ROS教程:移动机械臂与小车模型构建
需积分: 0 5 浏览量
更新于2024-06-30
收藏 2.63MB DOCX 举报
在"Part 2 ROS学习笔记1"中,章节三聚焦于ROS(Robot Operating System)项目中的移动机械臂建模和连接。本节内容详细介绍了如何在ROS Robotics Projects Second Edition的第三章中构建一个移动小车模型和机械臂模型,并将其整合在一起。
首先,章节的起点是初始化工作空间。这包括启动roscore服务,创建一个新的工作空间结构,通过`catkin_init_workspace`命令来初始化,并使用`catkin_create_pkg`创建名为"robot_description"的包。接着,通过`catkin_make`编译所有依赖项,确保ROS环境的配置正确。
接下来,作者引入了URDF(Unified Robot Description Format)模型,这是一种标准格式用于描述机器人的几何结构、链接、关节和传感器。在urdf文件夹中,使用`.urdf.xacro`形式定义连杆,包括其原点、几何形状、材质和颜色。对于轮子,定义了一个自包含的xacro文件,可以在其他URDF文件中通过`source`指令调用,实现复用性。
在URDF文件中,`<collision>`标签用于定义链接的碰撞检测区域,而`<inertial>`标签则用于指定物体的质量、惯性属性。为了模拟现实世界中的物理行为,还涉及到驱动信息的定义,如使用`<transmission>`标签来指定传动类型和驱动器,并通过`<joint>`标签定义相应的关节类型。
章节的重点落在了控制器的定义上,这里引入了Gazebo,一个广泛使用的3D模拟环境。通过创建`gazebo_essentials_base.xacro`文件,作者将Gazebo ROS Control模块集成进来,以便于在Gazebo中控制机械臂的运动。此外,还涉及到了微分驱动模型(Differential drive)的实现,以及通过xacro定义轮子的摩擦特性。
这部分内容展示了ROS在构建复杂机器人系统中的关键步骤,从模型设计、URDF编排到与Gazebo环境的交互,都是为了让机器人在仿真环境中能够真实地运行和响应。读者可以借此学习如何在ROS生态系统中设计、测试和调试机器人系统。
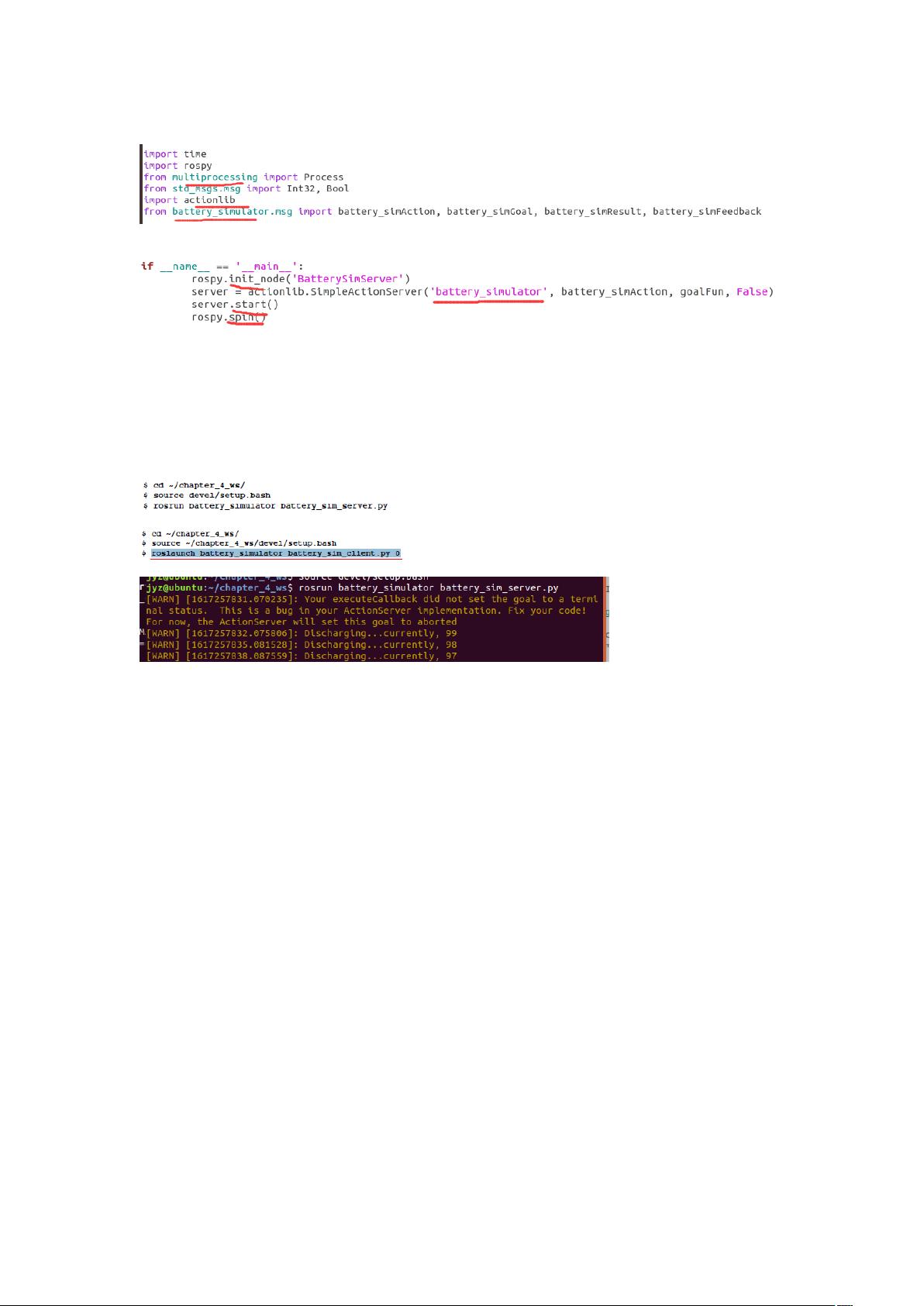
必要声明:multiprocessing 多进程;从 battery_simulator 包中发送 actionlib 信息
主函数:初始化节点和服务端,开启服务端,.spin 为保持服务端运行
定义两个并行的函数,goalFun()和 batterySim()
GoalFun()函数根据 charge_state 设置为参数 1 和 0,表示是否在充电中
BatterySim()函数检查参数 1 和 0,根据 charge_state 参数决定运行哪一个代码
定义客户端 client——battery_sim_client.py 文件
类似前一个案例:包括必要声明、主程序、定义
运行
开启服务端
开启客户端,改为 rosrun
3. 餐厅服务生机器人简介
到桌点单,确认点单,送餐——伪代码
还需要监控电量,不够时要去充电,换另一个机器人替代
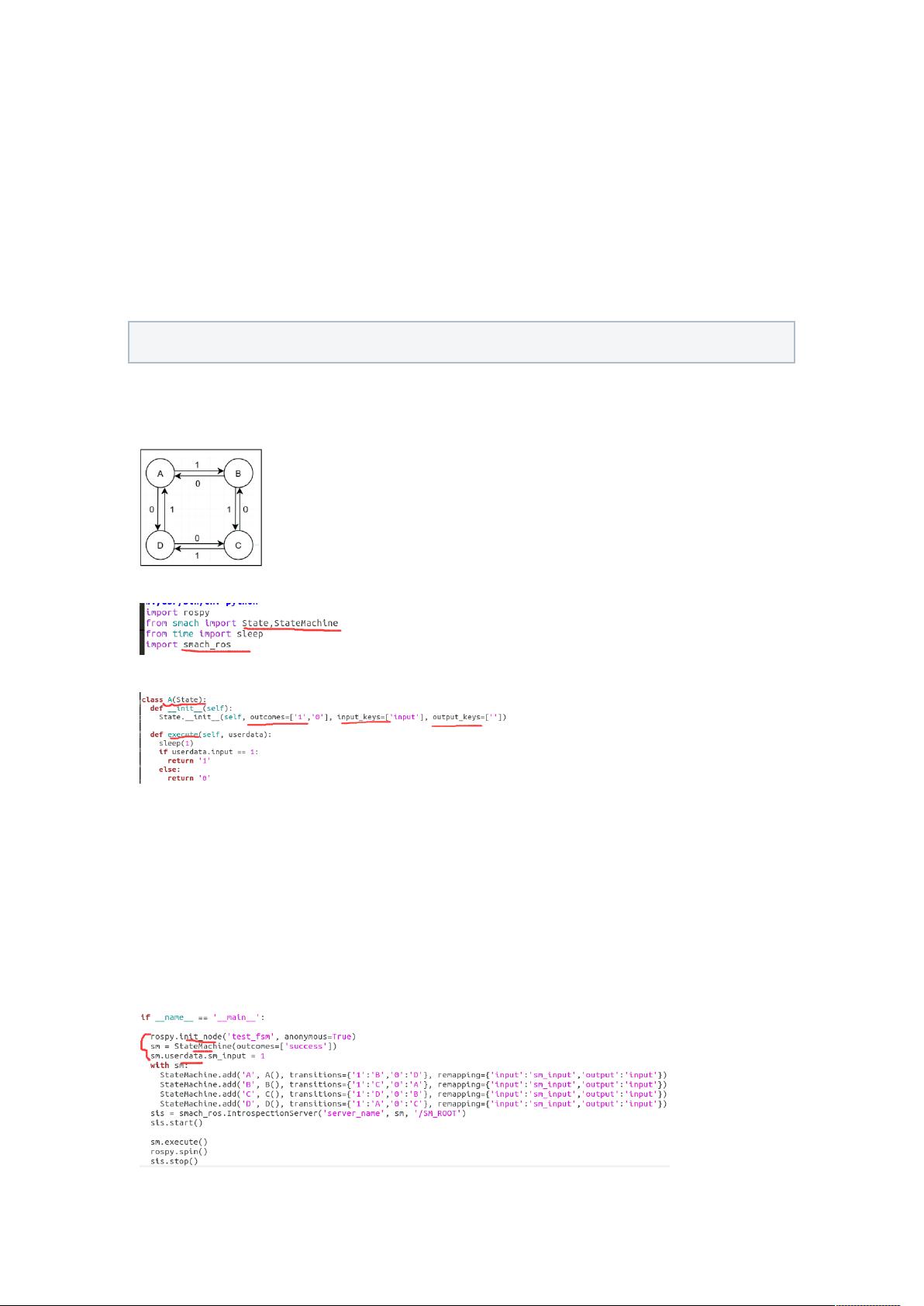
4. 状态机 state machine 简介
将问题进行图形表达,任务分解成小的操作
框:代表一个特定状态
Edge:连接两个状态,表示两个状态间的转换
Edge 上的值或描述:表示此状态的 outcome(完成情况),成功失败或正在进行
5. SMACH 简介
SMACH 是一个 python 库,处理复杂机器人行为,构建分层或同时的状态机
Smach_roc package 包,用来支持 ROS 的使用
概念:状态 state,ROS 中用 execute()函数定义行为或 action
Container:状态的集。表示执行的策略——分层的 hierarchical,同时的 concurrent,或分
段的 iterative
**SMACH 中的概念
Outcome:状态的可能结果-执行完动作后的状态反馈,用于状态转换。在 execute()框后
User data:状态转换所需要的条件,input(执行需要的) and output(状态反馈的) keys
Preemption:抢占?是一种中断状态
剩余44页未读,继续阅读
2020-06-09 上传
2016-12-02 上传
2021-01-06 上传
2019-03-17 上传
2019-03-17 上传
2021-01-20 上传

ask_ai_app
- 粉丝: 24
- 资源: 326
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
