鱼眼镜头监控系统:无死角自动检测与矫正算法
149 浏览量
更新于2024-08-28
收藏 3.29MB PDF 举报
本文档探讨了一种基于鱼眼镜头的自动监控系统,该系统能够在单个摄像头下实现大面积无死角的监控。鱼眼镜头的独特视角使其在监控领域具有显著优势,能够提供广阔的视野范围,避免传统监控中的盲区问题。研究者提出了一种创新的人体检测方法,这种方法根据候选人体位置动态选择最适应的分类器,提高了识别准确性和效率。
首先,论文关注于如何有效地从鱼眼图像中提取人类区域。由于鱼眼镜头拍摄的图像存在严重的透视失真,因此关键在于设计出一种算法来校正这些畸变,使得在不同光照和拥挤环境下,都能准确地定位到人类目标。这涉及到计算机视觉中的图像处理技术,如多尺度特征分析、图像金字塔构建以及深度学习模型,可能包括卷积神经网络(CNN)等,用于行人检测任务。
实验部分展示了在室内视频序列上的实际应用效果,这些视频包含了各种复杂的照明条件和密集的人群场景。结果显示,该系统的性能在这些条件下表现出高度的鲁棒性与稳定性,证明了其在实际监控环境中的高效性和实用性。实验结果通过对比其他常见的人体检测算法,进一步验证了新方法在减少误报和漏报方面的优越性。
本文的研究代码和数据集可能遵循了光学工程学(110.0110)、计算机视觉(100.0100)以及智能监控系统(150.0150)的标准,这些标签反映了研究内容的技术背景和主要关注点。此外,论文引用了doi:10.3788/COL201109.021101,表明它发表在《中国光学 letters》上,并且在2011年2月10日收到初次投稿,经过修订后于同年10月21日被接受,并于1月28日在线发布。
这项工作不仅提供了鱼眼镜头在自动监控中的有效应用策略,而且通过创新的人体检测算法,为大面积、多变环境下的监控系统设计提供了一种新的解决方案,对安防行业有着重要的实际意义。
February 10, 2011 / Vol. 9, No. 2 / CHINESE OPTICS LETTERS 021101-1
Automatic surveillance system using f ish-eye lens camera
Xue Yuan ( ÈÈÈ)
∗
, Yongduan Song (yyy[[[ààà), and Xueye Wei (ÆÆÆ)
Center for Intelligent Systems and Renewable Energy, Beijing Jiaotong University, Beijing 100044, China
∗
Corresp onding author: xyuan@bjtu.edu.cn
Received June 24, 2010; accepted Octob er 21, 2010; posted online January 28, 2011
This letter presents an automatic surveillance system using fish-eye lens camera. Our system achieves
wide-area automatic surveillance without a dead angle using only one camera. We propose a new human
detection method to select the most adaptive classifier based on the locations of the human candidates.
Human regions are detected from the fish-eye image effectively and are corrected for perspective versions.
An experiment is performed on indoor video sequences with different illumination and crowded conditions,
with results demonstrating the efficiency of our algorithm.
OCIS co des: 110.0110, 100.0100, 150.0150.
doi: 10.3788/COL201109.021101.
Due to large field of view, wide-angle lens are popu-
larly used for various applications, such as surveillance,
robotic navigation, and semi-automatic parking systems.
Because the angle of view of the fish-eye lens used in
our system was up to 185
◦
, it achieved effective wide-
area surveillance without a dead angle only one camera.
However, it brought an inherent distortion in the image,
and this distorted image must be rectified or restored in
order to recognize and understand the image accurately.
Human detection and tracking is a necessary approach
for automatic surveillance systems. However, in the im-
age taken by our surveillance system, the region where
human enters the surveillance space is distorted and it is
difficult to detect humans using the original method in-
troduced in Refs. [1−9]. To our knowledge, there is still
no reliable pedestrian detection algorithm reported for
fish-eye image. Refernece [10] proposed human detection
method using fish-eye image to detect ellipses from the
subtraction images of fish-eye pictures as human area.
However, in a more crowded situation and when sudden
illumination changes occur, their method shows a clear
increase in false alarm rate.
In order to improve the efficiency of human detection
on fish-eye images even in crowded indoor environments,
we propose a human detection method. The rotations
and sizes of the human regions on the fish-eye image
change based on the locations of humans in the surveil-
lance area. We propose a method to normalize these
regions. Because a fish-eye lens camera is set on top of
the surveillance area, the shapes of humans are changed
based on their locations in the surveillance area. In
this letter, we create three types of classifiers to detect
humans in any part of the surveillance area; the most
adaptive classifier for each human is chosen automati-
cally from several classifiers. Moreover, we propose a
method to minimize the occlusion effects. We infer the
possible occlusion region in each human candidate region
based on its location on the fish-eye image. Once the
occluded regions are detected, the occlusion effects can
be minimized by adjusting the threshold of the classifier.
Unlike other systems such as those proposed in Refs.
[11,12], the human regions in our proposed method are
detected initially from the fish-eye image, and only the
human regions are corrected afterwards. In other sys-
tems, the entire input fish-eye images are corrected
first and then the human regions are detected from
the corrected images. Using our system, the processing
efficiency can be improved and the processing time can
be significantly reduced.
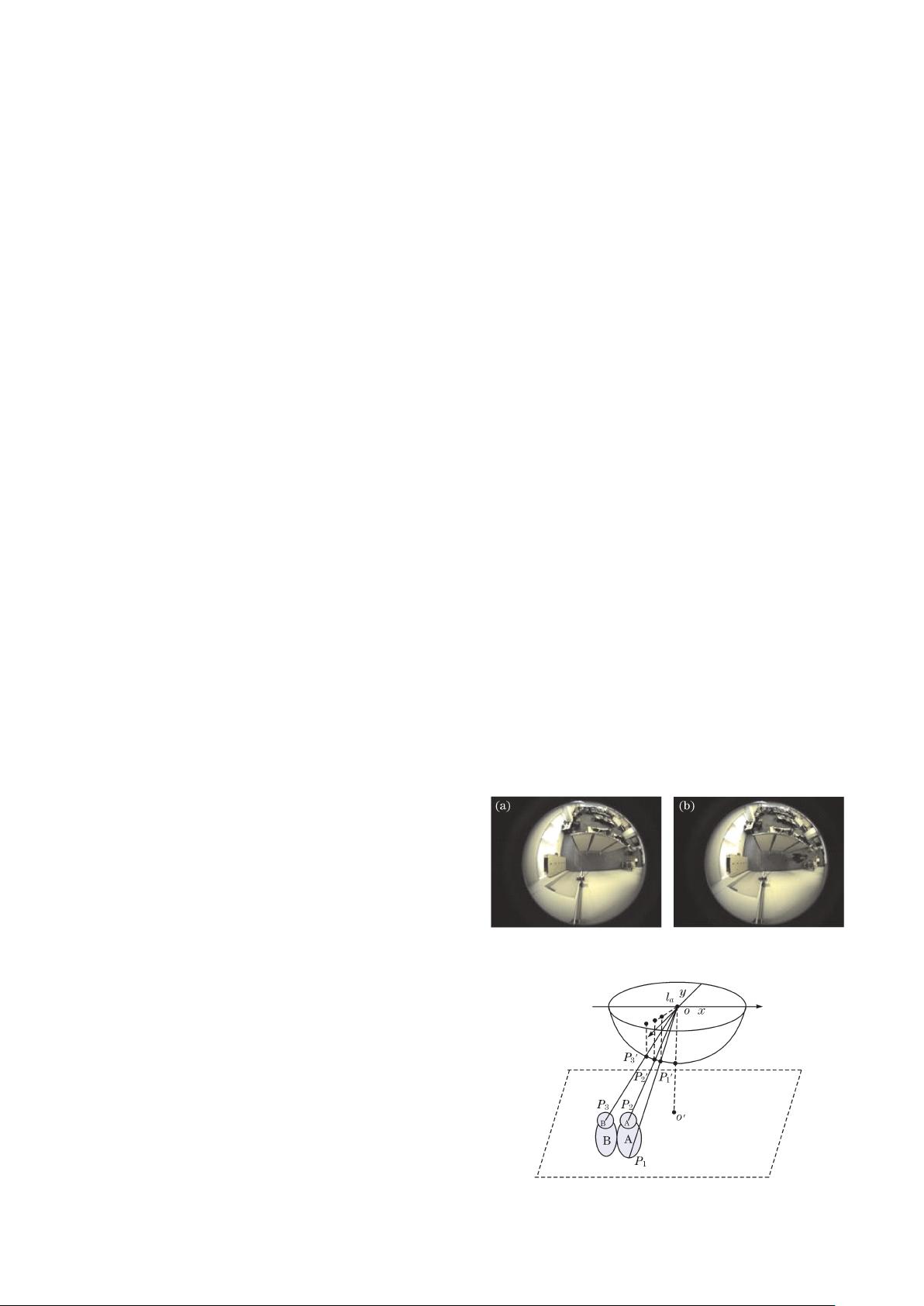
The system is designed as illustrated in Fig. 1, wherein
the fish-eye lens camera is set on top of the surveillance
area. The input image of the fish-eye lens camera is illus-
trated in Fig. 2, with the background image illustrated
in Fig. 2(a) and the input image illustrated in Fig. 2(b).
The edges of the background and input images are
extracted using Sobel operator
[13]
as illustrated in Figs.
3(a) and (b). In addition, the subtraction image between
the input edge image and the background edge image is
computed, as illustrated in Fig. 3(c). As shown in Fig.
3, all the head edges look like ellipses; thus, an efficient
ellipse detection method
[14]
is adopted to extract the el-
Fig. 1. Image taken by the proposed surveillance system. (a)
Background image; (b) input image.
Fig. 2. Proposed surveillance system.
1671-7694/2011/021101(5)
c
° 2011 Chinese Optics Letters
下载后可阅读完整内容,剩余4页未读,立即下载
2021-02-10 上传
391 浏览量
1112 浏览量
283 浏览量
168 浏览量
137 浏览量
352 浏览量
163 浏览量
371 浏览量

weixin_38717450
- 粉丝: 8
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







