伺服控制系统:原点回归与错误处理
需积分: 9 127 浏览量
更新于2024-07-22
收藏 411KB PDF 举报
本文档主要介绍了伺服控制的相关程序和指令,包括原点回归、JOG速度更改以及伺服ERROR的复位方法。
1. 原点回归程序:
原点回归是伺服控制系统中的关键操作,确保设备能够准确回到参考点。程序示例中,原点回归启动通常涉及一系列伺服参数和PLC信号的交互。例如,通过M1250启动按键,Y50作为定位启动信号,Y44作为轴停止信号,Y40表示PLC准备完成。电机手动状态由M1081控制,M6401启动原点回归条件。专用指令[T0H4K1500K9001K1]用于执行原点回归,其中T0指PLC到QD75的输出,H4、K1500、K9001和K1分别对应模块地址、定位指令、机械原点回归和设定值。Y50、X50和X4C等信号用于监控回归过程,而M6501和M1251则用于指示原点回归的完成状态。
2. 原点回归过程:
在原点回归过程中,Y50和X50信号指示动作进行中,X4C表示电机忙状态。当原点回归完成,M6501持续输出,直到出现如M6701的伺服错误或X48报警,此时需要通过[RSTY50]复位电机。M1251指示灯则在回归过程中闪烁,完成后常亮。
3. 全部原点回归程序:
全面的原点回归启动可能涉及M1290开关,需在手动模式下进行(M1001)。原点回归的输出由M100处理,并在完成时通过M101输出。复位按键(M1012)和紧急停止(M105)也可中断回归过程。原点回归完成后,所有电机的原点完成输出状态会被指示出来。
4. JOG速度更改:
JOG速度的选择可通过M1055、M1053和M1051等按键开关进行,速度值可随时调整。D120用于存储速度值,通过DMOV和DTOH4K1518D120K1指令将数据写入伺服系统,实现JOG速度的设置。
5. SERVOERROR的复位:
当发生伺服ERROR时,可使用K1502、K1602、K1702、K1802等专用代码分别对不同轴进行错误复位。这些指令用于清除轴一、轴二等的错误状态,恢复伺服系统的正常运行。
总结:伺服控制涉及到精确的原点回归、动态的JOG速度调整以及及时的错误复位。理解并掌握这些指令和程序对于有效操作和维护伺服电机系统至关重要。在实际应用中,应根据具体设备的参数和配置来编写和执行相应的控制程序。
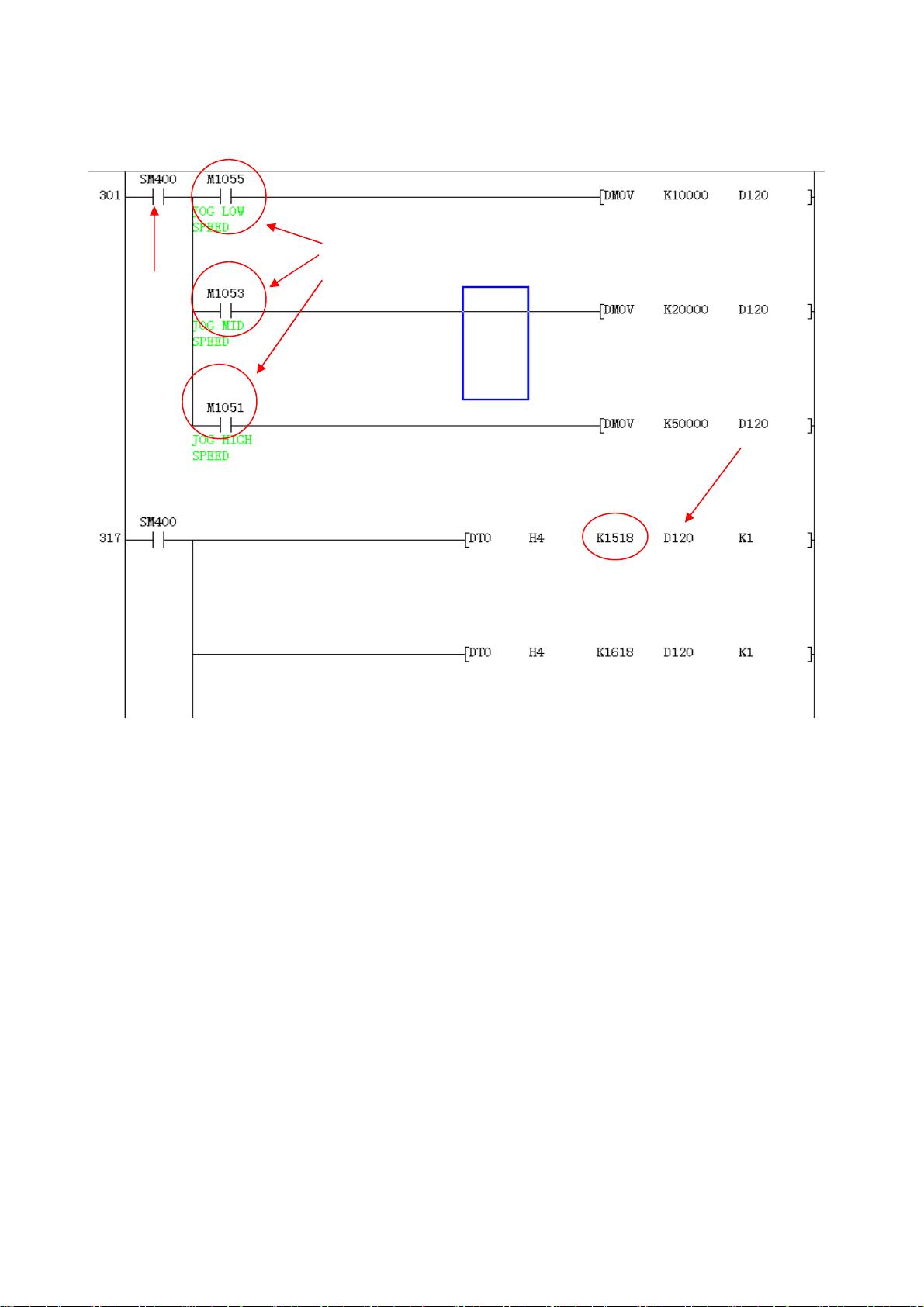
4.JOG SPEED的更改和专用指令写法:
高速,中速,低速
的选择按键
伺服JOG速度写入
专用参数代码
随时可以
改变
M1055 M1053 M1051 是速度选择的几个按键开关,可以通过TOUCH直接进
行设定选择
SM400一直处于接通状态,表示JOG的速度选择可以通过开关的任意时间进
行设定写入从而改变。
D120 是速度值存储的字地址
DMOV 传送指令,D 32数据传送指令 (速度的值是任意设定的)
[ DTO H4 K1518 D120 K1 ] JOG速度专用指令写入方法
剩余15页未读,继续阅读
2018-08-17 上传
327 浏览量
2018-08-26 上传
2022-06-16 上传
2022-09-23 上传
2022-07-15 上传

gongfushan521314
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 达梦数据库DM8手册大全:安装、管理与优化指南
- Python Matplotlib库文件发布:适用于macOS的最新版本
- QPixmap小demo教程:图片处理功能实现
- YOLOv8与深度学习在玉米叶病识别中的应用笔记
- 扫码购物商城小程序源码设计与应用
- 划词小窗搜索插件:个性化搜索引擎与快速启动
- C#语言结合OpenVINO实现YOLO模型部署及同步推理
- AutoTorch最新包文件下载指南
- 小程序源码‘有调’功能实现与设计课程作品解析
- Redis 7.2.3离线安装包快速指南
- AutoTorch-0.0.2b版本安装教程与文件概述
- 蚁群算法在MATLAB上的实现与应用
- Quicker Connector: 浏览器自动化插件升级指南
- 京东白条小程序源码解析与实践
- JAVA公交搜索系统:前端到后端的完整解决方案
- C语言实现50行代码爱心电子相册教程
