跨视点聚类滤波提升压缩多视深度图质量
180 浏览量
更新于2024-08-26
收藏 1.21MB PDF 举报
"多视深度图压缩中的基于聚类的跨视点滤波"
这篇研究论文主要探讨了在多视视频编码领域中,如何通过一种基于聚类的跨视点滤波(CBF)方法来提升压缩后的多视深度图的质量。多视深度图与视频结合是一种重要的数据格式,但它通常会受到量化误差的影响,导致在生成虚拟视图时出现明显的失真和艺术效果。针对这一问题,作者提出了一种创新的方案。
在该方案中,首先,重建的深度信息从不同视角映射过来,这种跨视点的信息有助于优化滤波过程。然后,在对某一视角的深度图进行滤波时,会选取当前及相邻视角的非局部候选信息。具体来说,论文可能涉及到以下几个关键知识点:
1. 多视深度图:这是一种记录多个不同视角下同一场景深度信息的数据结构,常用于虚拟视图的生成和立体视觉应用。
2. 量化误差:在深度图压缩过程中,由于有限的比特率,原始深度信息会被近似表示,导致量化误差,进而影响重构图像的质量。
3. 跨视点映射:利用相邻视角的深度信息,可以补充和修正目标视点的深度图,减少量化误差导致的失真。
4. 基于聚类的滤波:论文提出的CBF方法可能涉及将深度图像素分组或聚类,然后在每个集群内应用特定的滤波策略,以减小视点间的不一致性。
5. 非局部信息:在滤波过程中,不仅考虑局部邻近像素,还引入了非局部的当前视点和相邻视点的深度信息,这可能有助于捕捉更广泛的上下文信息,提高滤波效果。
6. 虚拟视图渲染:通过多视深度图,可以合成未被实际捕获的新视图,而高质量的深度图对于渲染过程至关重要,减少失真能提升用户体验。
7. 滤波优化:滤波算法的设计和优化是论文的核心,它可能涉及到不同的滤波器类型(如均值滤波、中值滤波、自适应滤波等)以及优化策略,以在计算复杂度和性能之间找到平衡。
8. 性能评估:论文可能会用到各种图像质量评估指标,如峰值信噪比(PSNR)、结构相似度指数(SSIM)等,以验证所提方法的有效性。
这篇论文为多视图深度图的压缩和解码提供了一个新的解决方案,通过聚类和跨视点信息融合来改善压缩深度图的质量,从而提高虚拟视图的渲染效果。这种方法可能对3D视频、增强现实和虚拟现实等应用有显著影响。
Cluster-Based Cross-view Filtering for Compressed
Multi-view Depth Maps
Zhen Liu
#1
, Qiong Liu
>2
, You Yang
>2
, Yuchi Liu
∗3
, Gangyi Jiang
#1
, Mei Yu
#1
#1
Faculty of Information Science and Engineering,
Ningbo University, Ningbo, China
>2
School of Electronic Information and Communications,
Huazhong University of Science and Technology, Hubei, China
∗3
Early Warning Institute, Hubei, China
1
liuzhenuse@126.com
2
q.liu@hust.edu.cn
3
yangyou@hust.edu.cn
4
bill liew@163.com
5
jianggangyi@126.com
6
yumei2@126.com
Abstract—In the field of multi-view video coding, multi-view
plus depth video is an important data format, but it always
suffers from quantization errors, which result in obvious arti-
facts in consequent virtual view rendering. In this paper, we
propose a cluster-based cross-view filtering (CBF) scheme for
the enhancement of compressed depth maps. In this scheme,
reconstructed depth information are mapped from cross-view,
and this information is benefit to the proposed filter. Then in
filtering one viewpoint depth map with candidate information
that are selected from non-locally current and neighboring
viewpoints. Specifically, in our scheme, candidates are clustered
in 3D super-pixel wise rather than block wise due to cross-
relationship among pixels in depth maps. The experimental
results show that 2.0074 dB average gain can be obtained by
our scheme, which suggests that the scheme outperforms than
state-of-the-art and classical filters in filtering the reconstructed
depth maps.
Index Terms—depth image filter, depth map reconstructed,
multi-view video coding, cluster-based filter,coding distortion
I. I
Arbitrary virtual views synthesis is an amazing functionality
of free-view video (FVV) system [1]. In this case, multi-
view color videos and depth maps are both required, and then
becomes an important data format in multi-view video coding.
The 3D video extension of High Efficiency Video Coding
(HEVC) [2] enables the above representations and provides
a number of new coding tools for depth video. These tools
are benefit for high compression ratio, but coding distortions
is inevitable on the reconstructed depth maps [3]. Depth maps
are characterized by large homogeneous areas and sharp edges.
Actually, these features are sensitive to compression tools.
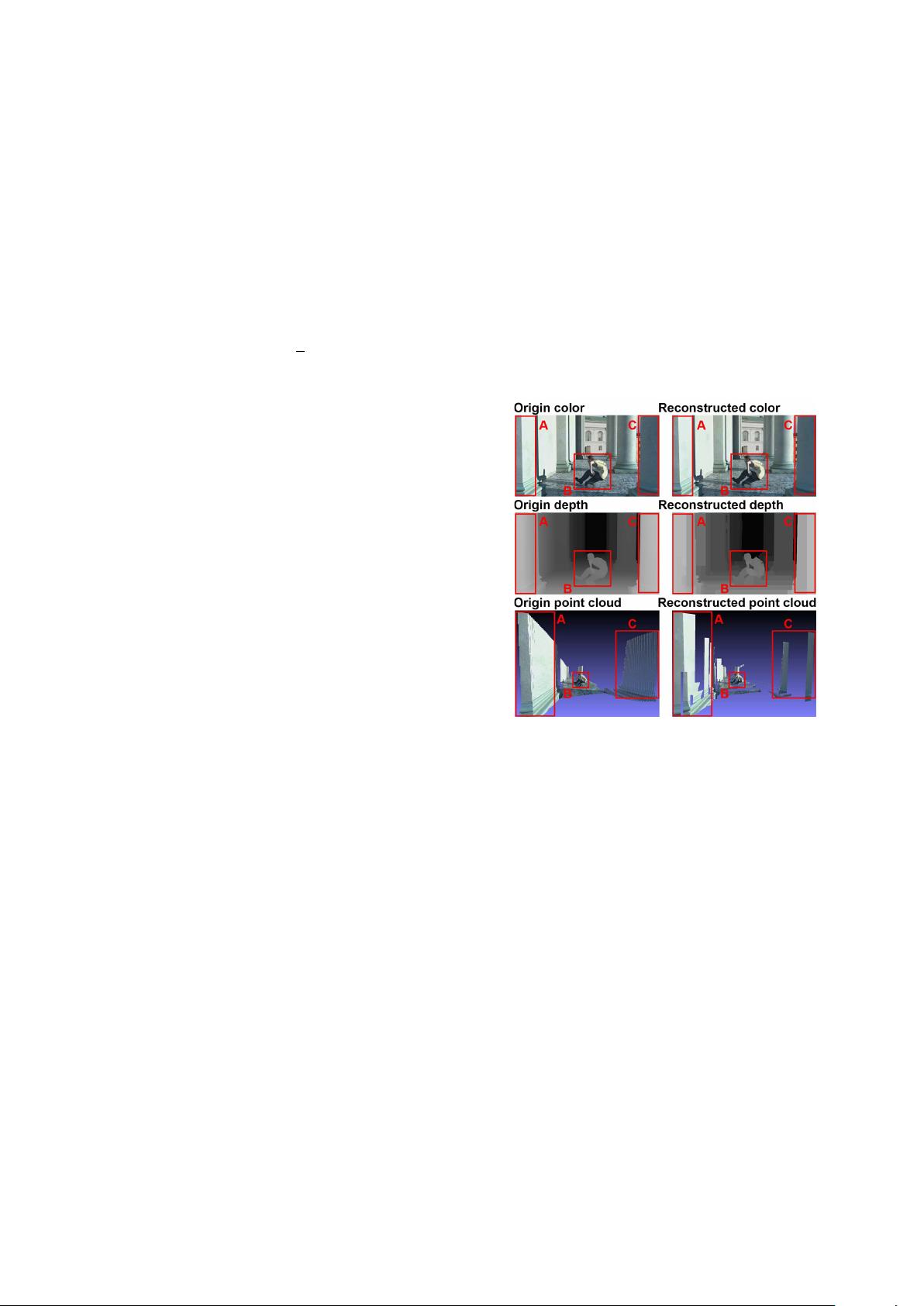
Fig. 1 shows an example of depth map in 2D gray format
impaired by compression distortion, and then be re-projected
in 3D point cloud format. In this example, structures in region
B is impaired, while discontinuity occurs in regions A and
C. The spread of FVV applications is limited if these kind of
distortions can not be healed properly.
In this literature, little work have been done on this special
distortion [3]–[5]. Some filters were proposed to address the
Fig. 1. The comparison of original and reconstructed depth map in 2D gray
format and 3D point cloud format
problem of depth map enhancement. For example, a joint
trilateral filter [6] and noise-aware depth filter [7] were respec-
tively proposed for in-loop filtering and suppress the texture-
copy defects. However, these methods are not specified for
depth maps with compression distortions [8]. Challenges arise
from two aspects. Actually, sharp edges and boundaries can
be hardly restored to their correction positions by conven-
tional non-joint filters, while compression distortion may be
propagated from color frames to depth maps if joint filters
are applied. In this paper, we propose a cluster-based cross-
view filter to address the problem of multi-view depth maps
impaired by compression distortions. We present our scheme
in details in Sec. II, and then the results and discussions in
Sec. III. Finally, we concluded our work in Sec. IV.
II. T P S
The proposed framework is illustrated in Fig. 2. In this
scheme, bilateral filter is modified and extended by cluster-
978-1-5090-5316-2/16/31.00
c
2016IEEE VCIP 2016, Nov. 27 – 30, 2016, Chengdu, China
下载后可阅读完整内容,剩余3页未读,立即下载
2019-12-27 上传
2012-05-05 上传
2021-04-17 上传
2023-03-25 上传
2023-06-02 上传
2023-06-09 上传
2023-03-29 上传
2023-08-02 上传
2024-01-24 上传

weixin_38745361
- 粉丝: 3
- 资源: 879
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
