
01 kernel<<<gD,bD>>>(args)
(a) Original Kernel Call
05 allocate arrays for args, gD, and bD
06 store args in arg arrays
07 store gD in gD array, and bD in bD array
08 new gD = sum of gD array across warp/block
09 new bD = max of bD array across warp/block
10 if(threadIdx == launcher thread in warp/block) {
11 kernel_agg<<<new gD,new bD>>>
12 (arg arrays, gD array, bD array)
13 }
(c) Transformed Kernel Call (called in a kernel)
02 __global__ void kernel(params) {
03 kernel body
04 }
(b) Original Kernel
(d) Transformed Kernel (called from a kernel)
14 __global__ void kernel_agg(param arrays, gD array, bD array) {
15 calculate index of parent thread
16 load params from param arrays
17 load actual gridDim/blockDim from gD/bD arrays
18 calculate actual blockIdx
19 if(threadIdx < actual blockDim) {
20 kernel body (with kernel launches transformed and with
21 using actual gridDim/blockDim/blockIdx)
22 }
23 }
Fig. 2. Code Generation for Aggregation at Warp and Block Granularity
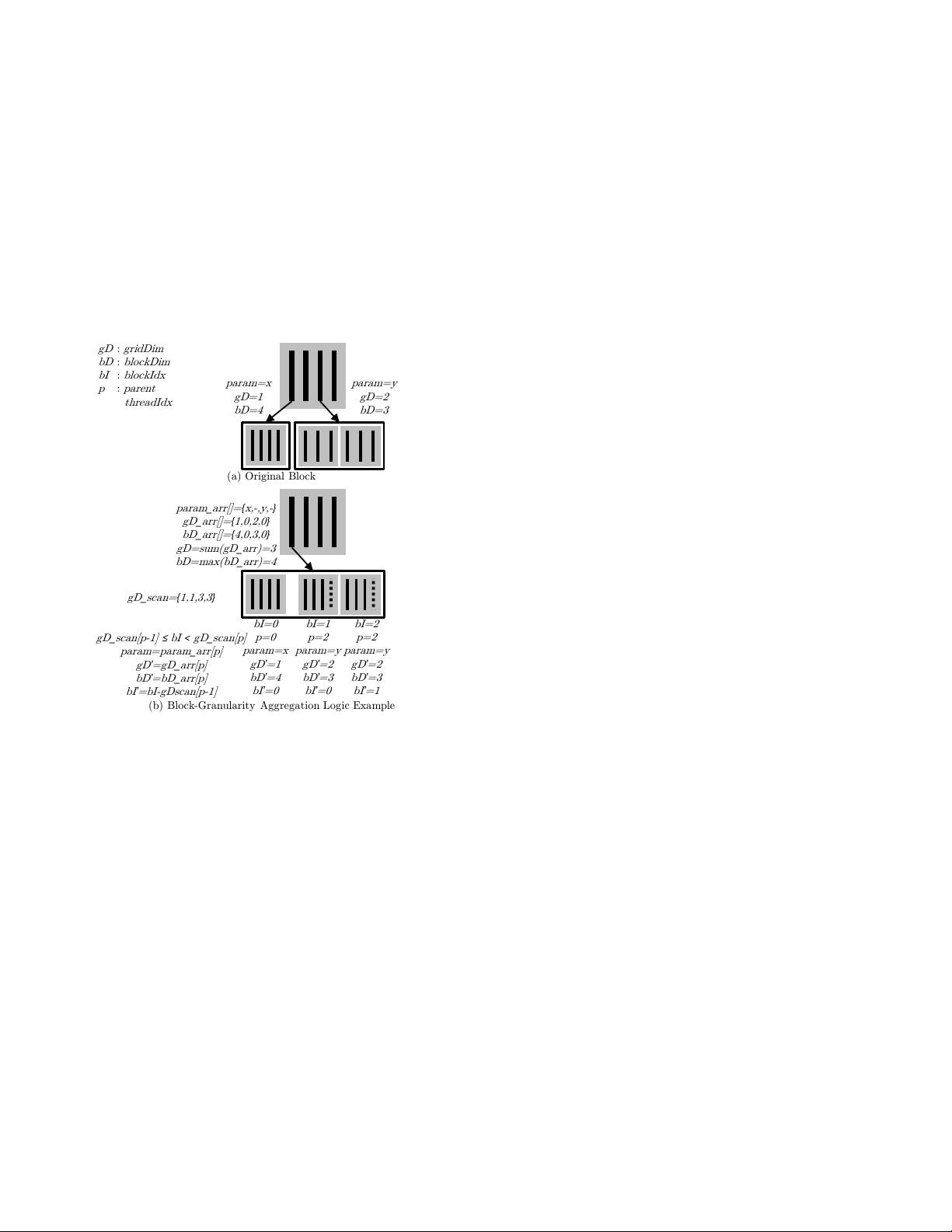
(a) Original Block
param=x
gD=1
bD=4
param=y
gD=2
bD=3
(b) Block-Granularity Aggregation Logic Example
param
_
arr[]=
{
x,-,y,-
}
gD
_
arr[]=
{
1,0,2,0
}
bD
_
arr[]=
{
4,0,3,0
}
gD=sum(gD
_
arr)=3
bD=max(bD
_
arr)=4
gD
_
scan=
{
1,1,3,3
}
gD
_
scan[p-1]
≤
bI
<
gD
_
scan[p]
param=param
_
arr[p]
gD
’
=gD
_
arr[p]
bD
’
=bD
_
arr[p]
bI
’
=bI-gDscan[p-1]
gD
:
gridDim
bD
:
blockDim
bI
:
blockIdx
p
:
parent
threadIdx
bI=0
p=0
param=x
gD
’
=1
bD
’
=4
bI
’
=0
bI=1
p=2
param=y
gD
’
=2
bD
’
=3
bI
’
=0
bI=2
p=2
param=y
gD
’
=2
bD
’
=3
bI
’
=1
Fig. 3. Aggregation Example
uniform across parent threads. Finally, one of the threads in
the warp (or block) launches a single aggregated kernel on
behalf of the others (line 10). For block granularity, a barrier
synchronization is needed before the launch to ensure that
all the threads in the block have completed their preparation
of the arguments and configurations. In the aggregated kernel
launch, the new configurations are used (line 11), arguments
are replaced with argument arrays, and arrays containing the
configurations for each original child are added (line 12).
In addition to transforming kernel launches in all original
kernels, an aggregated version of each original kernel must
also be created. Figure 2(d) shows how the kernel in Fig-
ure 2(b) is transformed into an aggregated version. First, all
parameters are converted into parameter (param) arrays and
configuration arrays are appended to the parameter list (line
14). Next, before the kernel body, logic is added for the
block to identify which thread in the parent warp (or block)
was its original parent (line 15). After identifying its original
parent, the block is then able to load its actual configurations
and parameters (lines 16-18). Threads that were not in the
original child kernel are then masked out (line 19). Finally,
in the kernel body, all kernel launches are transformed into
aggregated kernel launches, and all uses of blockDim and
blockIdx are replaced with the actual values (lines 20-21).
For the block to identify its original parent, it needs to
execute a scan (prefix sum) on the gD (gridDim) array then
search for its position (given by the aggregated blockIdx
value) between the scanned values (using p-ary search [11]). In
practice, since all child blocks need to scan the same gD array,
the scan is instead performed once by the parent before the
array is passed to the aggregated child kernel. Conveniently,
the scan can be performed along with the preparation of the
configuration and parameter arrays in the parent, making it
incur little additional overhead. Since the child kernel needs
both the scan value and the original gD value, it can recover
the original gD value by subtracting adjacent scan elements.
The scan is performed using CUB [12].
The transformed code requires that all threads are active to
perform the scan and max operations. To handle control di-
vergence, a preprocessing pass performs control-flow-to-data-
flow conversion to convert divergent launches to non-divergent
predicated launches so that all threads reach the launch point.
Predication is achieved by multiplying the predicate with the
grid dimension such that launches by inactive threads become
launches of zero blocks.
B. Kernel Granularity
Figure 1(d) illustrates the transformation that takes place
when kernel launch aggregation is applied at kernel granu-
larity. At this granularity, all the original child kernels are
aggregated into a single kernel. Because there is no global
synchronization on the GPU, a single thread cannot be chosen
to launch the kernel on behalf of the others once the others are
ready. Instead, the child kernels are postponed and launched
from the host after the parent kernel terminates. In order
to postpone the kernel launches, this transformation requires
that parent kernels do not explicitly synchronize with their
child kernels, so kernels with explicit synchronization are not
supported at this granularity.
剩余11页未读,继续阅读

weixin_38728624
- 粉丝: 4
- 资源: 881
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


