定向传感器网络的概率覆盖模型与容错设计
66 浏览量
更新于2024-08-28
收藏 2.4MB PDF 举报
"Probabilistic Coverage in Directional Sensor Networks" 是一篇发表于2017年8月4日的研究论文,由Pengju Si、Chengdong Wu、Yunzhou Zhang、Hao Chu和He Teng合作完成,收录在Springer Science+Business Media出版物中。本文主要关注的是在定向传感器网络(DSNs)中的概率感知模型设计,这对于环境监测的传感器网络性能至关重要。
在传统上,环境因素和传感器本身的内在特性会显著影响定向传感器的感知能力,这使得简单的二元感知模型不再适用。因此,作者提出了对定向传感器网络进行更深入研究的必要性,旨在开发出更具实用性的概率感知模型。首先,他们参考了对全向传感器的普适概率感知模型,探讨了如何将这种模型应用于定向传感器的场景。
论文的核心贡献之一是提出了一个基于指数衰减的概率感知模型。这个模型考虑了环境因素对传感器敏感度的影响,通过数学建模,能够更好地反映实际环境中定向传感器的响应可能性随距离的变化趋势。这意味着模型能够更准确地估计在不同方位和距离下,传感器成功检测目标的概率。
接下来,为了提高系统的鲁棒性,作者进一步提出了一个故障容忍概率感知模型。他们考虑了两种主要类型的错误:定向误差(即传感器指向方向的不确定性)和旋转误差(传感器自身角度的偏离)。通过引入容错机制,即使在存在这些误差的情况下,模型也能保持一定程度的准确性,确保网络的正常运行。
最后,结合指数衰减概率和故障容忍概率,论文构建了一个混合概率感知模型。这个模型综合了两者的优点,既能适应复杂多变的环境,又能处理传感器的非理想行为,从而提高了DSNs的整体覆盖率和可靠性。
总结来说,"Probabilistic Coverage in Directional Sensor Networks"这篇论文着重于针对定向传感器网络的特殊性,提出了一套包含指数衰减概率、故障容忍性和混合策略的概率感知模型。这些模型的引入对于提升定向传感器网络在环境监测任务中的效能具有重要意义,对于研究者和工程师来说,提供了重要的理论支持和实践指导。"
intruders in different scenarios. In order to detect an
intruder, Onur et al. proposed the probabilistic detection
model with false alarm rate in [22].
Compared with traditional omni-directional sensors,
directional sensors provide much richer information of the
environment in the forms of images or sounds and hence
promise a huge potential in applications [2, 6]. Almost
existing works about DSNs considered the sensing model of
directional sensor as a sector, which is also the boolean
sensing model [10]. Yildiz et al. [28] investigated the problem
of determining optimal camera placement to achieve angular
coverage continuously over a given region. Some deployment
strategies for satisfying given coverage probability require-
ments with sectorial sensing models were designed in [19].
Most of existing works focused on considering the sensing
model for DSNs as a deterministic sensing model, ignoring
extraction the probabilistic factors. Then, more practical
factors for DSNs should be considered to better complete the
DSNs. Especially, Ahmed et al. [1] investigated the coverage
issues in wireless sensor networks based on probabilistic
sensing model and proposed a probabilistic coverage algo-
rithm to compute the coverage probability. The assumption is
valid for certain kind of sensors, which include the acoustic
sensor as a directional sensor. However, they only introduce
the sensor’s characteristics of signal propagation. Hence, in
this paper, we propose different sensing models for DSNs,
which consider more probabilistic factors.
3 Sensing models
In this section, the sensing models for DSNs are discussed.
Based on the deterministic sector sensing model, we first
study two more realistic probabilistic sensing models,
which are called exponential decay probabilistic sensing
model and fault-tolerant probabilistic sensing model,
respectively. Then, a hybrid probabilistic sensing model for
DSNs is proposed by combining the above sensing models.
3.1 Deterministic sensing model
The commonly-used deterministic sector sensing model sim-
plifies the coverage problem. Almost all the previous works
have been considered the sector sensing model for DSNs.
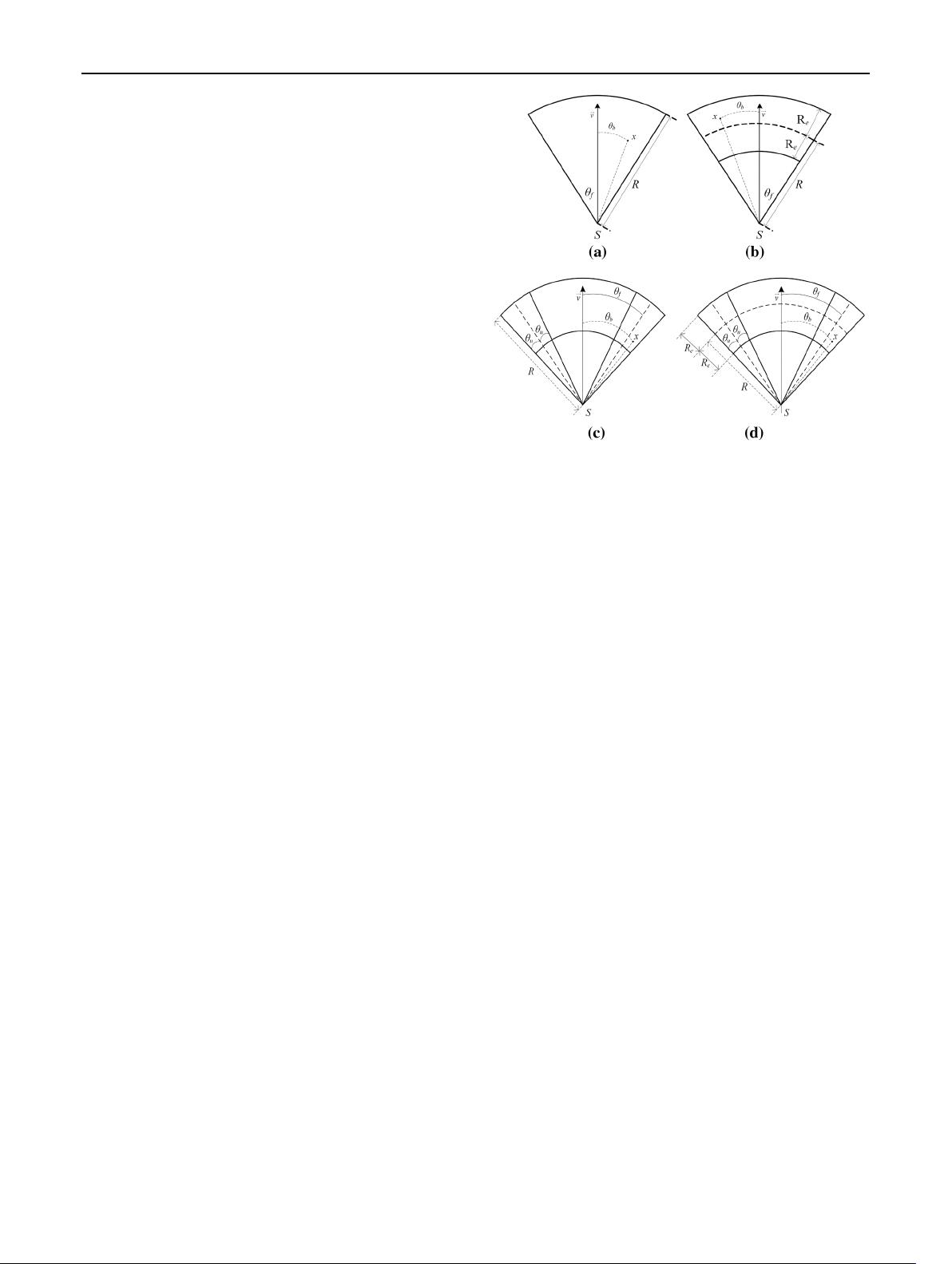
As depicted in Fig. 2(a), the deterministic sensing area
of directional sensor is sector-shaped region, which can be
denoted by 4-tuple ðS; R; h
f
; v
!
Þ. S is the location coordi-
nate in a two-dimension plane, and it also denotes the
directional sensor. R points out the maximum sensing
radius. h
f
indicates sensing offset angle which equals to the
half of the vertex angle of sector. Note that the omni-
directional sensing model is a special case of the deter-
ministic directional sensing model when h
f
¼ p. v
!
is a
unit vector, and denotes the viewing angle, which repre-
sents the orientation of a directional sensor.
It can be determined whether a point x is covered by the
directional sensor S or not by the following:
Sx
jj
R ð1Þ
Sx
!
v
!
Sx
!
cos h
f
ð2Þ
In other words, the deterministic sensing model for DSNs
can be described by:
pðxÞ¼
0; ðd [ RÞ_ h
b
[ h
f
;
1; ðd RÞ^ h
b
h
f
:
ð3Þ
where d and h
b
are the euclidean distance between x and
S and the offset angle between Sx
!
and orientation of
directional sensor, respectively.
3.2 Exponential decay probabilistic sensing model
Probabilistic sensing models assume that the sensing prob-
ability is a decreasing function of the sensing distance.
Actually, Sensors typically perform the sensing task proba-
bilistic—for two main reasons: (i) The signal propagation
from a target to a sensor follows a probabilistic model [1].
The probability of detection of a target by a sensor decreases
exponentially with increase in distance between the target
and sensor. (ii) Especially for underwater acoustic sensors,
the signal roughly decays based on the path loss log normal
shadowing model by blocking effect of water.
As shown in Fig. 2(b), the exponential decay proba-
bilistic sensing model for DSNs can be defined by 5-tuple
Fig. 2 Sensing models for DSNs: a deterministic sensing model;
b exponential decay probabilistic sensing model; c fault-tolerant
probabilistic sensing model; d hybrid probabilistic sensing model
Wireless Netw (2019) 25:355–365 357
123
剩余10页未读,继续阅读
125 浏览量
2009-12-22 上传
2021-02-09 上传
2009-05-15 上传
2015-07-07 上传
2024-07-09 上传
2021-02-11 上传
2021-02-10 上传

weixin_38607026
- 粉丝: 9
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
