固高工业6自由度机器人控制器规格与示教操作说明
需积分: 9 133 浏览量
更新于2024-07-15
收藏 845KB PDF 举报
“固高工业6自由度机器手说明.pdf”提供了关于固高科技(深圳)有限公司的一款开放式、可重组机器人控制器开发平台的详细规格说明。这款机器人适用于工业环境,其特点是具有高度的灵活性和可重构性,旨在为技术人员提供有价值的参考资料。
该产品主要包括三大部分:机器人电控柜、机器人手持示教操作盘以及机器人软件DEMO平台。以下是对这些部分的详细解析:
1. 机器人电控柜:
- 结构:电控柜设计紧凑,包含上通风口、风扇、急停、启动、停止按钮和指示灯,以及CPAC控制器、交流伺服驱动器、吊钩、断路器、开关电源、外部信号接口、HMI接口、接线端子、照明灯管和电源及信号电缆接口。
- 参数:电控柜型号为GRC1000,供电电压为AC220V,50Hz,电流25A。主控制器采用GOOGOLOtoBox运动控制器,伺服单元采用安川伺服驱动,HMI为GOOGOLHMI。它还配备有16入/16出通用数字量I/O和24个轴控专用I/O,以及多种总线接口如USB、RS232、Ethernet和GOOGOLLINK。操作系统是WinCE5.0,开发环境为GOOGOLOtoStudio。电控柜设计考虑了搬运方式、工作环境条件、冷却系统、接地要求以及IEC防护等级,确保在各种工况下稳定运行。
2. 机器人手持示教操作盘:
- 结构:手持操作盘设计方便操作,包括结构和功能布局,便于进行机器人编程和控制。
- 技术参数:详细列出了操作盘的技术特性,如尺寸、重量、输入输出等。
- 功能说明:提供了对操作盘各项功能的详细解释,如按键操作、显示信息、通信功能等,便于用户理解和使用。
3. 机器人软件DEMO平台:
- 软件分层结构:说明了软件的架构设计,可能包括驱动层、控制层、应用层等层次,便于软件开发和维护。
- 关键功能列表:列出了软件的主要功能,如运动控制、路径规划、故障诊断等,这些都是工业机器人操作的核心要素。
- 界面设计规格:描述了用户界面的设计原则和规范,确保操作直观易用。
- 功能设计规格:详细规定了每个功能的具体实现,以便于开发者按照需求进行定制和扩展。
这款固高科技的六自由度机器人控制器开发平台集成了先进的硬件和软件技术,提供了全面的控制和编程解决方案,适用于各种工业应用场景。通过其开放式结构和可重组特性,用户可以根据具体任务需求进行灵活配置,提高工作效率并降低开发成本。对于技术人员来说,这份说明文档无疑是一份宝贵的参考资料。
3
“开放式结构、可重组机器人控制器开发平台”产品规格说明书
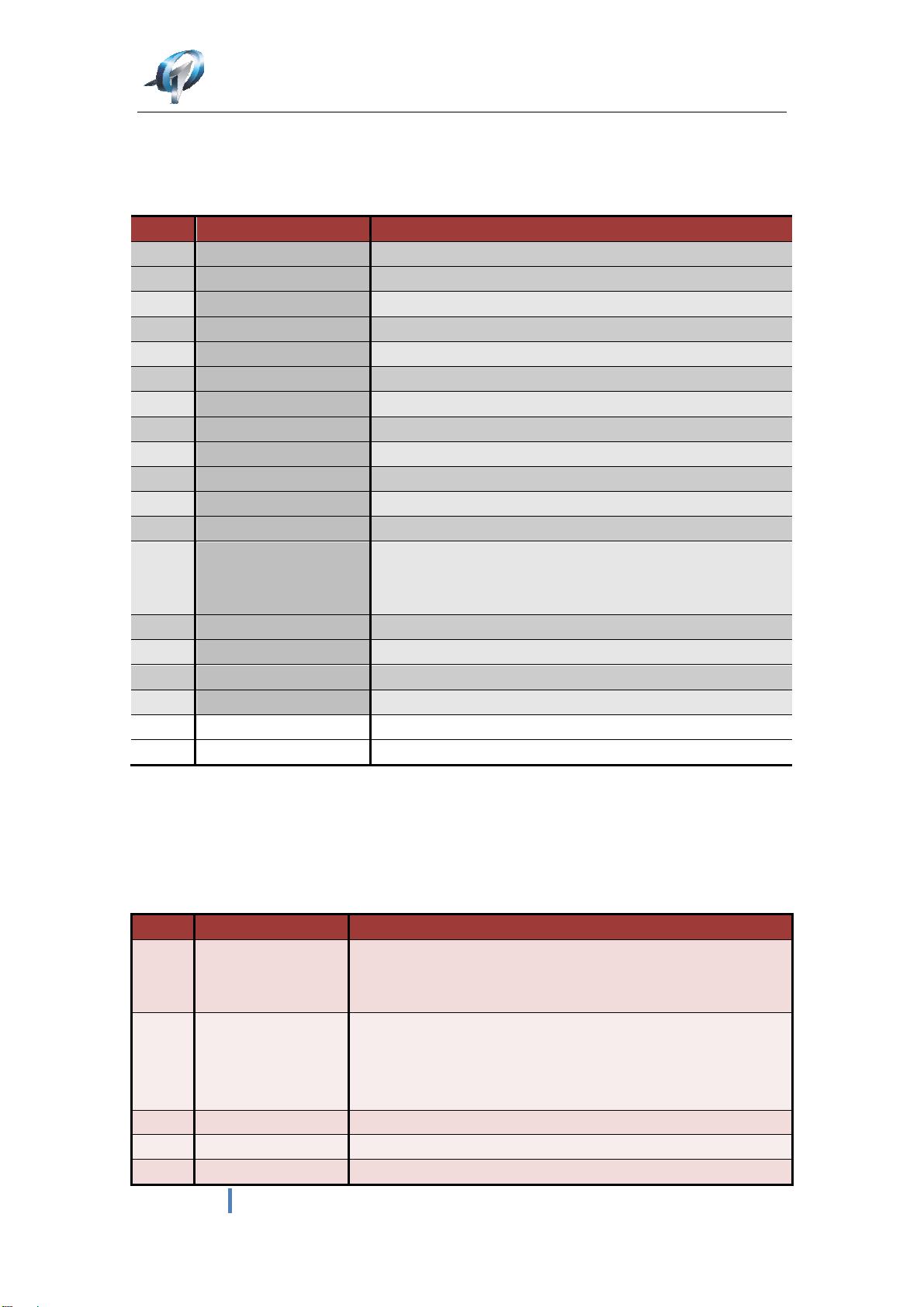
1.1.2 机器人电控柜参数
表格 1 机器人电控柜参数
序号 项目名称 项目参数
1
型 号
GRC1000
2
供电电压
AC220,50HZ
3
供电电流
25A
4
主控制器 GOOGOL OtoBox 运动控制器
5
伺服单元 安川伺服驱动
6
HMI
GOOGOL HMI
7
I/O 本地单元 16 入/16 出通用数字量 I/O、24 个轴控专用 I/O
8
I/O 远程单元 基于 GOOGOL Link I/O 模块
9
总线接口类型 2USB,RS232,Ethernet,GOOGOL LINK
10
操作系统
WinCE 5.0
11
开发环境
GOOGOL OtoStudio
12
搬运方式 吊装搬运或叉车搬运
13
工作环境 温度:0~45℃
湿度:20~80%RH(无结露)
避免接触易烯腐蚀性液体或气体,远离电气噪声源
14
冷却系统 循环风冷
15
接地 单独接地
16
IEC 防护等级
IP50
17
质量
18
外形尺寸
1200mm*500mm*1000mm
19
材料 金属钣金冷弯加工,配密封胶圈。
1.1.3 机器人电控柜功能列表
表格 2 机器人电控柜功能列表
序号 功能 说明
1
断路开关 机器人系统总断路开关:
ON:系统上电;(但机器人不上伺服)
OFF:系统断电;
2
急停 系统急停按钮,同手持操作盘上的急停按钮串联。
按下:机器人控制系统伺服断电;
旋起:允许机器人伺服系统使能,但使能操作需要示教盘操
作。
3
电源指示 系统上电指示,灯亮——系统上电状态。
4
维修照明 开门电柜内灯亮,便于内部接线需要。
5
通风冷却 根据电控柜电器件冷却要求,从电柜后边下部进风,从电控
剩余16页未读,继续阅读
2023-07-22 上传
2023-07-05 上传
2023-09-10 上传
2023-06-27 上传
2024-06-10 上传
2023-10-21 上传
2023-06-06 上传
2023-07-01 上传
2023-07-30 上传

dhuazhang
- 粉丝: 2
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
