自平衡小车的滤波器自适应滑模控制策略
"滤波器自适应滑模控制器在自平衡小车中的应用"
自平衡小车,也称为倒立摆系统,是一种具有高度不稳定性的双轮机器人。它需要精确的控制策略来保持直立,同时执行如避障、跟踪和路径规划等复杂任务。由于其动态特性包括非线性、多变量、强耦合、时变和参数不确定性,因此对控制器的设计提出了挑战。
滑模控制是一种有效的控制策略,尤其适用于存在不确定性和时变参数的系统。传统的滑模控制器利用趋近律来确保系统最终到达一个预设的“滑动表面”,从而实现稳定。然而,这种控制器可能会引起“抖振”现象,即系统在接近滑动表面时产生的快速振荡,这可能会影响系统的性能和稳定性。
为了解决这一问题,文中提出了一种改进的控制方案,即滤波器自适应滑模控制器。该控制器结合了自适应控制和广义卡尔曼滤波器(Extended Kalman Filter, EKF)。自适应控制允许控制器根据系统的实时行为调整其参数,以适应参数不确定性。而EKF则是一种非线性状态估计方法,能有效地处理系统中的非线性动态和噪声。
在自平衡小车中,由于实际倾斜角速度难以准确测量,且倾角传感器的测量结果可能不满足控制需求,EKF被用来在线估计系统的状态。EKF通过融合多个传感器的数据,可以滤除噪声,提供更准确的系统状态估计,从而帮助控制器更好地控制小车的平衡。
通过在自平衡小车上实施该控制器,并进行对比仿真研究,结果显示滤波器自适应滑模控制器能够有效地抑制系统噪声,减少抖振,提高控制性能。这种方法为解决自平衡小车的控制问题提供了一种有前途的解决方案,同时证明了其在实际应用中的有效性。
这篇文章深入探讨了如何将自适应控制理论与滤波技术相结合,以优化滑模控制器在自平衡小车控制中的应用,这对于理解高级控制策略在实际复杂系统中的实现具有重要的理论和实践意义。
第 38卷 第 5期
2008年 9月
航 空 计 算 技 术
Aeronautical Computing Technique
V01_38 No.5
Sep.2008
滤波器 自适应滑模控 制器 在 自平衡 小 车 中的应 用
任金星,屈胜利,骞少辉
(西安 电子科技大 学 机电工程 学院,陕西 西安 710071)
摘 要 :在传统趋近律滑模控制器基础上采 用一种改进 的滑模控制 器—— 自适应 滑模 控制 器,同时
针对 小车运动时真 实倾斜 角速度不 易测量 ,而倾 角传感器测得 的角速度满足 不 了要 求 ,为此设计 了
广 义卡 尔曼滤波器来在 线估计非 线性 系统 的状 态 ,有 效抑制 了系统噪 声干扰 ,消弱 了抖振 ,应 用在
自平衡 小车上 ,验证 了控制 器的有效性 。
关键词 :离散 变 结构 ;自适 应 滑模控制 ;卡 尔曼滤波 器
中图分类号 :TP273 文献标识码 :A 文章编号 :1671—6-54X(2008)05—0088—04
引言
两轮 自平衡 小车是 一个高 度不 稳定两 轮机 器人 ,
其动力学系统 ,具有非线性 、多变量、强耦合、时变、参
数不确定性 等特性 ,而 且在运 动过程 中要 能够 自主适
应各种 复杂的 环境 ,实现 自主避 障、跟踪、路 径规划 等
功能 ,执行分配 的各项任务 。近年来 ,该系统 已成为研
究各种控制 的一个理想平 台 ,是 检验不 同控 制方法 、策
略控制能力 的典 型装置 。滑模控 制发展 到 20世 纪后
期 ,计算 机实时控制 日益成熟 ,离散变 结构控制发展 起
謦H曩h
囊裴羹I 接收器l f
来 ,关于其研究和设计 已成为变结构控制理论 与应用
的一个重要组 成部分 。本文基于广 义卡尔曼滤 波器及
传统的趋近律变结构控制 ,设计 了滤波器 自适应滑模
控制器 ,将其应用于两轮小车的平衡控制上,并给出了
对比仿真研究 。
1 小车的硬件结构及 系统动力学模型
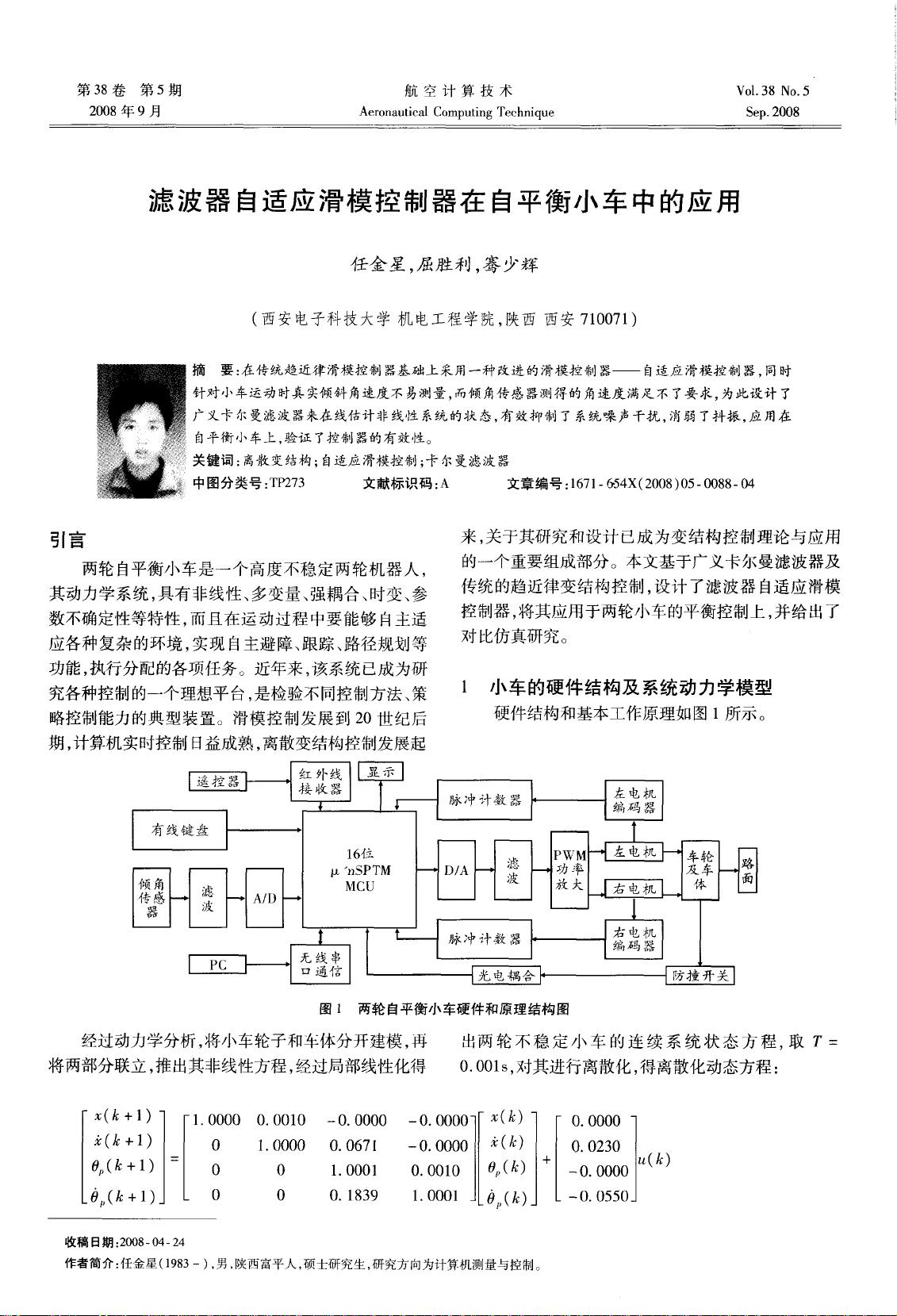
硬件结构和 基本工作原理 如图 1所示 。
脉冲计数器卜 豪毫警
nSPTM
H D/A H蓑 H H茗 MCU I l l l…
亟二卜 l 釜善 脉冲计教器
光 电 耦 合
一 IY_ 功率I J及车H 放大1.圈 .1体I l l—T一
—
瘸 l
图 1 两轮 自平衡小车硬件和原理结构 图
经过动力学分析,将小车轮子和车体分开建模,冉
将两部分联立,推出其非线性方程 ,经过局部线性化得
(k+1)
(k+1)
Op(k+1)
1.0000
0
0
0
0.0010
1.0000
0
0
—
0.0000
0.067l
1.0001
0.1839
防撞 开 关
出两 轮 不稳 定 小 车 的连 续 系 统 状 态 方 程,取 T=
0.001 S,对其进行离散化 ,得离散化动态方程 :
一
0.0000
—
0.0000
0.0010
1.0001
(k)
(k)
0 ( )
●
0 ( )
收稿 日期 :2008—04—24
作者简 介:任金星(1983一),男 ,陕西富平人,硕士研究生 ,研究方 向为计筲机测量与控制 。
+
0.0000
0.0230
—
0.0000
—
0.0550
M(k)
曩 一线 一有
下载后可阅读完整内容,剩余3页未读,立即下载
2019-03-22 上传
2022-07-14 上传
2020-07-05 上传
2021-05-28 上传
2022-07-14 上传
2021-01-14 上传

erroryhy1
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
