




智能轮型机器人四轮驱动伺服系统设计
版权申诉
59 浏览量
更新于2024-06-22
收藏 1.39MB DOC 举报
"智能轮型机器人机构及伺服系统设计"
本文主要探讨了智能轮型机器人的机构设计和伺服系统构建,特别是在国内机器人技术发展的背景下。首先,作者介绍了当前我国机器人技术的发展现状,阐述了设计目标,并对机器人的整体设计方案进行了详细分析。设计方案包括考虑机器人的几何尺寸、选择合适的驱动芯片以及编写程序。
在机器人机构设计方面,作者从性能需求出发,对比了多种运动方式、模型结构和车体成型方法。最终,选择了非完整约束轮驱四轮式移动结构,即后轮同轴驱动、前轮转向的布局。这种设计能够提供良好的机动性和稳定性。
接着,文章深入讨论了机器人的硬件结构设计。这包括驱动轮电机和转向轮电机的选择与驱动电路设计,齿轮的设计计算与校核,以及前后减震系统和转向机构的详细设计。此外,车体的机械结构设计也是关键部分,确保机器人在各种环境下的耐用性和安全性。
伺服系统模块是本设计的一大亮点。文中提到,采用增量式光电编码器来监测后轮的实时转速,通过特定算法生成PWM(脉宽调制)信号,从而实现对电机驱动模块的闭环控制,提高了机器人的运动精度和稳定性。
论文最后总结了研究的主要工作,并对设计的轮型机器人进行了联合调试。实验结果显示,该系统表现出了良好的稳定性、可靠性,具有高可控性和安全性,满足了预设的设计要求。
关键词涉及:轮式移动机器人(WMR)、硬件设计、非完整约束条件、伺服系统模块。本文提供了一种智能轮型机器人的全面设计方法,包括机械结构、伺服控制系统和实际应用验证,为同类机器人的研发提供了有价值的参考。
同步控制两轮转向,使机器人按照要求的方向移动。
轮式移动机构又主要分三个轮、四个轮,三轮支撑理论上是稳定的然而,这种装置
很容易在施加到单独轮的左右两侧力 F 作用下翻倒,因此对负载有一定限制。我们为提
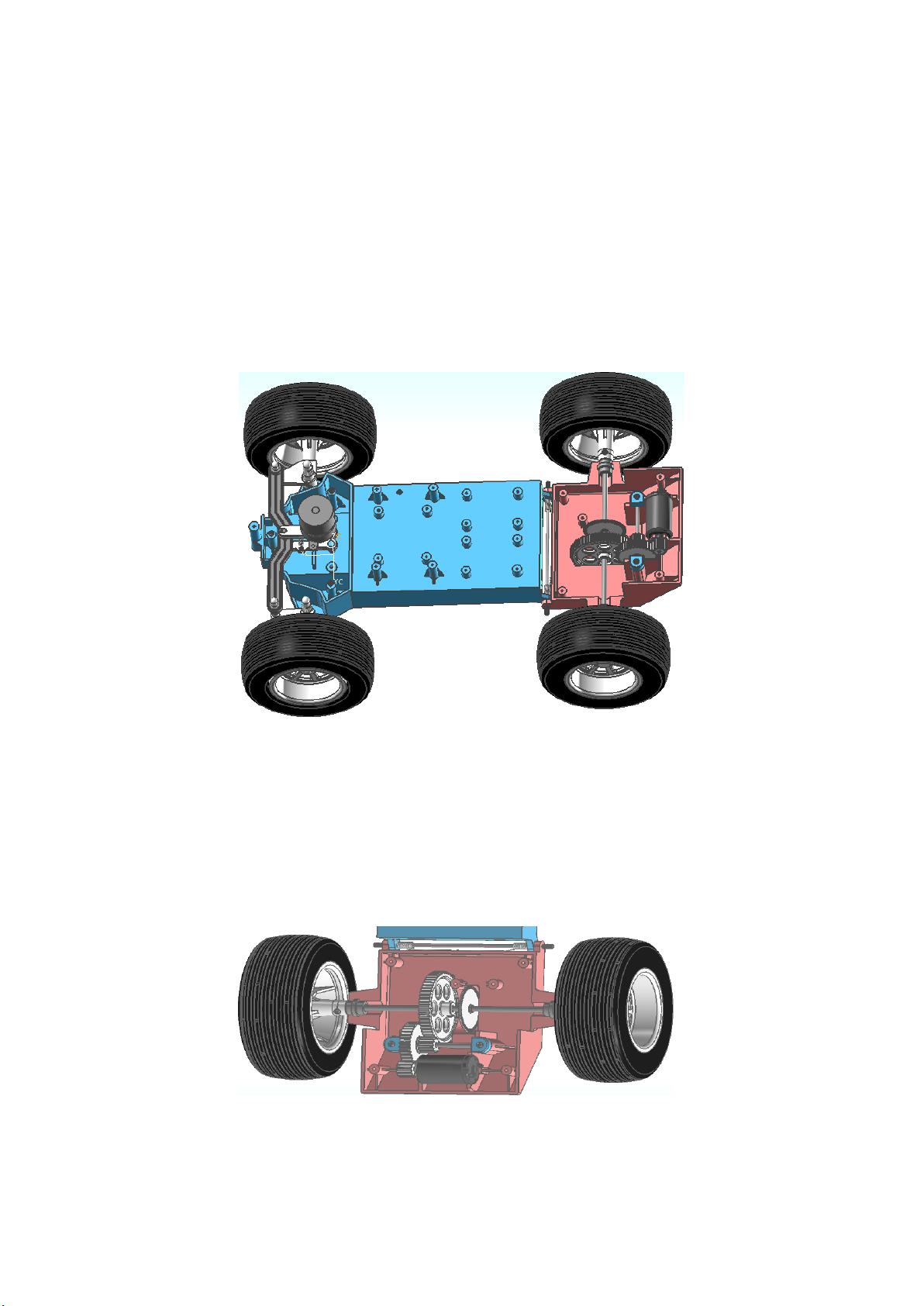
高稳定性和承载能力,决定选用四轮机构,后轮为两驱动轮,两个转向轮为前轮,具体
结构模型见 UG 图 2-4。这种结构能实现运动规划、稳定以及跟踪等控制任务,可适应复
杂的地形,承载能力强,但是轨迹规划及控制相对复杂。
图 2-4 小车整体结构 UG 模型图
2.3 轮型机器人驱动轮组成
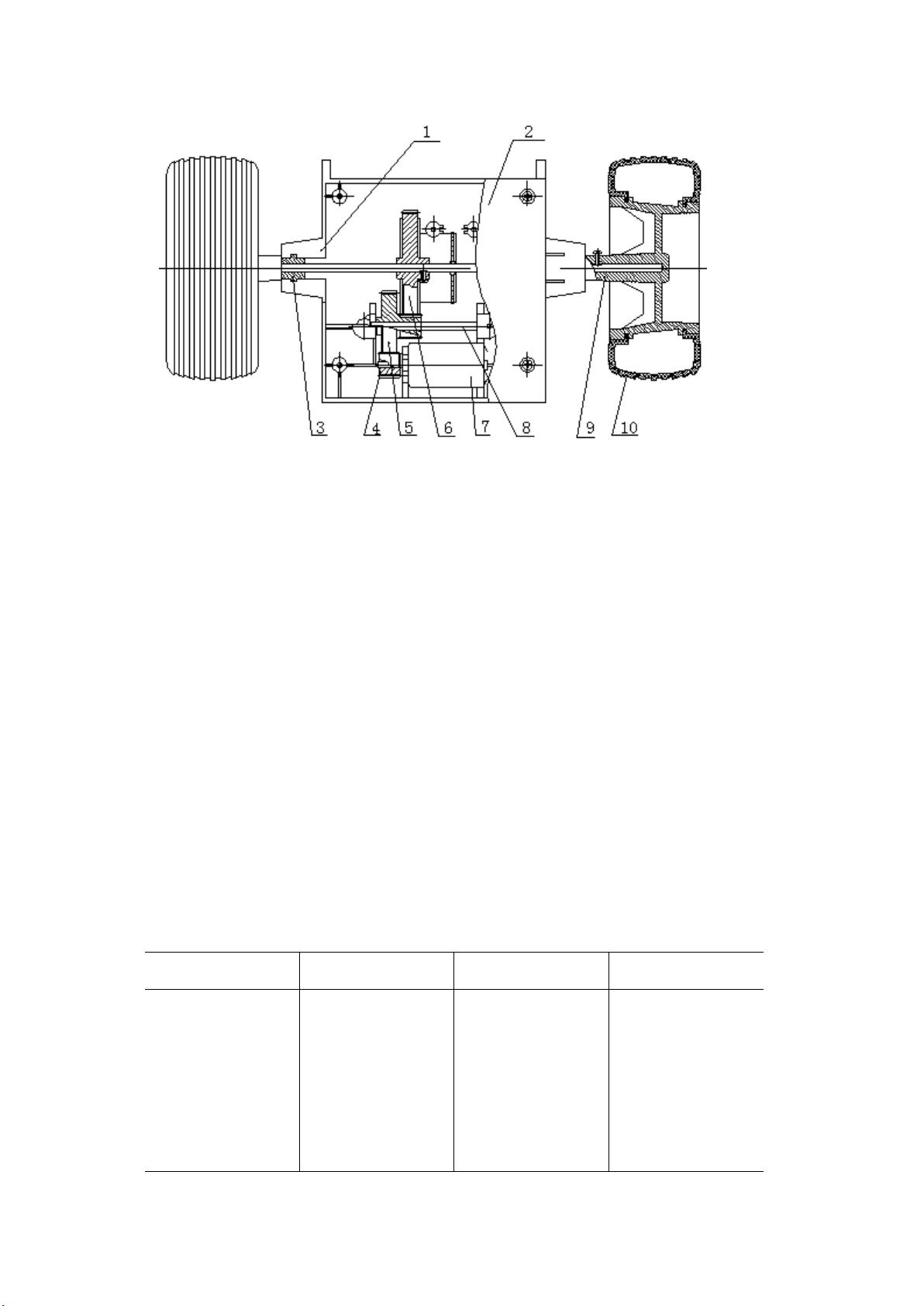
后轮驱动装置机械结构模型图如图 2-5:
图 2-5 后轮驱动装置机械结构模型
后轮驱动装置机械传动结构如图 2-6 所示:

剩余63页未读,继续阅读
2023-07-15 上传
2023-07-11 上传
2024-04-19 上传
149 浏览量
296 浏览量
2023-07-11 上传

老帽爬新坡
- 粉丝: 102
 我的内容管理
展开
我的内容管理
展开








最新资源
- 计算机体系结构课件与配套习题(PDF)
- Delphi Sqlserver数据库连接组件SDAC4.3:高效便捷
- ASP登录与注册系统源码分析与实践
- 定时关机软件免费版:自动关机2010功能详解
- 精选TeX条目库:维护与编辑指南
- 可弯曲柔性电池制备技术深入解析
- VC技术打造仿QQ联众游戏大厅界面教程
- 模拟电子技术PPT学习资料汇总
- Unicode格式化工具 - 助力brew汉字显示
- 安卓多线程下载文件实例教程
- 电子商务系统Java开发实战:JSP与Struts应用
- node-opcua.github.io平台的HTML技术解析
- 探索m序列发生软件及其生成原理
- 初学者机器学习入门数据集:一维线性回归
- C语言程序设计教程课后答案第二版解析
- jQuery实现中文自动完成功能,完美兼容主流浏览器






















