数设置。
- **异常处理回调**:控制器端可实现异常处理回调函数,一旦接收到错误代码,根据错误类型执行相应的处理逻辑。
以上就是PelcoD协议的基础理论架构,下一章我们将会探索如何将这些理论应用到实际的编程实践中。
```
# 3. PelcoD云台控制实践应用
## 3.1 接口编程基础
### 3.1.1 开发环境搭建与配置
在开始编写PelcoD云台控制脚本之前,必须准备适当的开发环境。对于PelcoD协议的应用,通常需要以下工具:
- 编程语言环境:例如C/C++、Python等,以Python为例,需确保Python环境安装正确。
- 相关库:对于网络编程和串口通信,可能需要如`socket`、`serial`等库。
- 开发工具:文本编辑器或集成开发环境(IDE),如Visual Studio Code、PyCharm等。
- 调试工具:网络抓包工具,例如Wireshark,以及串口调试工具。
以下是为Python环境配置开发环境的基本步骤:
1. 确保Python已安装在您的系统中。可以通过在终端运行`python --version`命令来检查Python版本。
2. 安装所需的库,以Python为例,可使用`pip`安装库:
```bash
pip install python-socket pyserial
```
3. 配置您的IDE,以支持代码编辑、自动补全和调试功能。
### 3.1.2 基本的控制脚本编写
编写PelcoD云台控制脚本首先需要了解PelcoD协议的数据包格式。以下是使用Python编写的简单脚本,实现对PelcoD云台的控制。
```python
import socket
# PelcoD协议头定义
HEADER = b'\x00\xFF\x00\xFF'
# 目标IP地址和端口
IP_ADDRESS = '192.168.1.100'
PORT = 23
# 控制命令:左转
CMD_PAN_LEFT = b'\x00\x90\x00\x00\x00\x01\x00\x01\x00\xFF\x00\x00\x00\xFF\x00\x00'
# 控制命令:右转
CMD_PAN_RIGHT = b'\x00\x90\x00\x00\x00\x01\x00\x02\x00\xFF\x00\x00\x00\xFF\x00\x00'
# 初始化socket连接
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.connect((IP_ADDRESS, PORT))
s.send(HEADER + CMD_PAN_LEFT)
time.s
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面介绍 PelcoD 云台控制协议,为监控系统专业人士提供全面的指南。从实战指南到高级教程,涵盖了协议的各个方面,包括实现云台镜头完美控制、优化策略、扩展功能、兼容性分析、编程接口、自动化测试以及与视频分析技术的集成。此外,专栏还探讨了大规模监控项目中 PelcoD 协议的应用策略和实践指南,为监控系统稳定性和效率的提升提供宝贵的见解。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
精通VW 80808-2 OCR错误诊断:快速解决问题的7种方法

参考资源链接:[Volkswagen标准VW 80808-2(OCR)2017:电子元件与装配技术详细指南](https://wenku.csdn.net/doc/3y3gykjr27?spm=1055.2635.3001.10343)
# 1. VW 80808-2 OCR错误诊断概述
在数字化时代,光学字符识别(
LIFBASE性能调优秘笈:9个步骤提升系统响应速度
参考资源链接:[LIFBASE帮助文件](https://wenku.csdn.net/doc/646da1b5543f844488d79f20?spm=1055.2635.3001.10343)
# 1. LIFBASE系统性能调优概述
在IT领域,随着技术的发展和业务需求的增长,系统性能调优逐渐成为保障业务连续性和用户满意度的关键环节。LIFBASE系统作为
【XILINX 7代XADC进阶手册】:深度剖析数据采集系统设计的7个关键点

参考资源链接:[Xilinx 7系列FPGA XADC模块详解与应用](https://wenku.csdn.net/doc/6412
OV426功耗管理指南:打造绿色计算的终极武器
参考资源链接:[OV426传感器详解:医疗影像前端解决方案](https://wenku.csdn.net/doc/61pvjv8si4?spm=1055.2635.3001.10343)
# 1. OV426功耗管理概述
在当今数字化时代,信息技术设备的普及导致了能源消耗的剧增。随着对节能减排的全球性重视,如何有效地管理电子设备的功耗成为了IT行业关注的焦点之一。特别是对于高性能计算设备和嵌入式系统,合理的功耗管理不仅能够降低能源消耗,还能延长设备的使用寿命,提高系统的稳定性和响应速度。OV426作为一款先进的处理器,其功耗管理能力直接影响到整个系统的性能与效率。接下来的章节中,我们将深入
深入探讨:银行储蓄系统中的交易并发控制
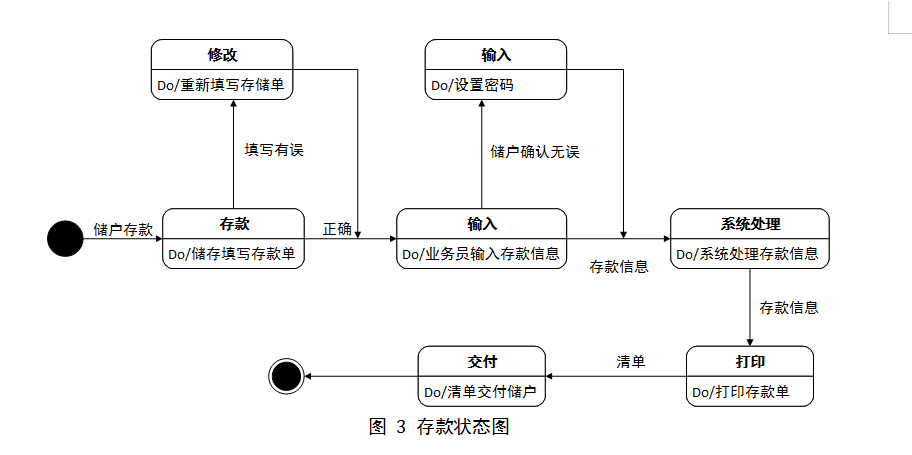
参考资源链接:[银行储蓄系统设计与实现:高效精准的银行业务管理](https://wenku.csdn.net/doc/75uujt5r53?spm=1055.2635.3001.10343)
# 1. 银行储蓄系统的并发问题概述
## 1.1 并发访问的必要性
在现代银行业务中,储蓄系统的并发处理是提高交易效率和用户体验的关键。随着在线交易量的增加,系统需要同时处理来自不同客户和分支机构的请求。并发访问确保了系统能够快速响应,但同时也带来了数
【HyperMesh材料属性至边界条件】:打造精准仿真模型的全路径指南

参考资源链接:[Hypermesh基础操作指南:重力与外力加载](https://wenku.csdn.net/doc/mm2ex8rjsv?spm=105
【热管理高手进阶】:Android平台下高通与MTK热功耗深入分析及优化
参考资源链接:[Android高通与MTK平台热管理详解:定制Thermal与架构解析](https://wenku.csdn.net/doc/6412b72dbe7fbd1778d495e3?spm=1055.2635.3001.10343)
# 1. Android热管理基础与挑战
在当今的移动设备领域,Andr
【DS-K1T673误识率克星】:揭秘误差分析及改善策略

参考资源链接:[海康威视DS-K1T673系列人脸识别终端用户指南](https://wenku.csdn.net/doc/5swruw1zpd?spm=1055.2635.3001.10343)
# 1. 误差分析与改善策略的重要性
## 1.1 误差在IT领域的普遍性
在IT行业,数据和系统准确性至关重要。误差,无论是人为的还是技术上的,都可能导致重大的问题,如系统故障、数据失真和决策
【PADS Layout专家速成】:7步掌握覆铜技术,优化电路板设计
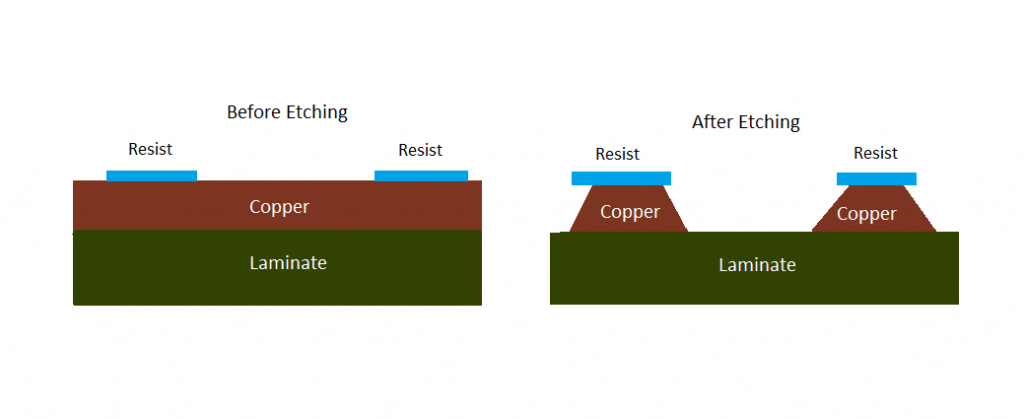
参考资源链接:[PADS LAYOUT 覆铜操作详解:从边框到填充](https://wenku.csdn.net/doc/69kdntug90?spm=1055.2635.3001.10343)
# 1. 覆铜技术概述
在现代电子设计制造中,覆铜技术是构建电路板核心的一环,它不仅涉及基础的电气连接,还包括了信号完整性、热管理以及结构稳定性等多方面考量
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )