C语言实现I2C多主模式:冲突处理与通信稳定性提升(高级技巧)
发布时间: 2024-12-11 15:16:56 阅读量: 9 订阅数: 11 

i2c.rar_51 I2C
# 1. C语言与I2C多主模式概述
在现代电子系统设计中,I2C(Inter-Integrated Circuit)作为一种常用的串行通信协议,因其简单、高效、成本低的特点被广泛应用。尽管I2C通信通常采用主从模式,但多主模式提供了在多个主控制器之间共享同一物理I2C总线的能力,极大地增加了设计的灵活性。本章将概述C语言与I2C多主模式的基本概念,并为后续章节的深入探讨奠定基础。
I2C多主模式允许多个主设备同时初始化数据传输,这需要复杂的逻辑来处理可能发生的地址冲突和数据冲突。在硬件层面上,I2C总线上的设备通过物理地址来识别,而在软件层面上,C语言为开发者提供了操作I2C设备的丰富接口。使用C语言实现I2C多主模式时,开发者需要理解I2C协议的工作原理以及如何在代码中准确地处理总线竞争和冲突。
本章将介绍I2C协议的基础知识,包括其数据传输机制和地址机制,并将探索多主模式与传统的主从模式之间的区别。通过本章的学习,读者将对I2C多主模式有一个全局的认识,并为更深入地掌握这一技术打下坚实的基础。
# 2. 深入理解I2C协议与多主模式
### I2C协议基础
#### I2C协议框架和时序
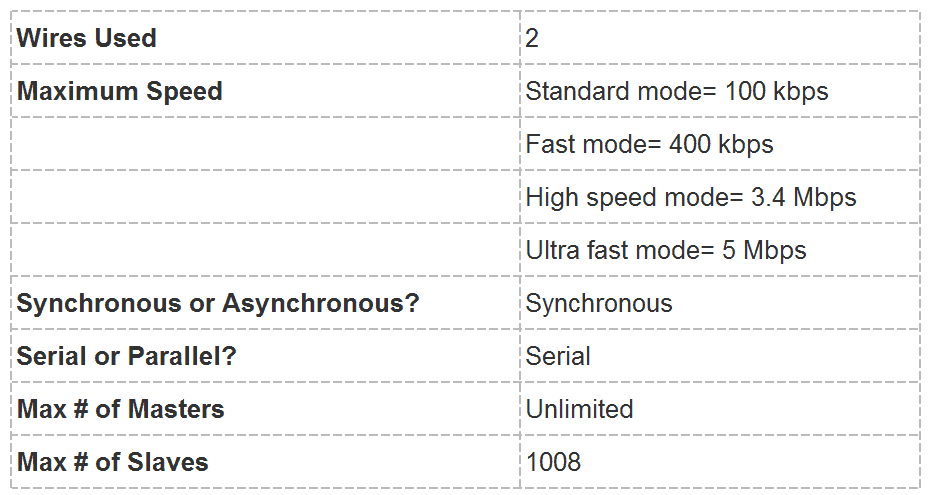
I2C(Inter-Integrated Circuit)是一种多主机的串行通信协议,广泛应用于微控制器(MCU)与各种外围设备之间的数据传输。I2C协议使用两条线路进行数据交换:串行数据线(SDA)和串行时钟线(SCL)。数据在SDA线上串行传输,而SCL线提供时钟信号同步数据传输。
I2C通信过程可以分为三个主要阶段:启动条件、数据传输和停止条件。
- **启动条件**:当SDA从高电平变为低电平,同时SCL保持高电平时,会形成I2C启动条件。
- **数据传输**:数据以字节为单位在SDA线上逐位传输。每个字节后面跟随一个ACK(应答)或NACK(非应答)信号。
- **停止条件**:当SDA从低电平变为高电平,同时SCL保持高电平时,会形成I2C停止条件。
在数据传输阶段,传输的每个字节都需要一个时钟周期来同步。SCL线上的时钟脉冲用来定义数据的有效期和稳定期,确保数据在稳定期被接收端正确读取。
```mermaid
sequenceDiagram
participant 主机
participant 从机
Note over 主机,从机: 启动条件
主机->>从机: 发送地址和读/写方向位
Note over 主机,从机: 数据传输
主机->>从机: 发送数据字节
主机->>从机: 接收ACK/NACK
主机->>从机: 发送停止条件
```
#### I2C数据传输和地址机制
I2C通信中,每个设备都有一个唯一的7位或10位地址。设备地址是通信开始时发送的第一个字节的一部分,紧接着是读/写方向位(R/W bit),用于指示主机希望进行读操作还是写操作。
- **地址机制**:在多主模式下,每个主机都需要具备一套地址机制,确保在启动通信前能够获取到从设备的可用地址,并且在多个主机尝试与同一从设备通信时,能够协调地址冲突。
- **地址分配**:通常情况下,从设备的地址由制造商预设,而多主模式下的地址分配则需要更加灵活,通常通过软件进行动态管理。
### I2C多主模式的工作原理
#### 多主模式与主从模式的区别
I2C协议标准支持主从模式(Master-Slave)和多主模式(Multi-Master)两种工作方式。在主从模式中,一个主机控制总线上所有从设备,而在多主模式下,允许多个主机设备交替控制总线。
- **主从模式**:这种方式下,主机设备启动通信,生成时钟信号,并且始终主导数据传输的过程。
- **多主模式**:在这种工作模式中,多个主机可以尝试控制总线,当两个或两个以上的主机同时尝试通信时,I2C协议规定了仲裁机制来解决总线控制权的冲突。
#### 冲突检测与仲裁过程
在多主模式中,冲突检测和仲裁过程是确保数据完整性的关键机制。
- **冲突检测**:当一个主机开始通信时,它会监控SDA线的状态。如果检测到SDA线在预期的高电平状态时实际上是低电平,表明另一个主机正在使用总线,此时将发生冲突。
- **仲裁过程**:当冲突发生时,协议规定正在发送的主机必须停止发送数据,并在解决冲突后重新尝试。这个过程确保了总线的控制权能够被有效地分配给其中一个主机。
### 通信稳定性的重要性
#### 通信错误的类型与影响
通信错误主要分为两类:突发错误和持续错误。
- **突发错误**:通常是由于瞬时噪声或干扰引起的,可能会导致一次数据传输失败,但通常不会影响后续通信。
- **持续错误**:可能是由于设备硬件故障或总线不稳定性引起的,这类错误会影响通信的连续性和可靠性。
无论哪种错误,都会对系统性能产生负面影响。因此,设计通信系统时必须考虑错误检测和纠正机制,以保证数据的准确传输。
#### 提升通信稳定性的设计原则
提升I2C通信稳定性需要遵循一定的设计原则:
- **冗余**:通过引入冗余机制,例如重复发送数据或使用校验和,来检测和纠正传输中的错误。
- **速率调整**:根据通信环境和质量,动态调整数据传输速率,以避免因速率过高导致的错误。
- **错误检测与处理**:实施有效的错误检测和处理机制,确保通信失败时能够迅速恢复。
通过这些原则,可以最大限度地减少通信错误,并提高系统的稳定性和可靠性。
# 3. C语言在I2C多主模式中的应用实践
在第二章中,我们深入探讨了I2C协议的基础知识和多主模式的内在机制。现在,我们将进一步讨论如何在实践中运用C语言来实现I2C多主模式,以及如何通过各种技巧来优化和提升通信的稳定性和效率。
## 3.1 C语言实现I2C多主通信的框架
I2C多主通信的实现涉及硬件初始化、设备地址分配、数据传输以及冲突检测等多个方面。C语言因其接近硬件的特性,在处理这些底层细节上具有独特的优势。
### 3.1.1 初始化和配置I2C接口
首先,我们需要初始化I2C硬件接口。这通常包括设置I2C速度模式(标准、快速或高速)、配置I/O引脚、设置总线时钟频率以及使能I2C模块。
```c
/* 示例代码:初始化I2C接口 */
void I2C_Init(I2C_TypeDef* I2Cx, uint32_t clockSpeed) {
/
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 C 语言中广泛使用的 I2C 和 SPI 通信协议。它涵盖了从基础概念到高级优化策略的各个方面,包括:
* I2C 和 SPI 协议的原理和实现
* 优化 I2C 通信以提高嵌入式系统性能
* 掌握 SPI 通信的主从模式
* I2C 和 SPI 协议的对比分析,以打造高效的嵌入式系统
* 集成和测试 I2C 和 SPI 通信协议的实用教程
* C 语言下 I2C 通信性能调优策略
* I2C 和 SPI 在物联网中的应用案例分析
* C 语言实现 I2C 多主模式,以提升通信稳定性
* 深入分析 SPI 通信的时序,并提供优化技巧
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【SIPP基础操作指南】:手把手教你使用SIPP进行测试(从零开始)

参考资源链接:[Maple软件基础操作指南:注释与计算](https://wenku.csdn.net/doc/17z6cduxsj?spm=1055.2635.3001.10343)
# 1. SIPP简介和安装配置
## 1.1 SIPP概述
SIPp 是一个开源的测试工具,专门用于发起和处
CST旋转体仿真:掌握精确模拟与分析的5大技巧
参考资源链接:[CST建模教程:如何绘制旋转椭球体](https://wenku.csdn.net/doc/6401ac12cce7214c316ea870?spm=1055.2635.3001.10343)
# 1. CST仿真软件概述
CST Studio Suite是电磁仿真软件领域的佼佼者,广泛应用于雷达、天线、高频电路、电磁兼容(EMC)等领域。本章旨在为读者提供一个关于CST软
移动开发黎明纪实:iOS与Android,开启移动革命的钥匙
参考资源链接:[不吹牛-庚寅年2010年第一期教材690页.pdf](https://wenku.csdn.net/doc/6412b722be7fbd1778d4935d?spm=1055.2635.3001.10343)
# 1. 移动开发的起源与兴起
## 1.1 移动开发的历史回顾
在移动互联网的浪潮中,移动开发从早期的功能手机时代发展到如今的智能手机全盛时期。最初的移动应用多为静态的信息展示和基础交互,随着技术的发展,移动应用逐渐整合了更多的功能,比如音频、视频播放,复杂的用户界面(UI)以及云服务的接入。
## 1.2 移动操作系统的竞争
移动开发的兴起离不开两大主流操作系统的
G7SA安全继电器安装指南:一步到位的安装与故障排除秘籍
参考资源链接:[欧姆龙安全继电器单元G7SA系列产品介绍](https://wenku.csdn.net/doc/6463338e5928463033bdab89?spm=1055.2635.3001.10343)
# 1. G7SA安全继电器概述
## 1.1 安全继电器的定义与重要性
安全继电器是工业控制系统中的关键安全设备,用于监控和控制机械设备的安全功能。G7SA安全继电器是其中的代表型号,它具有高性能和可靠性,能够在紧急情况下快速切断电源,保护人员和设备的安全。在工业自动化领域,安全继电器是确保生产过程安全、符合法规要求的必备设备。
## 1.2 G7SA安全继电器的核心优势
G
WinCC VBS性能优化:提升脚本运行效率的关键技巧
参考资源链接:[wincc vbs手册中文](https://wenku.csdn.net/doc/6412b756be7fbd1778d49eef?spm=1055.2635.3001.10343)
# 1. WinCC VBS基础和脚本编写
## 1.1 WinCC VBS概述
WinCC(Windows Control Center)是西门子公司推出的一
【SPiiPlus MMI编程接口详解】:轻松集成与自定义,实现技术飞跃
参考资源链接:[2020 SPiiPlus MMI应用工作室用户指南(v3.02)](https://wenku.csdn.net/doc/6v6i2rq0ws?spm=1055.2635.3001.10343)
# 1. SPiiPlus MMI编程接口概览
在现代工业自动化领域中,SPiiPlus MMI编程接口扮演着至关重要的角色,它为用户提供了与自动化设备进行交互的平台,通过这个接口可以实现对设备的监控和控制。本章将为读者提供一个关于SPiiPlus MMI编程接口的全面概览,以便为后续章节的详细讨论打下坚实的基础。
## 1.1 接口的核心价值
SPiiPlus MMI编程接口的
【美的智能制造的终极攻略】:掌握数据驱动决策,优化生产流程

参考资源链接:[美的三年智能制造规划:精益智能工厂与数字化转型策略](https://wenku.csdn.net/doc/74kekgm9f1?spm=1055.2635.3001.10343)
# 1. 数据驱动决策的力量
在当今这个快速变化的商业环境中,数据驱动决策已成为提升企业竞争力的
深入掌握iFix数据架构:专家解读高效数据传输到SQL Server技巧
参考资源链接:[iFix组态软件实时数据获取与SQL Server存储步骤](https://wenku.csdn.net/doc/6412b762be7fbd1778d4a19f?spm=1055.2635.3001.10343)
# 1. iFix数据架构概述
## 1.1 iFix数据架构简介
iFix数据
Conformal ECO流程与设计自动化
参考资源链接:[揭秘Conformal ECO流程:关键步骤与命令详解](https://wenku.csdn.net/doc/6r74x366qb?spm=1055.2635.3001.10343)
# 1. Conformal ECO流程概述
## 1.1 ECO流程简介
ECO(Engineering Change Order)流程是集成电路设计与制造中的关键步骤,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )