YOLO: 实时统一目标检测算法
需积分: 0 177 浏览量
更新于2024-08-05
收藏 17.14MB PDF 举报
"YOLO(You Only Look Once)是一种实时目标检测系统,由Joseph Redmon、Santosh Divvala、Ross Girshick和Ali Farhadi等人在2016年提出。它将目标检测视为回归问题,通过单一神经网络模型直接预测图像中的边界框及其对应的类别概率,实现了检测性能的端到端优化。"
YOLO的核心概念是它对传统对象检测方法的创新。传统的对象检测方法通常依赖于分类器,先对图像进行滑动窗口或区域提案,再进行分类。然而,YOLO采取了一种全新的策略,它将整个检测过程整合进一个深度神经网络中,这个网络不仅预测边界框的位置,还同时预测每个边界框内物体的类别概率。这种统一的架构使得YOLO在速度和效率方面具有显著优势。
YOLO模型的工作流程大致如下:首先,输入整张图像到网络中;然后,网络会在预先定义的网格上进行运算,每个网格负责预测一定数量的边界框;接着,每个边界框会输出一组坐标(相对于网格)以及一个类别概率分布;最后,根据这些输出,YOLO确定哪些边界框代表实际的目标物体,并过滤掉非目标的预测。
YOLO的主要优点在于其速度和实时性。基础版的YOLO模型可以在45帧/秒的速度下处理图像,而更小的Fast YOLO版本甚至可以达到惊人的155帧/秒,这使得它在实时应用如自动驾驶、监控系统等领域具有广泛的应用潜力。尽管与其他实时检测器相比,YOLO在定位精度上可能稍有不足,但它能更有效地减少假阳性(误报)的出现,这对于许多实际应用场景来说是非常重要的。
然而,YOLO也存在一些局限性。由于其对大网格的依赖,YOLO在处理小型物体时可能会遇到困难,因为它可能无法精确地定位到这些小目标。此外,YOLO在处理相互重叠的对象时也可能表现不佳,因为每个网格只负责预测有限数量的边界框。这些问题在后续的YOLO版本中得到了一定程度的改进,例如YOLOv2和YOLOv3,它们引入了更多的技术来提升定位精度和处理多尺度物体的能力。
YOLO作为一种统一、实时的目标检测框架,开创了新的方向,对后来的实时检测系统产生了深远的影响。尽管存在一定的局限性,但其高效和实时的特性使其在实际应用中得到了广泛应用,并推动了计算机视觉领域的快速发展。
You Only Look Once:
Unified, Real-Time Object Detection
Joseph Redmon
⇤
, Santosh Divvala
⇤†
, Ross Girshick
¶
, Ali Farhadi
⇤†
University of Washington
⇤
, Allen Institute for AI
†
, Facebook AI Research
¶
http://pjreddie.com/yolo/
Abstract
We present YOLO, a new approach to object detection.
Prior work on object detection repurposes classifiers to per-
form detection. Instead, we frame object detection as a re-
gression problem to spatially separated bounding boxes and
associated class probabilities. A single neural network pre-
dicts bounding boxes and class probabilities directly from
full images in one evaluation. Since the whole detection
pipeline is a single network, it can be optimized end-to-end
directly on detection performance.
Our unified architecture is extremely fast. Our base
YOLO model processes images in real-time at 45 frames
per second. A smaller version of the network, Fast YOLO,
processes an astounding 155 frames per second while
still achieving double the mAP of other real-time detec-
tors. Compared to state-of-the-art detection systems, YOLO
makes more localization errors but is less likely to predict
false positives on background. Finally, YOLO learns very
general representations of objects. It outperforms other de-
tection methods, including DPM and R-CNN, when gener-
alizing from natural images to other domains like artwork.
1. Introduction
Humans glance at an image and instantly know what ob-
jects are in the image, where they are, and how they inter-
act. The human visual system is fast and accurate, allow-
ing us to perform complex tasks like driving with little con-
scious thought. Fast, accurate algorithms for object detec-
tion would allow computers to drive cars without special-
ized sensors, enable assistive devices to convey real-time
scene information to human users, and unlock the potential
for general purpose, responsive robotic systems.
Current detection systems repurpose classifiers to per-
form detection. To detect an object, these systems take a
classifier for that object and evaluate it at various locations
and scales in a test image. Systems like deformable parts
models (DPM) use a sliding window approach where the
classifier is run at evenly spaced locations over the entire
image [10].
More recent approaches like R-CNN use region proposal
1. Resize image.
2. Run convolutional network.
3. Non-max suppression.
Dog: 0.30
Person: 0.64
Horse: 0.28
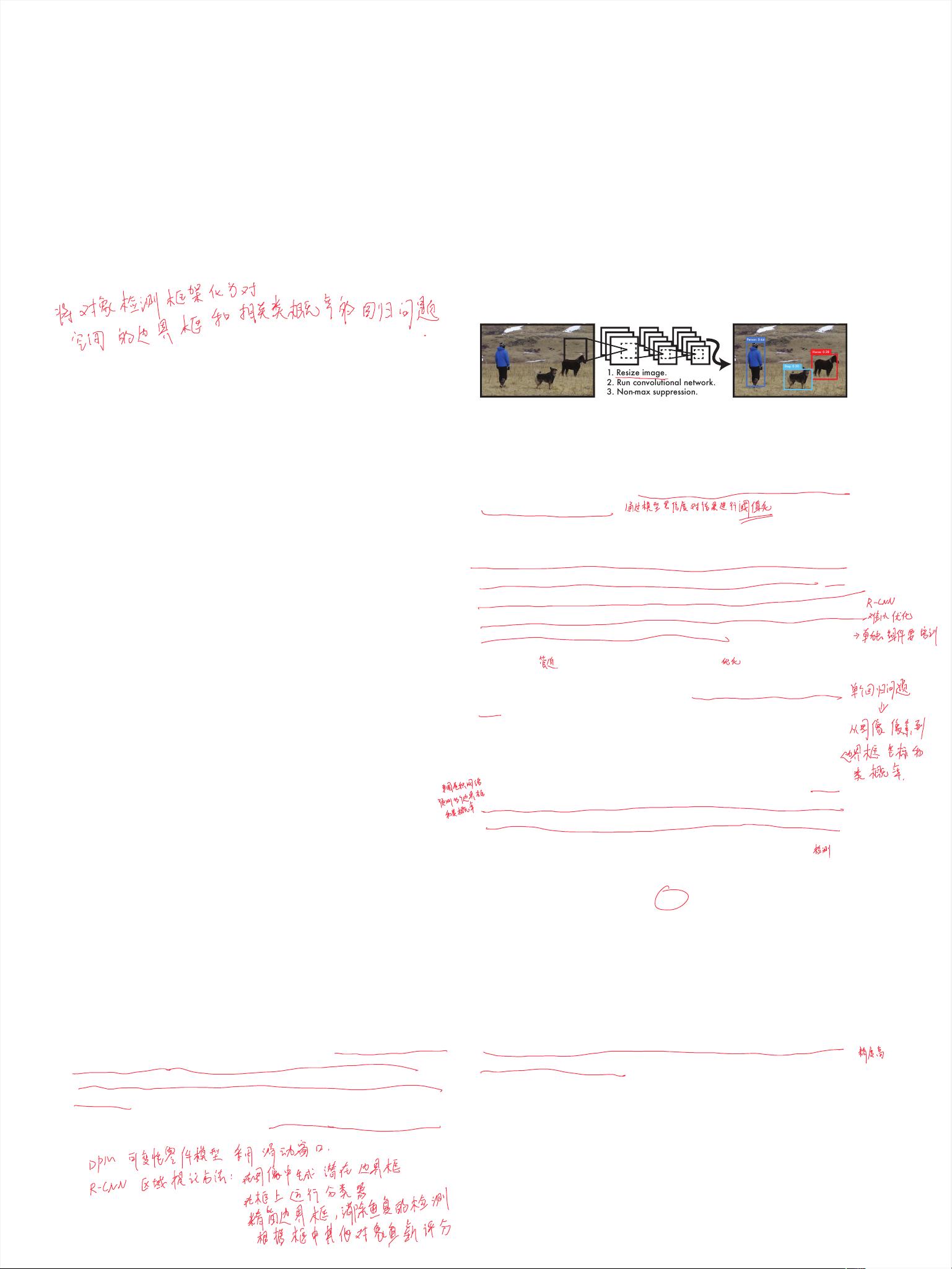
Figure 1: The YOLO Detection System. Processing images
with YOLO is simple and straightforward. Our system (1) resizes
the input image to 448 ⇥ 448, (2) runs a single convolutional net-
work on the image, and (3) thresholds the resulting detections by
the model’s confidence.
methods to first generate potential bounding boxes in an im-
age and then run a classifier on these proposed boxes. After
classification, post-processing is used to refine the bound-
ing boxes, eliminate duplicate detections, and rescore the
boxes based on other objects in the scene [13]. These com-
plex pipelines are slow and hard to optimize because each
individual component must be trained separately.
We reframe object detection as a single regression prob-
lem, straight from image pixels to bounding box coordi-
nates and class probabilities. Using our system, you only
look once (YOLO) at an image to predict what objects are
present and where they are.
YOLO is refreshingly simple: see Figure 1. A sin-
gle convolutional network simultaneously predicts multi-
ple bounding boxes and class probabilities for those boxes.
YOLO trains on full images and directly optimizes detec-
tion performance. This unified model has several benefits
over traditional methods of object detection.
First, YOLO is extremely fast. Since we frame detection
as a regression problem we don’t need a complex pipeline.
We simply run our neural network on a new image at test
time to predict detections. Our base network runs at 45
frames per second with no batch processing on a Titan X
GPU and a fast version runs at more than 150 fps. This
means we can process streaming video in real-time with
less than 25 milliseconds of latency. Furthermore, YOLO
achieves more than twice the mean average precision of
other real-time systems. For a demo of our system running
in real-time on a webcam please see our project webpage:
http://pjreddie.com/yolo/.
Second, YOLO reasons globally about the image when
1
arXiv:1506.02640v5 [cs.CV] 9 May 2016
下载后可阅读完整内容,剩余9页未读,立即下载
2021-04-24 上传
2017-03-14 上传
2023-07-06 上传
2023-05-19 上传
2024-09-06 上传
2023-11-24 上传
2023-01-19 上传
2019-08-14 上传

内酷少女
- 粉丝: 19
- 资源: 302
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
