合肥工大球杆系统实验:非线性数学模型与数字P控制器设计
需积分: 50 128 浏览量
更新于2024-07-17
2
收藏 1.37MB PDF 举报
本实验书主要关注的是球杆系统GBB1004的实验研究,该系统在合肥工业大学电气与自动化工程学院的专业中心实验室进行。球杆系统作为一项重要的非线性系统研究对象,其特点是理论上的非线性特性,这使得它在控制系统设计和分析中具有显著挑战性。
首先,实验指导书的第1部分是系统简述,它会介绍球杆系统的整体概念,包括其基本结构和工作原理。这部分可能会探讨球杆系统如何通过机械连接、电子控制元件等构成,以及其在实际应用中的作用,如工业自动化、机器人技术或高尔夫球杆等领域的运动控制。
在电气部分,读者可以了解到球杆系统的硬件组件和连接方式,如电机、传感器、电源、以及各种接口电路的设计。这里可能涉及电压、电流控制策略,以及信号处理和转换的过程,这些都是非线性系统中必须考虑的关键因素。
软件实现章节将着重介绍如何对球杆系统进行建模和控制算法设计。实验一中,传递函数和状态空间方程的讨论是核心内容,传递函数用于描述系统动态响应与输入之间的关系,而状态空间方法则提供了系统的数学抽象,这对于理解非线性系统的动态行为至关重要。通过这些模型,可以预测系统在不同输入下的行为,并设计适应的控制策略。
实验一的目标明确,旨在通过数学模型的建立和分析,帮助学生深入理解球杆系统的动态特性,以及如何将其转化为可操作的控制系统。实验内容可能包括测量和处理实验数据,验证模型的准确性,以及通过调整控制器参数来优化系统性能。
实验二则聚焦于球杆系统的数字P控制器设计,这是一种常见的控制策略,用于改善系统的动态响应和稳定性。在这个环节,学生将学习如何运用控制理论,如比例(P)控制原理,结合非线性系统的特性,设计出有效的控制器以实现对球杆运动的精确控制。
总结来说,这本实验指导书提供了一个实践平台,让学生在非线性球杆系统的研究和控制上得到训练,既提升了理论知识的理解,也锻炼了实验技能,对于理解和应对实际工业中的复杂控制系统有着重要意义。
6
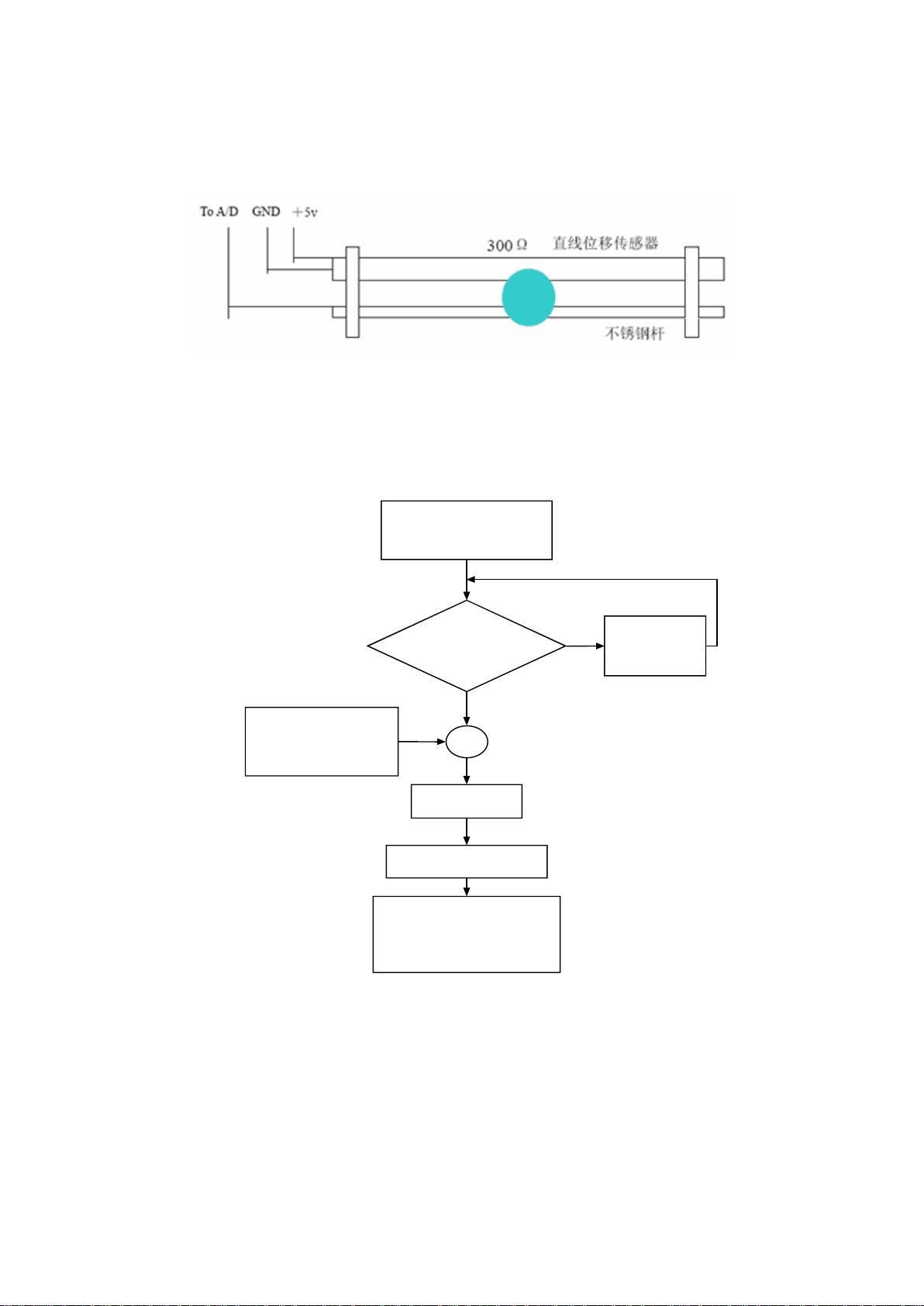
图5 小球位置测量示意图
b)伺服输出角度的测量:采用IPM100 控制器,电机驱动齿轮转动时通过电机实际位
置转换得到角度θ。
3 软件实现
控制程序流程图:
从 键 盘 或 鼠 标
键 入 小 球 位 置
d
x
是 否 在 轨 道
范 围
重 新 键 入
新 的 数 据
读 出 运 动 控 制 卡
检 测 到 的 小 球 的
当 前 位 置
x
控 制 器
反 馈 回 运 动 控 制
驱 动 控 制 杆
, 带 动 横 梁
转 动 一 个 角 度
, 以 使 球
稳 定 在 所 要 控 制 的 位 置
a
是
否
+
-
xx
d
-
图6 程序流程图
剩余29页未读,继续阅读
251 浏览量
452 浏览量
159 浏览量
2021-11-10 上传
251 浏览量
点击了解资源详情

qq_44855357
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- JAD工具:Java反编译神器的实用教程
- Delphi多线程控件BmdThread_1.9的安装与测试指南
- Flash猜拳游戏源码分享 - 剪刀石头布
- Java编程课程中辐射监测任务1解析
- 深入探究ASP.NET同学录系统设计与实践
- Windows Server 2003双机热备技术实施教程
- 掌握kindeditor使用技巧,实例操作解析
- mimos:打造hapi生态系统的Mime数据库界面
- JqGrid在VS2010和MVC下的应用示例
- C#实现USB HID设备通信的方法及实例
- YangDiDi-bilibili.github.io网站CSS技术解析
- Eclipse贪吃蛇游戏插件简易安装指南
- MATLAB实现:非线性方程组的无导数解算器开发
- 揭秘:超级玛丽游戏源码的神秘面纱
- Scribd文档去划线解决方案及开发指南
- 单片机红外线控制数码管显示与蜂鸣器
