ABB机器人转台控制系统与故障排查
需积分: 19 48 浏览量
更新于2024-08-05
收藏 2.95MB DOCX 举报
该文档详细介绍了ABB机器人的转台相关问题,包括控制柜内的关键元器件布局、转台的动作方式、可能出现的报警及排查方法,以及相关报警代码的解读。
一、控制柜元器件布局与功能
在ABB机器人的转台系统中,控制柜内包含以下关键组件:
1. 接触器:负责控制转台伺服电机的电源通断,直接影响转台的启动和停止。
2. 抱闸继电器:用于控制电机的抱闸装置,确保在非工作状态下转台不会自由旋转。
3. 轴计算模块:接收主计算机的运动指令,处理来自串行测量(SMB)的位置反馈信号,生成驱动转台运动的指令给驱动单元。
二、转台动作方式
1. 小转台STN1和STN2:启动时对应的接触器吸合,停止则断开,分别控制两个小转台的旋转。
2. 大转台INTERCH:启动时STN1、STN2和INTERCH三个接触器同时吸合,停止时同时断开。同时,对应的抱闸继电器也会同步动作。
三、故障排查与案例
针对大转台INTERCH在运行中可能出现的报警,可以采取以下排查步骤:
1. 检查接触器的动作一致性,看是否有延迟或滞后现象。
2. 单独操作大转台,观察抱闸继电器端子指示灯的闪烁情况,判断其工作状态。
3. 在自动模式下,观察接触器和继电器的工作频次,找出可能的问题环节。
4. 遇到报警时,查看硬件报警信息,结合轴计算模块错误,辅助定位故障源。
四、报警代码解读
1. 驱动模块:指控制柜,主柜编号为驱动模块1,如有从柜,依次为2、3、4。
2. 单位位置:每个柜内的驱动位置,主驱动为1,外轴驱动如从左至右依次为3、4、5。
3. 节点:驱动上的输出口,对应不同的设备或功能。
4. INTERCHPLATE1和INTERCHPLATE2:通常涉及转台与AB面变位机的组合。
5. SIN1和SIN2:分别对应小转台的A面和B面。
五、典型报警及其原因和对策
1. 转台停留位置不一致,出现偏差:可能由于机械精度、伺服控制或反馈系统问题导致。处理对策包括校准位置、检查连接线路、调整控制系统参数。
总结,ABB机器人转台系统的正常运行依赖于精确的控制策略和有效的故障排查。理解控制柜内部结构、转台动作逻辑、报警代码含义以及故障排查方法对于维护和优化系统至关重要。遇到问题时,应依据提供的信息逐步分析,确保机器人系统高效稳定运行。
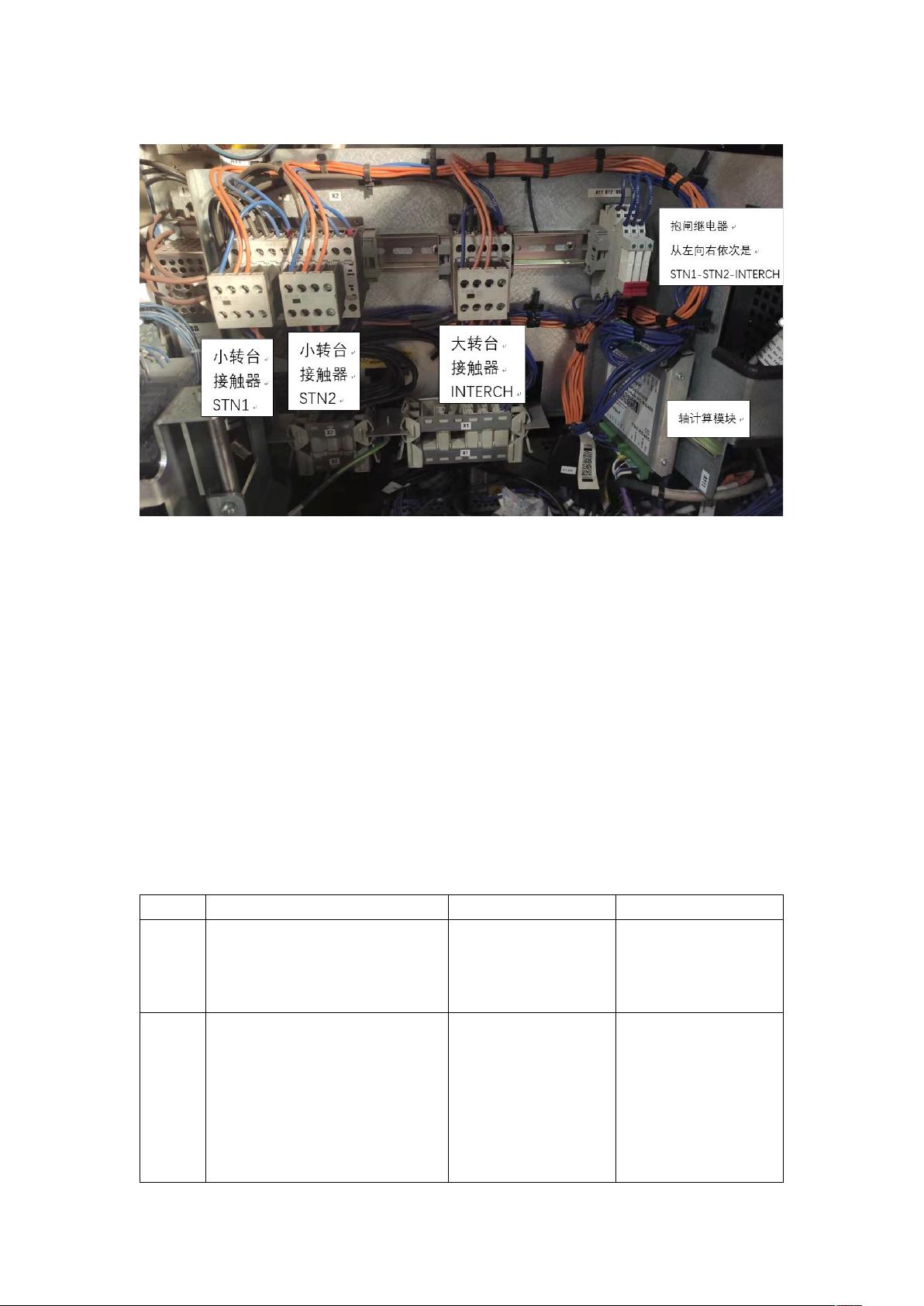
一、控制柜内转台相关元器件布局如下图
接触器:控制转台的伺服电机的电源供给;
抱闸继电器:控制电机的抱闸;
轴计算模块:用于接收主计算机的运动指令和串行测量(SMB)的工业机器人位置反馈信
号,然后发出驱动工业机器人运动的指令给驱动单元模块;
二、动作方式
小转台 STN1 功能启动时 STN1 接触器吸合,停止时小转台 STN1 接触器断开;
小转台 STN2 功能启动时 STN2 接触器吸合,停止时小转台 STN2 接触器断开;
大转台 INTERCH 功能启动时 STN1,STN2,INTERCH 三个接触器同时吸合,停止时
STN1,STN2,INTERCH 三个接触器同时断开;
抱闸继电器的动作方式同接触器(小转台动作单个抱闸继电器,大转台动作 3 个抱闸继电
器);
(转台手动和自动时都适用)
三、相关报警总结
序号 报警内容和现象 实际可能原因 处理对策
1
转台每次停留位置出现不一致,出现偏差,
工艺频繁调整焊道,通过划线标记,确定每
次旋转后位置有偏差;
1. 对应转台的抱闸继电器
松动或损坏;
1. 更换抱闸继电器;
2. 更换抱闸继电器端子;
2
报警代码:50056
关节碰撞
说明:低速或者零速时,对关节 INTERCH
PLATE1 施加的实际转矩大于指令要求值;
1. 转台实际运动过程中是
否发生碰撞;
2. 转台抱闸继电器问题;
3. 转台轴计算模块问题;
1. 检查转台实物是否发生
碰撞;
2. 排查或更换对应转台抱
闸继电器和端子;
3. 排 查 或 更 换 轴 计 算 模
块;
下载后可阅读完整内容,剩余3页未读,立即下载
2022-06-30 上传
2020-04-29 上传
2023-05-25 上传
2021-10-05 上传
2023-07-11 上传
2023-04-03 上传
2022-06-30 上传
2021-04-20 上传
2022-06-30 上传

哪怕它真理无穷进一步有进一步的欢喜
- 粉丝: 735
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
