51单片机实现的超声波避障测速小车设计
"这篇文档是关于基于51单片机的超声波避障测速小车的设计,旨在实现自动避障和显示行驶距离。实验由大学信息科学与工程学院的学生完成,采用模块化设计,包括微控制器、避障、驱动、显示、测速、电源和小车模块。设计中,单片机STC89C52RC为核心,通过超声波模块检测障碍物并控制电机动作,TCRT5000光电对管用于测速,显示模块使用LCD1206显示行驶距离。"
本文档详细介绍了基于51单片机的超声波避障小车的构建和工作原理。首先,设计要求明确,小车需要具备避开障碍物以及实时显示行驶距离的功能。系统采用模块化设计,包括以下几个关键部分:
1. 微控制器:STC89C52RC单片机作为核心处理器,处理传感器信息并控制电机动作。
2. 避障模块:利用现成的超声波发射接收模块,检测小车前方的障碍物,反馈距离信息给单片机。
3. 驱动模块:根据单片机的指令,控制小车转向以避开障碍物。
4. 显示模块:使用LCD1206显示屏,显示障碍物距离和行驶路程。
5. 测速模块:采用TCRT5000光电对管测量小车速度,从而计算行驶距离。
6. 电源模块:提供+12V和+5V电源,其中+12V主要供给电机,+5V供单片机和其他模块使用。
7. 小车模块:集成所有组件,形成完整的小车结构。
在硬件选择上,STC89C52RC单片机因其内含8K ROM、512 RAM、32个GPIO引脚以及四个中断源,足以满足设计需求。此外,它还支持ISP在线编程,方便调试和更新程序。
在实际操作中,当超声波传感器检测到前方有障碍物时,会向单片机发送信号,单片机处理后控制驱动模块使小车转向避开。同时,通过测速模块计算行驶速度,累加得到行驶距离,这些信息会在LCD1206屏幕上实时更新显示。
这个设计不仅考虑了功能实现,还注重成本控制和实用性,使用的元件大多是在先前学习或实训中使用过的,确保了设计的可行性。这款基于51单片机的超声波避障测速小车是信息科学与工程领域一个典型的嵌入式系统项目,对于理解和实践单片机控制、传感器应用、模块化设计等方面具有重要价值。
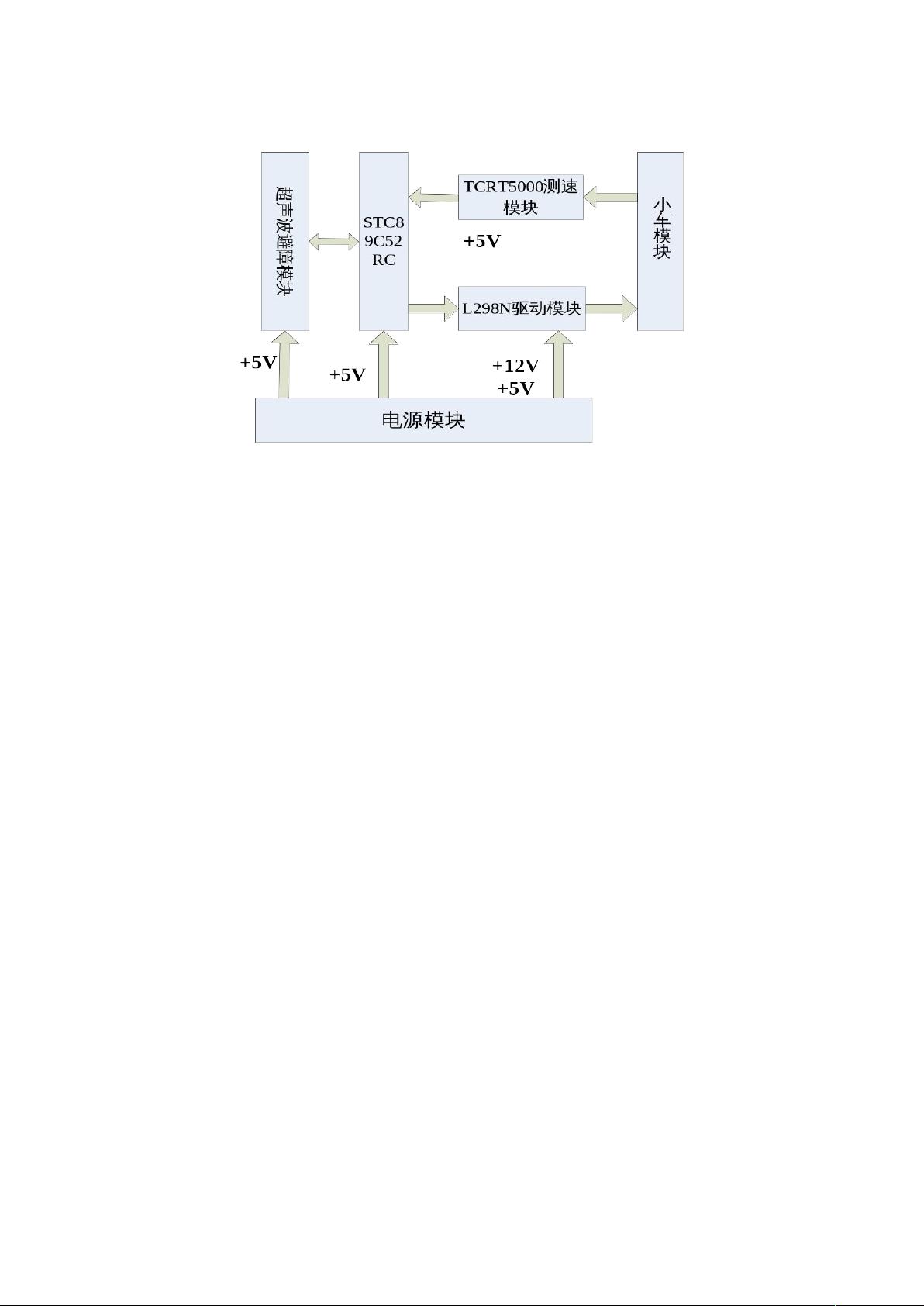
图 1.2
整体
设计框图
§1.4 功能说明
本设计主控芯片采用 51 芯片,负责传感器的状态,并向电机驱动模块发出
动作指令。复位采用手动复位。电源模块有市电转出 +12V,再将+12V 转换成
+5V 提供给单片机及其他模块,+12V 主要为驱动电机提供电源。避障模块采用
购买的成品,该模块在单片机的控制下对小车前方的路况进行检查,并将检测
信息反馈给单片机,单片机经过处理反馈回来的信息,发出相应的指令控制驱
动模块,从而控制小车做出相应的动作,达到避障的目的。为了显示走过的路
程,本设计采用 TCRT5000 光电对管设计的测速的模块,对小车的速度进行检
测,进而求出路程。
第二章 硬件的选择与组成
§2.1 单片机的选择
采 用 单 片 机 STC89C52RC 为 核 心 , 8K 的 内 部 程 序 存 储 器
(ROM),512 个内部数据存储器(RAM),4 个寄存器区,32 个通用 I/O
端口,2 个 16 位的定时、计数器,有 ISP 功能,能用于下载线进行的在线编
程,设有 4 个中断源,能够完成设计要求,且该芯片价格便宜,采用该芯片能
够达到设计要求,且平时实训中一直采用该芯片,对其比较熟悉,控制起来相
对简单。
故该设计选用 STC89C52 作为主控芯片。该芯片存储容量大,体积小。单
片机最小系统:电源部分、晶振部分、复位电路和 31 号脚接高电平。单片机
包含中央处理器、程序存储器(ROM)、数据存储器(RAM)、定时/计数
剩余14页未读,继续阅读
相关推荐







fly60000
- 粉丝: 8
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- ASP_NET的十大技巧
- Gimp中文经典入门实用教程
- DOS批处理高级教程精选合编
- 鸟哥的linux详细教程
- Java 极限编程PDF
- HPUX系统优化简述-公众第一版
- Symbian C++入门
- PXI Express技术一本通
- 单片机学习-编程基础
- LCD1602的驱动
- IBM Redbook - 商务智能认证指导 (Business Intelligence Certification Guide)
- Minimum[1].unix.commands.for.DBAs.pdf
- aaaaaaaaaaaaaaaaaaaaaa
- Fusioncharts报表工具帮助
- 基于C_的高校图书资料管理系统的设计
- python核心编程
