光流法与视觉里程计:从Lucas-Kanade到金字塔光流
需积分: 44 153 浏览量
更新于2024-07-09
收藏 1.96MB PDF 举报
"这篇文档是关于视觉SLAM的教程,主要关注LK光流和直接法。文档中深入探讨了光流法的历史、分类以及在视觉SLAM中的应用。通过阅读文献,介绍了光流法的四种分类:FA(Forward Additional)、FC(Forward Composition)、IA(Inverse Additional)和IC(Inverse Compositional),并详细解释了组合算法中原始图像wrap的物理意义和前向与逆向光流法的区别。"
在视觉SLAM(Simultaneous Localization And Mapping,同时定位与建图)中,光流法是一种重要的技术,用于估计连续帧之间像素的运动。Lucas-Kanade光流法是一种经典的稀疏光流计算方法,它通过最小化像素灰度差来估计像素的运动。在本教程中,除了介绍Lucas-Kanade光流,还引导读者了解基于Gauss-Newton的金字塔光流法,这是一种优化光流估计的方法,通常能提供更准确的结果。
光流法的分类主要有两个标准:一是根据算法估计的是参数的叠加增量还是增量Warp,二是根据Warp更新规则是前向还是逆向。前向算法(FA和FC)直接在当前估计上叠加增量,而逆向算法(IA和IC)则通过组合当前估计和增量更新来得到新的估计,这种方式对warp集合有特定的要求,比如必须包含身份warp并且在组合运算中闭合,以满足半群约束。
在组合(compositional)算法中,wrap的概念很重要,它表示图像块在不同相机位置下的仿射变换。wrap的物理意义就是通过一个仿射变换矩阵A描述图像的位移,这个矩阵可以表示旋转、缩放和平移等几何变换。在SLAM中,利用这些变换可以更好地处理图像在不同视角下的变化,提高鲁棒性。
前向和逆向光流法的主要区别在于它们处理图像参数化的方式。前向方法直接对输入图像进行参数化,而逆向方法则是从目标图像反向推导出源图像的参数。在实际应用中,这两种方法各有优缺点,选择哪种取决于具体任务的需求和数据特性。
这篇教程深入浅出地讲解了视觉SLAM中的关键组成部分——光流法,对于理解SLAM系统的工作原理和优化技术有着重要的作用。通过学习,读者不仅可以掌握光流的基本概念,还能了解到更高级的光流估计技术和它们在SLAM中的应用。
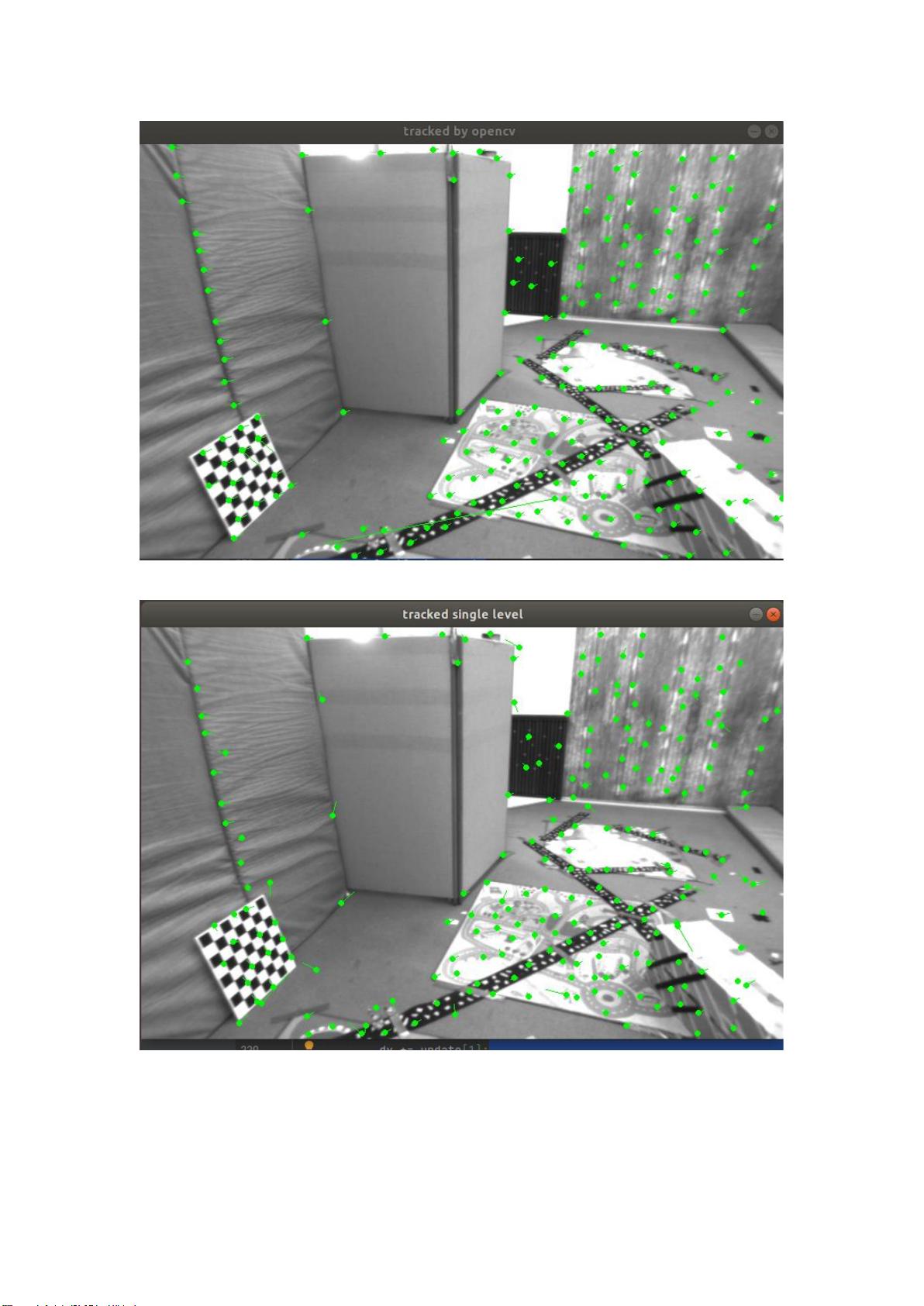
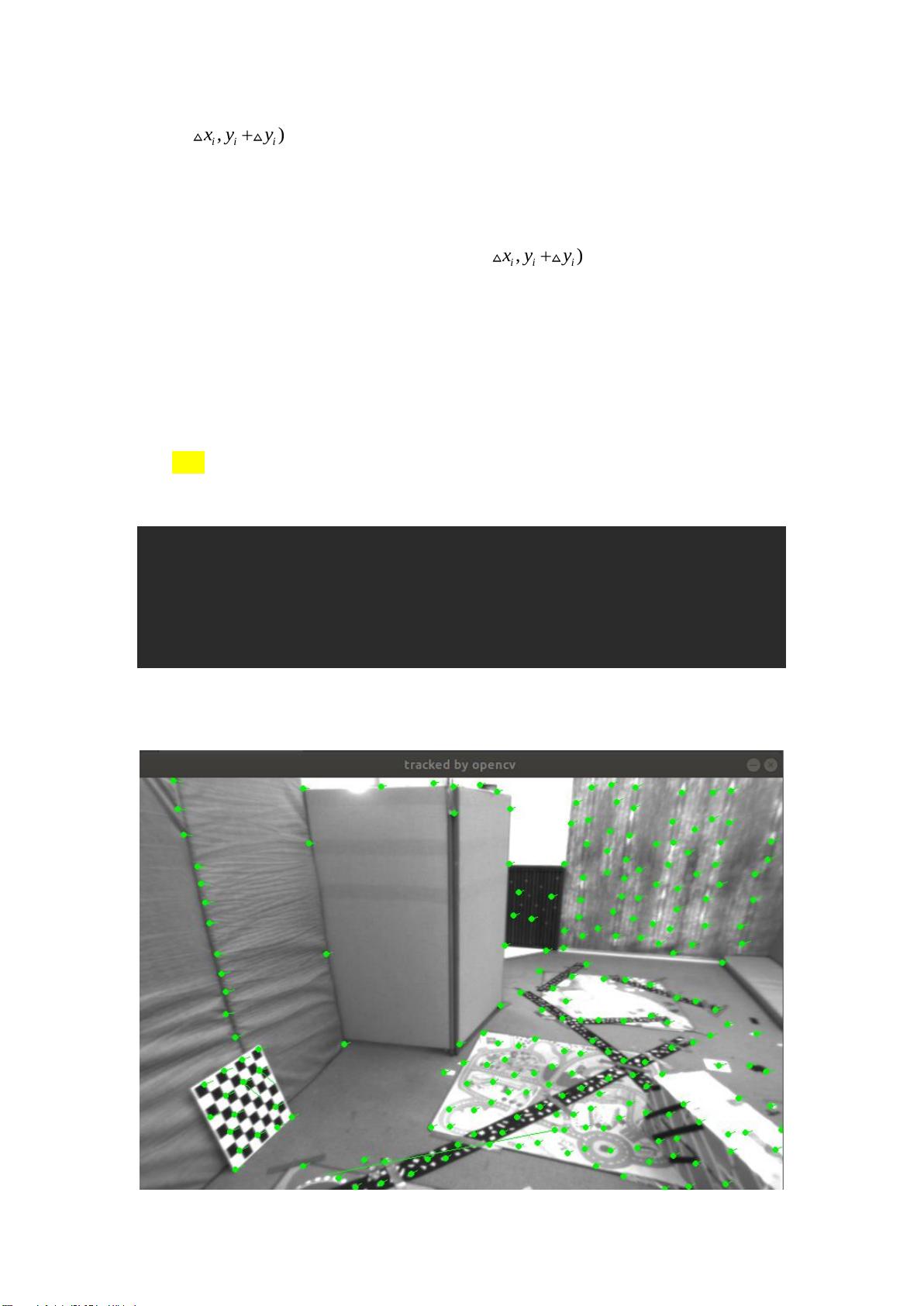
单层图像的 LK 光流:
2.3 反向法(1 分)
在你实现了上述算法之后,就会发现,在迭代开始时,Gauss-Newton 的计算依赖于
2
I
剩余30页未读,继续阅读
2022-08-03 上传
2022-08-04 上传
2021-09-01 上传
2021-10-18 上传
2021-08-12 上传
2021-08-14 上传
2021-06-06 上传
2020-08-25 上传

毅博明喆
- 粉丝: 99
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- windbg实验 1
- 网络认识实验 计算机网络
- 单片机C语言的使用技巧
- MATLAB 环境下的串行数据通信系统设计
- Visual C++开发工具与调试技巧整理
- 基于温度传感器的采样
- StrutsCatalogLazyList
- 卫星通信论文(数字电视系统信源信道编码技术)
- 高质量C++/C编程指南
- shell经典的面试题目
- Regsvr32命令修复系统故障实例
- The Direct3D® 10 System
- 网管常用的网络命令.doc
- 企业内部通信系统源码
- iphone application progamming guide
- 全国计算机水平与软件专业技术资格(水平)考试2008年下半年程序员下午试卷B
