TLD算法详解:跟踪-学习-检测
需积分: 0 47 浏览量
更新于2024-06-30
收藏 644KB DOCX 举报
"Tracking-Learning-Detection(TLD)算法是一种针对视频中单个物体长期跟踪的算法,由Zdenek Kalal提出。该算法结合了追踪器、检测器和机器学习三个模块,以应对视频中的未知物体长时间跟踪挑战。"
Tracking-Learning-Detection(TLD)算法的原理深度解析:
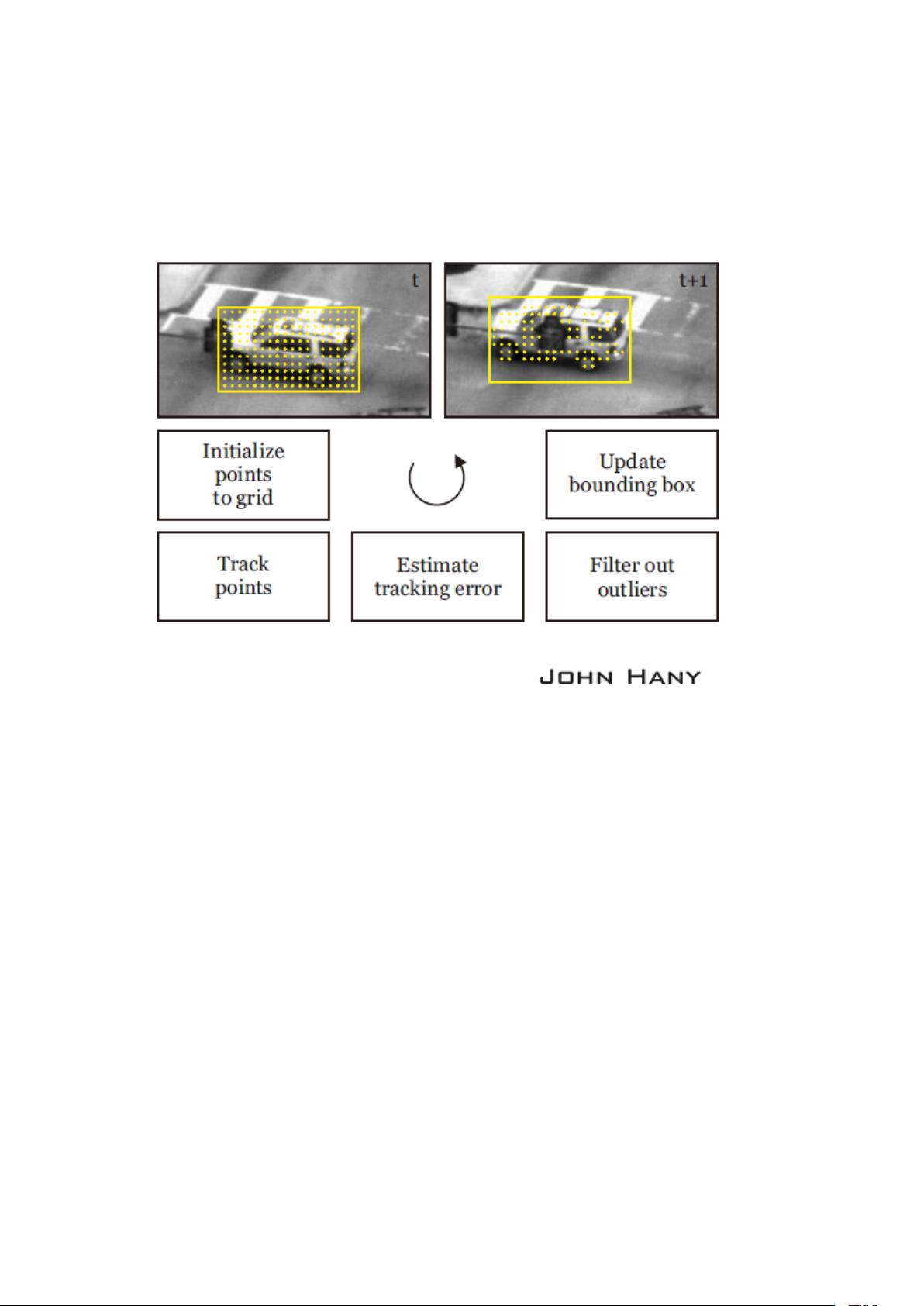
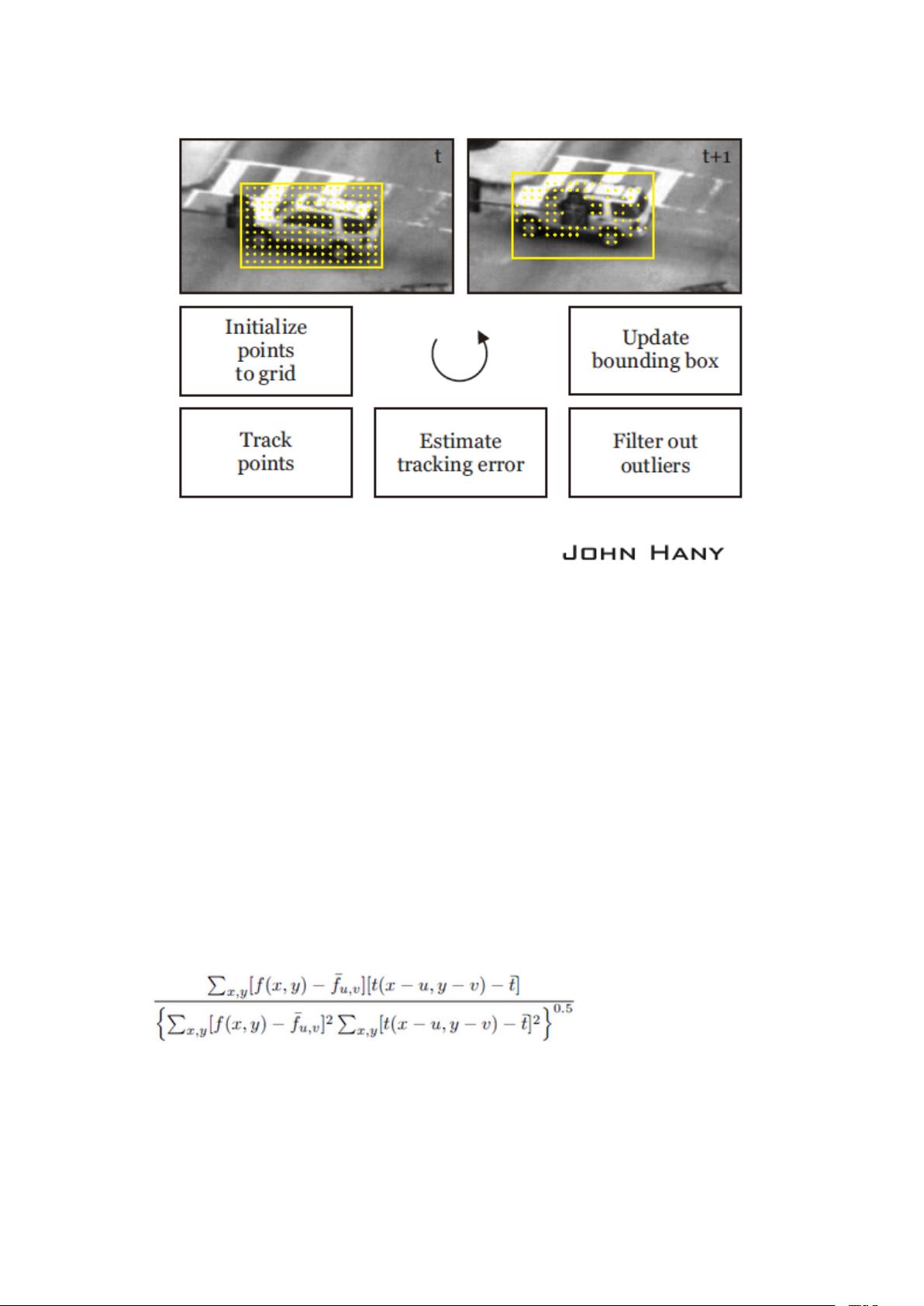
1. **追踪器(Tracker)**:追踪器是TLD算法的基础部分,负责在连续帧之间估计物体的运动轨迹。当物体在图像中持续可见时,追踪器根据物体在前一帧的位置来预测其在当前帧的位置。这种预测方法虽然容易受到累积误差的影响,但在物体未被遮挡时能提供稳定跟踪。通过追踪器的输出,可以为机器学习模块提供正样本,即Tracking->Learning过程。
2. **检测器(Detector)**:检测器的设计目的是校正追踪器可能出现的误差。它对每一帧图像进行全面扫描,寻找与目标物体外观相似的所有区域。这样,检测器不仅能在追踪器出错时提供纠正,还能生成正样本(物体出现的实例)和负样本(非物体区域),用于后续的学习过程。
3. **机器学习(Learning)**:机器学习是TLD算法的关键创新点,它利用追踪器和检测器提供的样本进行在线学习。正样本反映了物体的真实位置,而负样本则帮助算法识别非目标区域,从而避免误判。通过不断学习和更新,算法能适应光照、背景变化以及部分遮挡引起的物体外观变化,提高跟踪的准确性和鲁棒性。
4. **应用场景与挑战**:TLD算法适用于视频监控、自动驾驶、体育赛事分析等需要长时间跟踪未知物体的场景。然而,它也面临一些挑战,如物体消失再出现时的重识别、快速运动物体的跟踪以及复杂环境下的准确性问题。
5. **实现与优化**:原始的TLD算法源码基于Matlab和Visual Studio,可能需要特定环境才能运行。尽管存在一些C++版本的实现,如arthurv,但它们可能在速度上不尽人意。为了提高效率和适应性,研究人员和开发者通常会对算法进行优化,例如采用更快的检测器如HOG或者YOLO,以及更高效的机器学习模型。
TLD算法通过整合追踪、检测和学习,实现了对视频中未知物体的长时间跟踪,克服了单一追踪器或检测器的局限性。尽管存在挑战,但其核心思想和方法在现代视觉跟踪领域依然具有重要价值,并启发了许多后续的跟踪算法设计。
剩余32页未读,继续阅读
206 浏览量
143 浏览量
136 浏览量
306 浏览量
170 浏览量
144 浏览量
252 浏览量
302 浏览量
578 浏览量

张盛锋
- 粉丝: 31
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
