【外围设备集成】:ESP32最小系统外围设备集成与扩展性探讨
发布时间: 2024-11-29 18:56:21 阅读量: 5 订阅数: 6 

参考资源链接:[ESP32 最小系统原理图.pdf](https://wenku.csdn.net/doc/6401abbbcce7214c316e94cc?spm=1055.2635.3001.10343)
# 1. ESP32概述与最小系统构成
ESP32是Espressif Systems推出的一款低成本、低功耗的系统级芯片,内置Wi-Fi和蓝牙功能,适用于物联网(IoT)应用。本章将概述ESP32的核心特性,并详细介绍构成ESP32最小系统的必要组件。
## 1.1 ESP32核心特性解析
ESP32采用Tensilica 32位双核处理器,具有丰富的外设接口和灵活的功耗管理能力,它的主要特性包括:
- 双核Tensilica LX6处理器,工作频率高达240 MHz
- 内置Wi-Fi (802.11 b/g/n) 和蓝牙4.2功能,支持经典蓝牙和低功耗蓝牙(BLE)
- 2.4 GHz频段天线支持,带有520 KB SRAM
## 1.2 最小系统构成
一个ESP32最小系统通常包括以下几个部分:
- ESP32核心模块
- 电源模块,一般为USB供电或电池供电
- 下载和调试接口,如3.3V的串口和ESP-PROG编程器
- 必要的外围电路,如晶振电路、复位电路和电源指示灯
通过最小系统的搭建,我们可以为后续深入学习和开发ESP32打下基础。以下是构建ESP32最小系统所需的连接示意:
```mermaid
flowchart LR
USB[USB供电] --> ESP32[ESP32核心模块]
3.3V[3.3V电源] --> ESP32
GND[GND] --> ESP32
TX[串口TX] --> RX[ESP32 RX]
RX[串口RX] --> TX[ESP32 TX]
RST[复位按钮] --> ESP32
IO[IO口] --> 电路[外围电路]
晶振[晶振] --> ESP32
```
在本章中,我们了解了ESP32的基础知识以及如何搭建一个简单的最小系统。第二章我们将进一步探索ESP32的外围设备基础集成,包括GPIO控制、模拟输入输出和定时器与中断等。
# 2. ESP32外围设备基础集成
### 2.1 ESP32的GPIO控制
GPIO(通用输入/输出)引脚是微控制器与外部世界的连接接口,它们可以被配置为输入或输出状态,用于读取传感器数据、控制LED灯的亮灭、或者驱动马达等。ESP32有多个GPIO引脚,为开发人员提供了丰富的控制选项。
#### 2.1.1 GPIO的工作模式及配置
ESP32的每个GPIO引脚都可以独立配置为输入、输出或特殊功能。引脚模式的配置是通过编程实现的。对于输入模式,可以进一步配置为上拉、下拉或浮空输入;对于输出模式,可以设置为开漏或推挽输出。
下面是一个简单示例,展示如何在Arduino IDE中配置ESP32的GPIO为输出模式:
```cpp
const int pin = 2; // 定义GPIO引脚编号
void setup() {
pinMode(pin, OUTPUT); // 设置GPIO为输出模式
}
void loop() {
digitalWrite(pin, HIGH); // 设置GPIO引脚为高电平
delay(1000); // 等待1秒
digitalWrite(pin, LOW); // 设置GPIO引脚为低电平
delay(1000); // 等待1秒
}
```
在上面的代码中,`pinMode`函数用于配置指定引脚为输出模式,`digitalWrite`函数用来改变引脚的电平状态,`HIGH`和`LOW`分别代表高电平和低电平。
#### 2.1.2 GPIO的输入输出应用实例
下面以一个简单的LED闪烁为例,展示如何使用ESP32的GPIO引脚来控制一个LED灯。在这个例子中,我们将配置一个GPIO引脚为输出模式,通过代码来控制LED的亮灭。
```cpp
const int ledPin = 2; // 定义连接LED的GPIO引脚
const int buttonPin = 0; // 定义连接按钮的GPIO引脚
int ledState = LOW; // 当前LED状态
unsigned long previousMillis = 0; // 上一次切换LED状态的时间
const long interval = 1000; // 两次状态切换间隔(毫秒)
void setup() {
pinMode(ledPin, OUTPUT); // 设置LED引脚为输出模式
pinMode(buttonPin, INPUT_PULLUP); // 设置按钮引脚为输入模式,并启用内部上拉电阻
}
void loop() {
unsigned long currentMillis = millis(); // 获取当前时间
// 检查是否到达切换状态的时间
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis; // 保存当前时间为下一次切换时间
// 改变LED状态
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState); // 设置LED引脚的电平
}
}
```
在本代码中,`millis()`函数用于获取系统启动后经过的毫秒数。通过比较当前时间与上一次状态切换时间的差值,我们决定是否切换LED的状态。这种机制称为"非阻塞延时",可以有效地避免阻塞程序的其他部分。
### 2.2 ESP32的模拟输入输出
ESP32具有ADC(模拟数字转换器)和DAC(数字模拟转换器)功能,能够实现模拟信号的输入输出,使得ESP32不仅可以处理数字信号,也可以与模拟传感器和执行器进行交互。
#### 2.2.1 ADC和DAC的工作原理
ADC将模拟信号转换为数字信号,ESP32内置多个ADC通道,可以用于读取不同类型的模拟传感器数据。DAC则执行相反的操作,将数字信号转换为模拟信号,从而驱动模拟设备。
在ESP32中,ADC的分辨率一般为12位,这意味着它可以将模拟信号分为4096(2^12)个不同的值。DAC的输出一般在0到3.3V之间。
以下是如何在Arduino IDE中读取ADC值的代码示例:
```cpp
const int analogInPin = 34; // ESP32 ADC1引脚34
void setup() {
Serial.begin(115200); // 初始化串口通信
}
void loop() {
int sensorValue = analogRead(analogInPin); // 读取ADC引脚的值
Serial.println(sensorValue); // 输出读取到的值
delay(1000); // 等待1秒
}
```
在这段代码中,`analogRead`函数用于读取指定ADC引脚的模拟值,并通过串口输出。
### 2.3 ESP32的定时器与中断
定时器是ESP32的重要组成部分,它用于生成精确的时间间隔和触发中断。中断可以暂停程序当前的执行流程,并响应某些事件,如外部信号的变化或定时器计时完成。
#### 2.3.1 定时器的配置与应用
ESP32的定时器可以配置为不同的模式,包括单次模式和周期模式。使用定时器可以实现精确的延时和周期性任务的执行。
下面是一个使用定时器触发中断的Arduino代码示例:
```cpp
hw_timer_t *timer = NULL;
portMUX_TYPE timerMux = portMUX_INITIALIZER_UNLOCKED;
void IRAM_ATTR onTimer() {
portENTER_CRITICAL_ISR(&timerMux);
// 在此处执行中断任务...
portEXIT_CRITICAL_ISR(&timerMux);
}
void setup() {
Serial.begin(115200);
// 创建一个硬件定时器实例
timer = timerBegin(0, 80, true); // 参数分别为定时器编号、预分频系数、计数方向
// 定义中断服务程序
timerAttachInterrupt(timer, &onTimer, true);
// 设置定时器周期,这里设置为1秒
timerAlarmWrite(timer, 1000000, true);
// 启动定时器
timerAlarmEnable(timer);
}
void loop() {
// 主循环保持空,所有的工作在中断服务程序中完成
}
```
在该示例中,使用`timerBegin`函数初始化定时器,并用`timerAttachInterrupt`函数将中断服务程序绑定到定时器上。通过`timerAlarmWrite`设置定时器周期,最后用`timerAlarmEnable`启动定时器。
#### 2.3.2 中断服务程序的设计与调试
设计中断服务程序时,需要特别注意其执行速度,避免在其中执行复杂的逻辑操作。在中断服务程序中,只能访问被标记为`IRAM_ATTR`的函数和变量。由于中断可能会在任何时刻发生,因此应尽量避免使用会导致阻塞的函数。
中断服务程序中,通常会使用临

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Vcomputer存储软件性能监控】:实时跟踪和优化存储性能的12个策略
参考资源链接:[桂林电子科大计算机教学辅助软件:Vcomputer软件包](https://wenku.csdn.net/doc/7gix61gm88?spm=1055.2635.3001.10343)
# 1. 存储软件性能监控概述
随着企业数据量的急剧膨胀,存储软件性能监控变得日益重要。本章将对存储性能监控进行简要概述,引入监控的概念,并为读者揭示监
日立电子扫描电镜的电子光学系统详解:彻底了解原理与操作
参考资源链接:[日立电子扫描电镜操作指南:V23版](https://wenku.csdn.net/doc/6412b712be7fbd1778d48fb7?spm=1055.2635.3001.10343)
# 1. 日立电子扫描电镜概述
日立电子扫描电镜(Scanning Electron Microscope, SEM)是利用聚焦的高能电子束扫描样品表面,以获得样品表面形貌和成分信息的仪器。它具有卓越的分辨率,可以达到纳米级别的成像,因此在
【Symbol LS2208无线通信优化指南】:提高无线扫描枪性能的秘诀
参考资源链接:[Symbol LS2208扫描枪设置详解与常见问题解决方案](https://wenku.csdn.net/doc/6412b67ebe7fbd1778d46ec5?spm=1055.2635.3001.10343)
# 1. 无线通信基础与无线扫描枪概述
## 1.1 无线通信的演化
无线通信技术自20世纪初开始发展以来,已经历了从简单的无线电报到当前的4G、5G网络的巨大飞跃。每一阶段的变革都是基于更高频段、更先进调
【用户需求保障】:Fluent中文帮助文档的用户测试与反馈循环
参考资源链接:[ANSYS Fluent中文帮助文档:全面指南(1-28章)](https://wenku.csdn.net/doc/6461921a543f8444889366dc?spm=1055.2635.3001.10343)
# 1. Fluent中文帮助文档概述
在数字化时代,软件产品的帮助文档成为用户获取信息和解决问题的重要来源。Flue
ECU开发中的SENT协议应用:软件设计与优化要点大揭秘
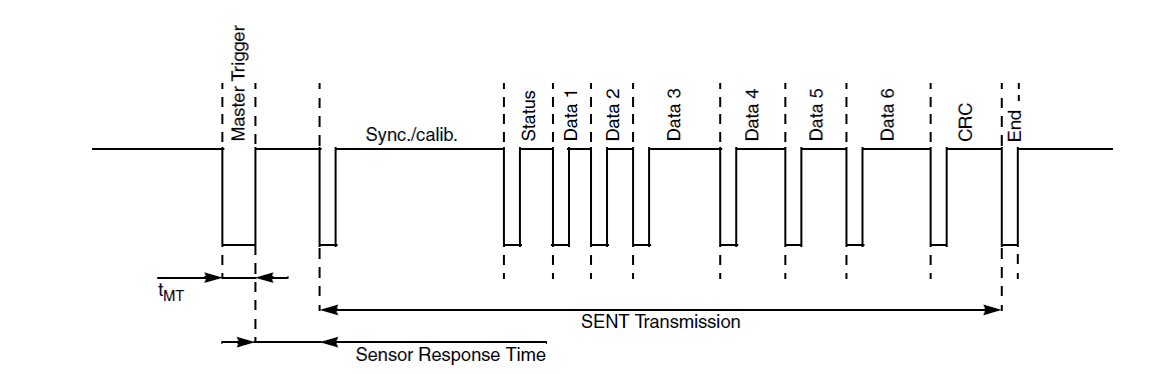
参考资源链接:[SAE J2716_201604 (SENT协议).pdf](https://wenku.csdn.net/doc/6412b704be7fbd1778d48caf?spm=1055.2635.3001.10343)
# 1. SENT协议简介及其在ECU开发中的作用
SENT(Single Edge Nibble Transmission)协议是一
【外围设备集成】:ESP32最小系统外围设备集成与扩展性探讨

参考资源链接:[ESP32 最小系统原理图.pdf](https://wenku.csdn.net/doc/6401abbbcce7214c316e94cc?spm=1055.2635.3001.10343)
# 1. ESP32概述与最小系统构成
ES
74LS90与可编程逻辑设备的比较分析:优势、局限及选择指南

参考资源链接:[74LS90引脚功能及真值表](https://wenku.csdn.net/doc/64706418d12cbe7ec3fa9083?spm=1055.2635.3001.10343)
# 1. 74LS90与可编程逻辑设备基础
在数字电子设计领域,理解基本组件和可编程逻辑设备的概念是至关重要的。本章旨在为读者提供74LS90这种固定功
模拟电路设计者的必备宝典:拉扎维习题答案与系统集成之道
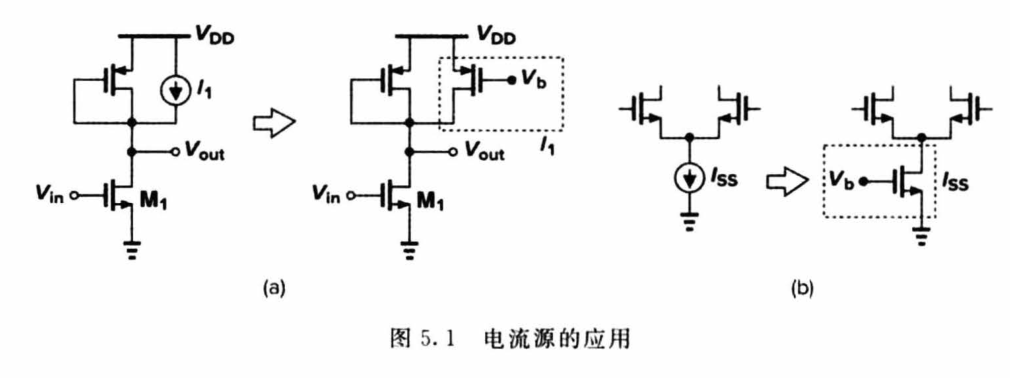
参考资源链接:[拉扎维《模拟CMOS集成电路设计》习题答案(手写版)
](https://wenku.csdn.net/doc/6412b76dbe7fbd1778d4a42f?spm=1055.2635.3001.10343)
# 1. 拉扎维模拟电路理论基础回顾
## 理论框架概述
在深入了解拉扎维的模拟电路习题之前,必须首先回顾模拟电路理论的基础知识。本章节将探讨模拟电
【SKTOOL软件自动化测试案例分析】:构建高效测试工作流的必备教程
参考资源链接:[显控SKTOOL:HMI上位软件详解与操作指南](https://wenku.csdn.net/doc/644dbaf3ea0840391e683c41?spm=1055.2635.3001.10343)
# 1. 软件自动化测试基础
自动化测试是提高软件开发效率和质量的关键技术之一。在本章中,我们将深入探讨自动化测试的基本概念,包括其定义
阿里巴巴Java多线程与并发控制:规范引导下的性能优化与问题解决
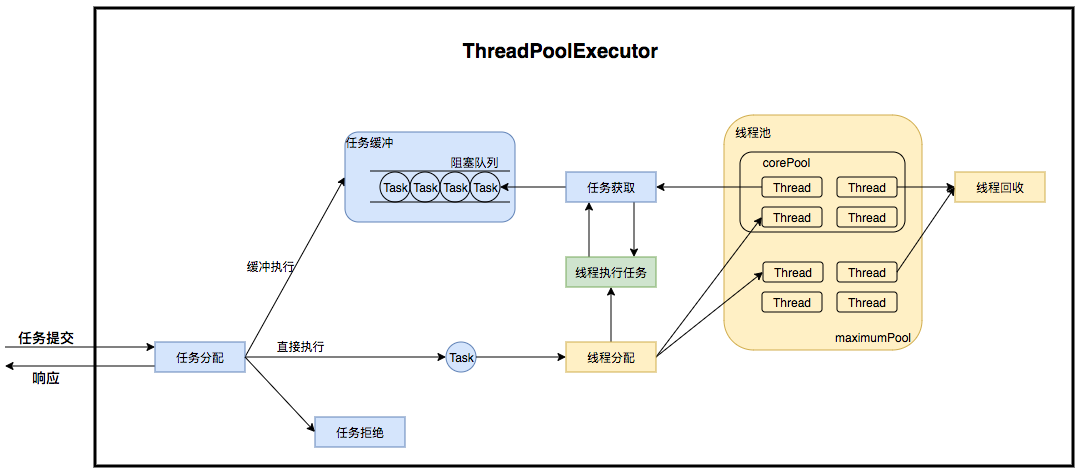
参考资源链接:[阿里巴巴Java编程规范详解](https://wenku.csdn.net/doc/646dbdf9543f844488d81454?spm=1055.2635.3001.10343)
# 1. Java多线程基础和并发模型
Java多线程编程是构建高效、可伸缩应用程序的关键技术之一。在本章中,我们将探索Java多线程的基础知识和并发模型的原理,为深入理解后续章节的高级概念打下坚实的基础。
## 1.1 Java多线程基础
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )