SLAM技术用于非合作目标位姿测量的研究
需积分: 0 12 浏览量
更新于2024-02-01
收藏 12.4MB PDF 举报
该硕士学位论文讨论了基于SLAM的非合作目标相对位姿测量的研究。随着人类空间活动的增加,轨道上的航天器数量不断增加,同时空间失效航天器和空间碎片的出现引起了各国的广泛关注。这些问题不仅占用了许多空间资源,而且还对其他航天器构成了威胁。朱晏辰在他的硕士学位论文中研究了这些非合作目标的相对位姿测量方法。
这篇论文的主要内容包括:基于SLAM的非合作目标相对位姿测量原理的研究、基于相机和激光雷达的非合作目标相对位姿测量系统的设计与实现、非合作目标相对位姿测量的仿真与实验验证等方面。作者首先对SLAM技术进行了介绍,并详细讨论了SLAM在非合作目标相对位姿测量中的应用。随后,作者设计了基于相机和激光雷达的非合作目标相对位姿测量系统,并进行了系统实现。最后,作者对所设计的系统进行了仿真和实验验证,结果表明该系统能够有效测量非合作目标的相对位姿。
本论文的研究成果对于解决空间中非合作目标的相对位姿测量问题具有一定的理论和应用价值。同时,该研究也为人类在空间活动中提供了一种新的技术手段,有助于提高空间活动的安全性和效率。同时,这项研究也为未来空间技术的发展提供了新的思路和方法。
通过该论文的研究,我们可以更好地了解基于SLAM的非合作目标相对位姿测量的原理和方法,为相关领域的研究提供了重要的理论基础。同时,论文中所设计的相对位姿测量系统也为未来的实际应用提供了参考和借鉴。朱晏辰的这项研究工作不仅在技术上具有一定的创新性,而且在解决实际问题中具有一定的应用前景。
总的来说,朱晏辰的这篇硕士学位论文对于基于SLAM的非合作目标相对位姿测量的研究具有一定的理论和实际意义。通过该论文的研究,我们可以更好地认识和理解这一问题,并为相关领域的研究和实际应用提供重要的参考和借鉴。同时,这项研究也为未来相关领域的发展提供了新的思路和方法。希望在未来的研究工作中能够进一步深化和拓展该课题,为人类空间活动的发展做出更大的贡献。

哈尔滨工业大学工程硕士学位论文
- 5 -
于关键帧
[41-43]
的视觉 SLAM 逐渐发展起来,其中最具有代表性的是 Parallel
Tracking and Mapping(PTAM)
[42]
,该论文提出一个简单有效的提取关键帧的方法,
并且将定位与创建地图分为两个独立的任务,在两个线程上进行。后来的许多
SLAM 方法均采取这种前后端的框架,原因在于前端需要实时响应图像数据而后
端建图则没有必要如此,只需在某些时刻与前端同步即可,这样做大大降低了算法
计算量。
图 1-3 PTAM 运行截图
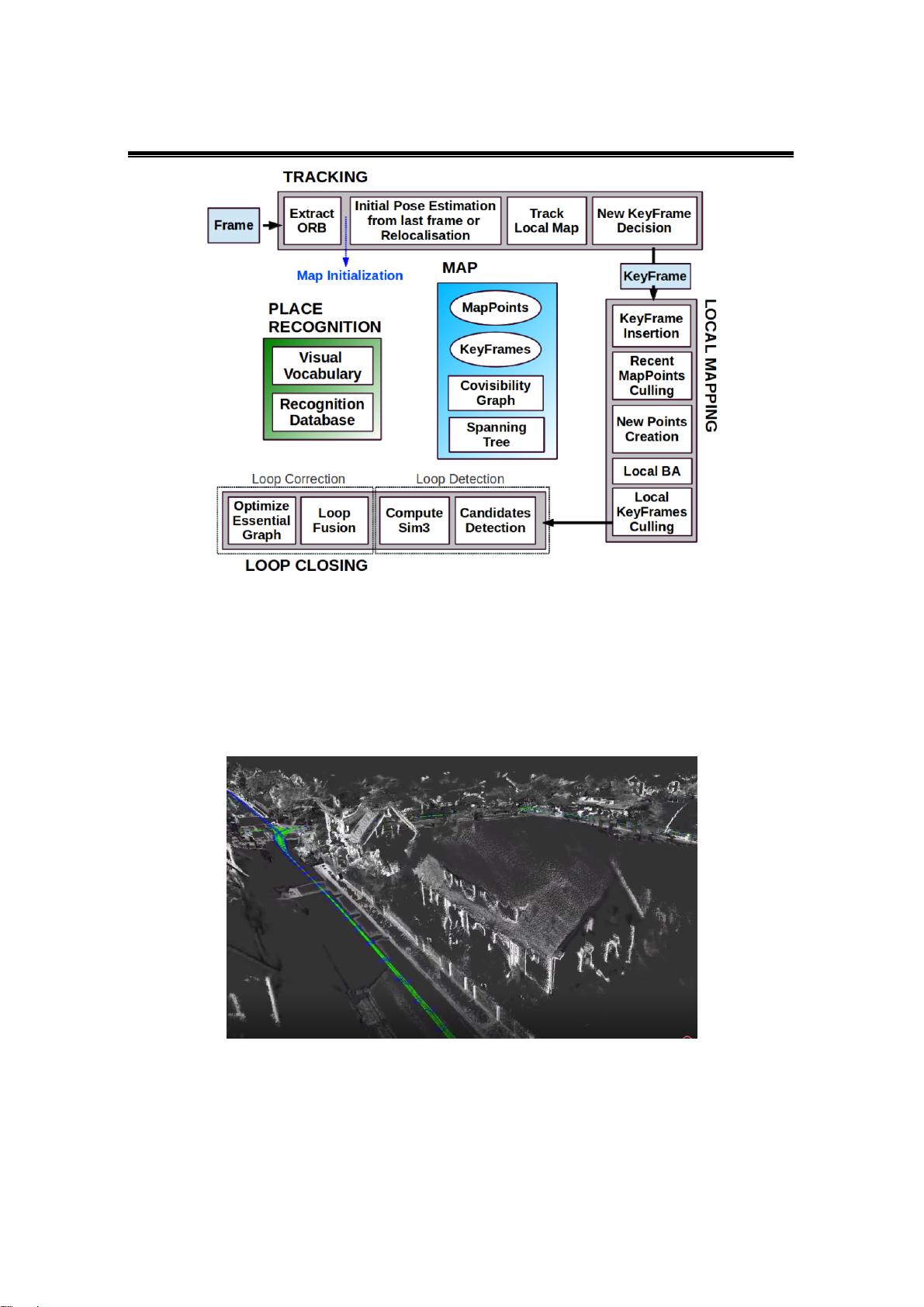
近年来基于特征点法最具代表性的工作是 ORB-SLAM
[44]
。该方案结合了前述
诸多方案的优势,不仅支持单目相机同时还支持双目和 RGBD 相机,其算法框架
在前后端基础上使用了三个线程,分别是实时的 Tracking 线程、局部 Bundle
Adjustment 优化线程以及全局 Pose Graph 回环与优化线程。其算法框架如图 1-4 所
示。


剩余79页未读,继续阅读
2021-02-21 上传
2022-08-03 上传
2021-09-18 上传
2019-03-12 上传
2020-07-29 上传
2022-08-03 上传
2020-09-08 上传
2024-03-07 上传
2023-08-22 上传

深层动力
- 粉丝: 26
- 资源: 318
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
