MATLAB实现的ICP算法改进:kd-tree与指派问题优化
 已收录资源合集
已收录资源合集
需积分: 0 66 浏览量
更新于2024-07-02
3
收藏 1.59MB PDF 举报
本文主要探讨了二维点云配准技术的一种创新方法,结合了ICP算法和kd-tree的数据结构,以提高点云配对的精度和效率。首先,文章从传统的ICP算法出发,分析其存在的问题,如点云对应点匹配的不准确性、特殊点可能导致的优化方向偏离以及局部最优解的困扰。ICP算法,特别是迭代最近点匹配,虽然在许多领域广泛应用,但其局限性促使研究者寻求改进。
在MATLAB2022的环境下,作者实现了对ICP算法的改进,特别是在点云配对的指派问题上,引入了kd-tree数据结构,这是一种空间分割数据结构,能够有效地组织和查找数据,从而加快匹配过程,减少误匹配的可能性。通过动态阈值设置,进一步提升了匹配的精确性和算法的执行速度。
在点云配准过程中,三角剖分技术,如delaunay三角化,被用于增强算法的鲁棒性,它通过对点集进行划分,使算法对初始数据分布的变化更为敏感。这种方法有助于减少对初始配置的依赖,提高算法在不同场景下的适应性。
尽管文章的编程实现部分包含在MATLAB的函数文件中,但未提供完整的.m文件,但提供了核心算法的伪代码,以便读者理解并可能进行进一步的优化。作者在实验和分析的基础上,明确了下一步的改进方向,这表明该研究不仅限于理论探讨,而是紧密结合实际问题,具有较高的实用价值。
通过本文,读者不仅能了解ICP算法的基本原理,还能学习如何利用kd-tree和三角剖分技术提升点云配准的性能,这对于从事图像处理、模式识别或无人驾驶等领域的人来说,是一份有价值的参考资料。
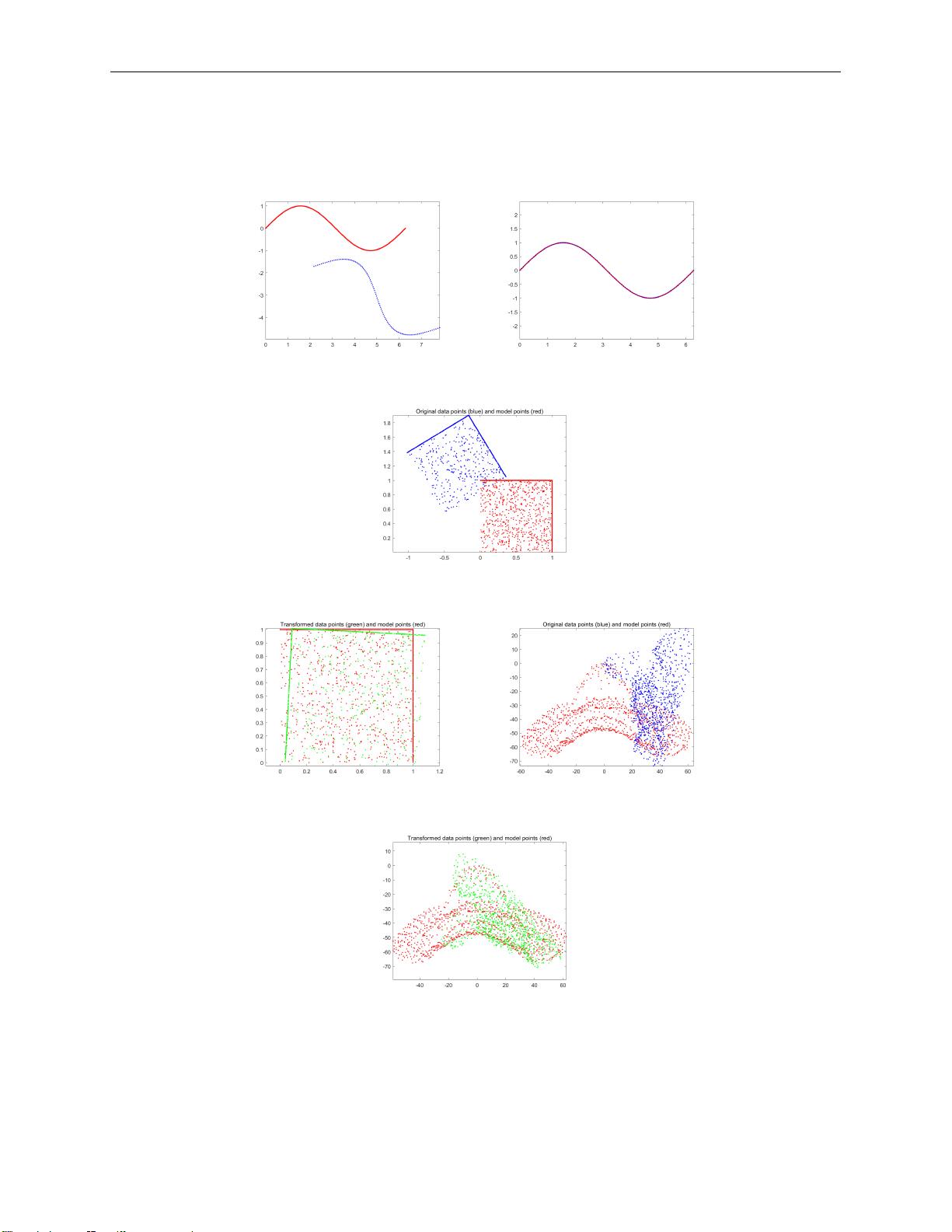
Figure 3: sin 原始图 Figure 4: sin 配准图
Figure 5: 正方随机点云原始图
Figure 6: 正方随即点云配准图 Figure 7: 脸部点云原始图
Figure 8: 脸部点云配准图
4
剩余17页未读,继续阅读
2018-04-04 上传
2023-10-07 上传
2022-08-04 上传
2024-10-20 上传
点击了解资源详情
2021-09-18 上传
2021-05-20 上传

weixin_61527324
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
