改进PointNet的多尺度深度学习:LiDAR点云复杂场景分类
需积分: 0 73 浏览量
更新于2024-08-05
收藏 1.71MB PDF 举报
本文主要探讨了在LiDAR点云数据处理领域中的一个重要课题——复杂场景下的地物分类。LiDAR(Light Detection and Ranging)是一种遥感技术,通过激光脉冲测量目标物体的距离,生成高密度的点云数据,广泛应用于地形测绘、自动驾驶等领域。在这些应用场景中,准确地识别和分类地物点云对于后续的分析和决策至关重要。
文章的核心创新是提出了一种融合多尺度特征和PointNet的深度神经网络模型。PointNet是一种经典的用于处理不规则数据结构(如点云)的网络,它能够直接处理点云数据的原始形式,无需预处理成固定形状的输入。然而,PointNet在提取局部特征时可能存在一定的局限性,特别是对于复杂场景中的地物,可能无法充分捕捉不同尺度和细节信息。
为了克服这个问题,作者在PointNet的基础上加入了多尺度网络结构。这个结构允许网络同时捕获不同尺度的局部特征,通过多个不同感受野的卷积层来适应点云中不同大小的空间特征。这些不同尺度的局部特征被组合成一个多维特征向量,与PointNet提取的全局特征相结合,共同决定了每个点的类别概率。这种结合增强了模型对复杂场景中地物多样性的理解和识别能力。
实验部分,作者选择了Semantic3D数据集和ISPRS提供的Vaihingen数据集作为验证平台。这两个数据集包含了丰富的地物类型和复杂的环境场景,能够全面评估算法的性能。实验结果显示,相比于其他现有的点云分类神经网络,作者提出的算法在分类精度上取得了显著提升,这证明了其在处理复杂LiDAR点云地物分类任务上的优势。
这篇论文的贡献在于提出了一种有效的深度学习框架,通过结合多尺度特征和PointNet,提高了LiDAR点云地物分类的准确性,并在实际数据集上得到了验证。这对于提高LiDAR点云处理的效率和精度,推动相关领域的研究和应用具有重要意义。未来的研究可以进一步探索如何优化网络架构或引入更先进的深度学习技术,以进一步提升地物分类的鲁棒性和泛化能力。
N´
D
MLP
N´
D'
Max
pool
1´ D'N´ 3 MLP N´ D+D'
N´ 3
N´ 3
N´ 3
MLP
MLP
MLP
Max
pool
Max
pool
Max
pool
1´ D''
Scale 1
Scale 2
Scale 3
C
C
C
N´ D+D'
+D''
MLP N´ M
Input
Output
score
T-net
T-net
T-net
T-net T-net
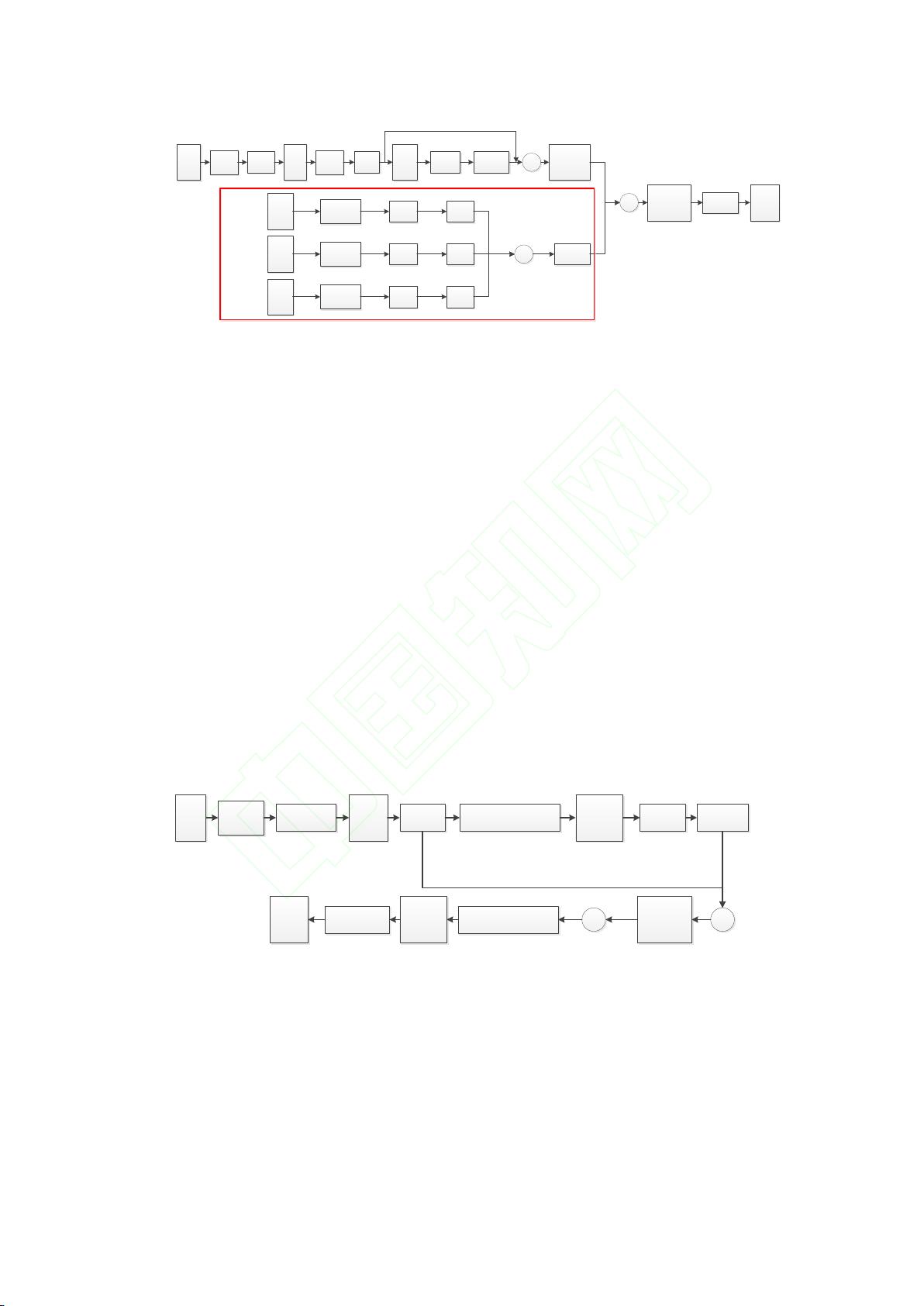
图 1 多尺度特征与 PointNet 结合的深度神经网络模型
Fig. 1. Deep neural network model combining multiscale features with PointNet
2.1 PointNet
本文是在 PointNet 网络结构基础上进行机载 LiDAR 点云数据分类。PointNet 是第一种
直接处理无序点云数据的深度神经网络。一般情况下,深度神经网络要求输入信息具有规范
化的格式,比如二维的图像,时序性的语音等。而原始三维点云数据往往是空间中一些无序
点集,假设某一个点云中包含 N 个三维点,每一个点用(x,y,z)三维坐标表示,即使不考虑遮
挡,视角等变化,单就这些点的先后顺序排列组合,就有 N!种可能。因此需要设计一个函
数,使得函数值与输入数据的顺序无关。实际上,在代数组合学中,这类函数被称为对称函
数。PointNet 中,作者使用了 Max Pooling 层作为主要对称函数,这种处理虽然简单,但是
实验证明效果较好。PointNet 网络用式(1)来表示。
=1,...,n
( , ,..., ) (max{ ( )})
1 2 n i
i
x x x xfh
(1)
式中
, ,...,
1 2 n
x x x
是输入的无序点云,
d
i
xR
。f 为连续集函数,将一组点映射到一个
向量。
和
h
都是连续函数,代表了多层感知机网络(MLP)。 式(1)中连续集函数 f 对输
入点的排列是不变的,并且可以近似任意连续集函数,输入点中少量的噪声点对函数值没有
影响。
N´ 64
MLP
(64,128,1024)
N´
1024
Max
pool
1´ 1024N´ 3
MLP
(64,64)
N´ 1088C C
MLP
(512,256,128)
N´ M
Input
Output
score
T-Net
(3)
T-Net
(64)
N´ 128
MLP
(128,m)
图 2 PointNet 网络架构
Fig. 2. PointNet Network Architecture
上图是 PointNet 网络架构,输入是包含 N 个点的三维点云的三维坐标(N´3) , 原始数据
通过一个 3D 空间变换矩阵预测网络 T-Net(3),估计出 3´3 的变换矩阵 T(3) 并作用在原始数
据上,实现数据的对齐。对齐后的数据会以点为单位,通过一个共享参数的双层感知机模型
MLP(64,64)进行特征提取 。每个点提取出 64 维特征,再通过特征空间变换矩阵预测网
络 T-Net(64) 预测 64´64 变换矩阵,作用到特征上,实现对特征的对齐。然后继续利用三层
感知机(64,128,1024)进行以特征点为单位的特征提取,直到把特征的维度变为 1024,再通
过最大池化层提取出点云的全局特征向量。
剩余11页未读,继续阅读
565 浏览量
319 浏览量
565 浏览量
120 浏览量
2022-08-03 上传
412 浏览量
292 浏览量
238 浏览量
144 浏览量

WaiyuetFung
- 粉丝: 935
- 资源: 316
 我的内容管理
展开
我的内容管理
展开







最新资源
- BasicFormControlPART1:如何在不关闭应用程序的情况下打开和关闭其他表单。-开源
- blog_app:博客项目
- 滑冰
- namma_utpanna
- 全国行政区划json文件
- ABlog
- 网络连接查看器 365TcpView(网络连接查看器) v3.0
- raptor_infiltrate19:#INFILTRATE19猛禽派对包
- 易语言直接使用通用型
- crux-themes-5.0.2.zip
- OSXvnc:适用于macOS的VNC服务器
- storybook-addon-image-snapshots:Storybook插件,用于基于@ storybookaddon-storyshots-puppeteer插件获取故事的图像快照
- kodluyoruzilkrepo:我在编码培训中打开了第一个回购协议
- pulumi-eks:一个Pulumi组件,可轻松创建和管理Amazon EKS集群
- 易语言硬盘分区找文件
- L128864ST7922C,c语言过tp驱动源码,c语言程序
