2015年更新:立体视觉算法与应用详解:新增3D应用与FPGA处理
需积分: 10 147 浏览量
更新于2024-07-21
收藏 51.45MB PDF 举报
Stefano Mattoccia的《立体视觉:算法与应用》讲义是一份详细介绍立体匹配原理和技术的权威资料,尤其针对2015年更新版本,它不仅保留了对基础理论的精准阐述,还新增了关键内容。更新后的讲义涵盖了以下几个方面:
1. **新3D应用**:2015年新增的部分着重介绍了立体视觉在三维重建、增强现实(AR)和机器人导航等领域的实际应用,反映了当时最新的技术趋势。
2. **FPGA处理**:详细讲解了如何将立体匹配算法优化到现场可编程门阵列(FPGA)平台,这在硬件加速和实时性能方面具有重要意义,对于硬件工程师和嵌入式系统开发者来说是一个宝贵的学习资源。
3. **实验结果**:报告包含了2011年的实验成果,如"线性立体匹配"算法(ICCV 2011)、Metal's算法和"快速分割驱动(FSD)"算法,以及结构从运动(SFM)算法的描述。这些实验展示了不同方法在实际场景中的性能。
4. **GPU加速**:在2011年5月,FBS(Fast Bilateral Stereo)算法的GPU实现被添加进来,这表明随着图形处理器技术的发展,立体匹配算法的并行计算能力得到了提升。
5. **软件实现**:Linux和Windows平台上的Fast Bilateral Stereo算法实现可以在指定网站上下载,便于用户进行实验和研究。
6. **文献集成**:直到2010年4月,讲义还包含了多篇学术论文的描述和实验结果,这些论文进一步扩展了立体视觉的理论基础和实践应用。
7. **课程大纲**:讲义的结构清晰,包括了立体视觉的介绍、算法概述以及可能涉及的具体技术细节,适合教学和研究参考。
通过Stefano Mattoccia的这份讲义,读者可以全面掌握立体视觉的核心概念,了解其在不同领域的最新进展,并掌握如何在实践中运用这些算法,特别是那些涉及硬件加速的实现。这对于从事计算机视觉、机器人学、自动驾驶等领域的专业人士来说,是一份不可多得的参考资料。
Stefano Mattoccia
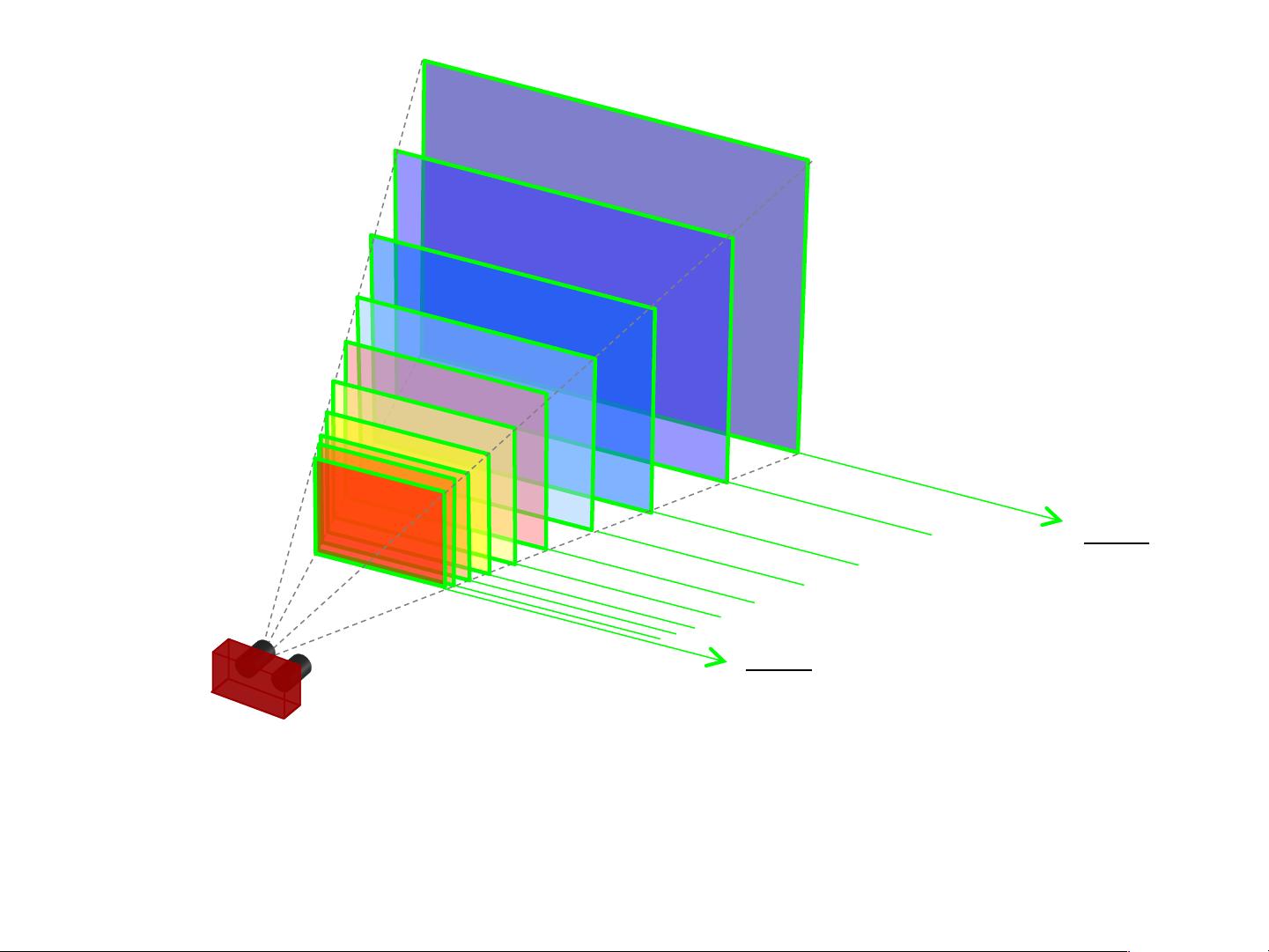
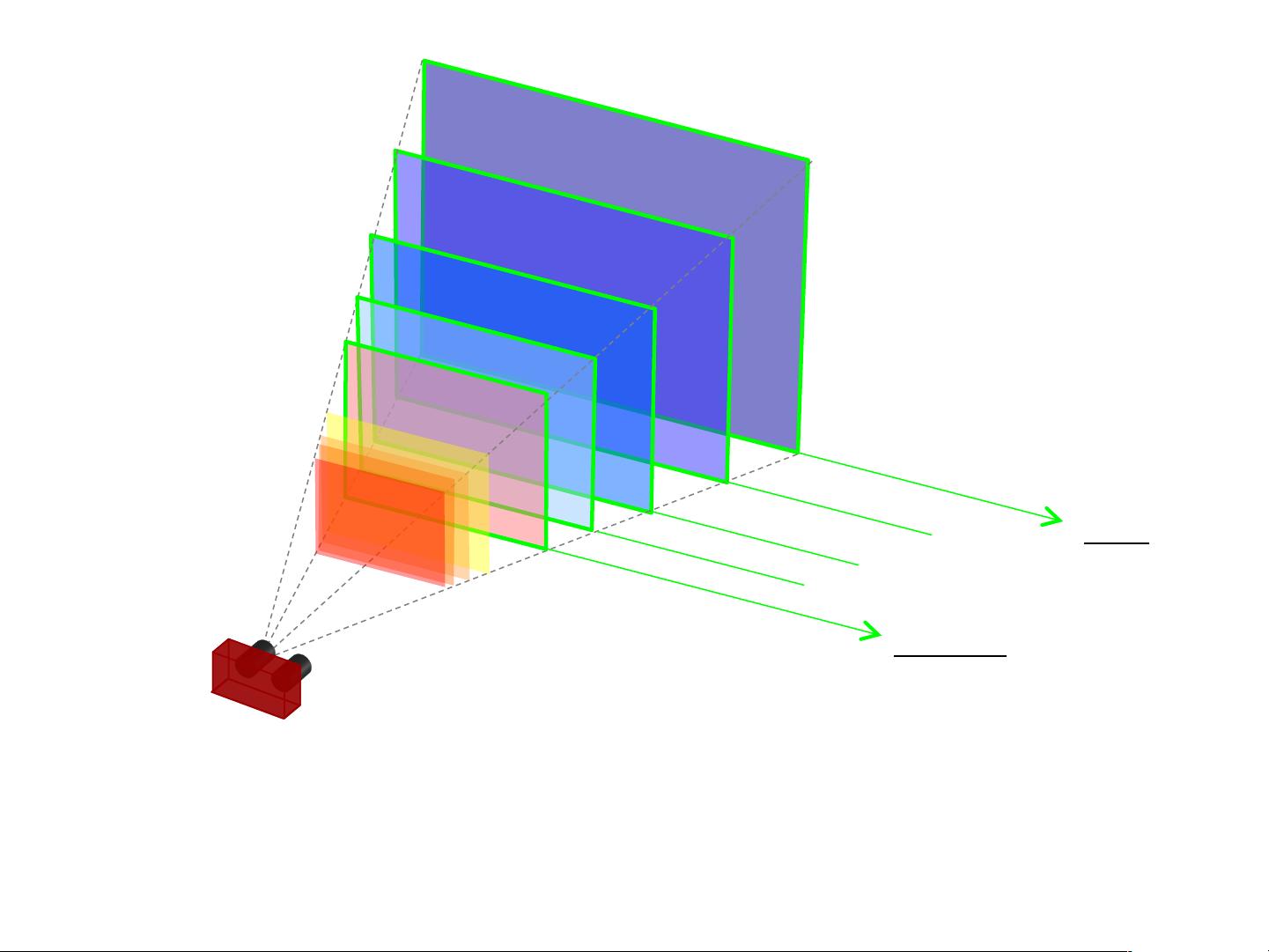
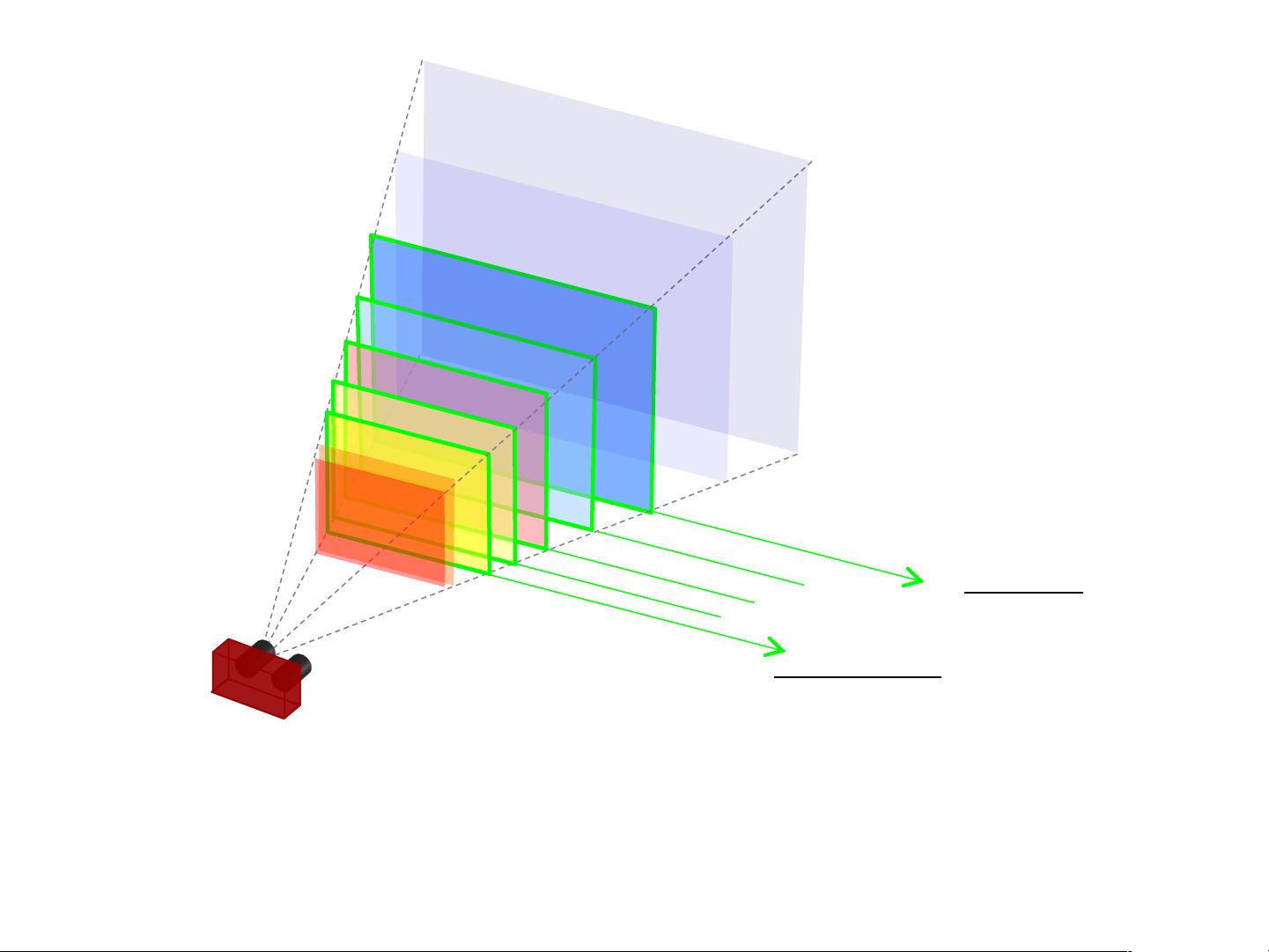
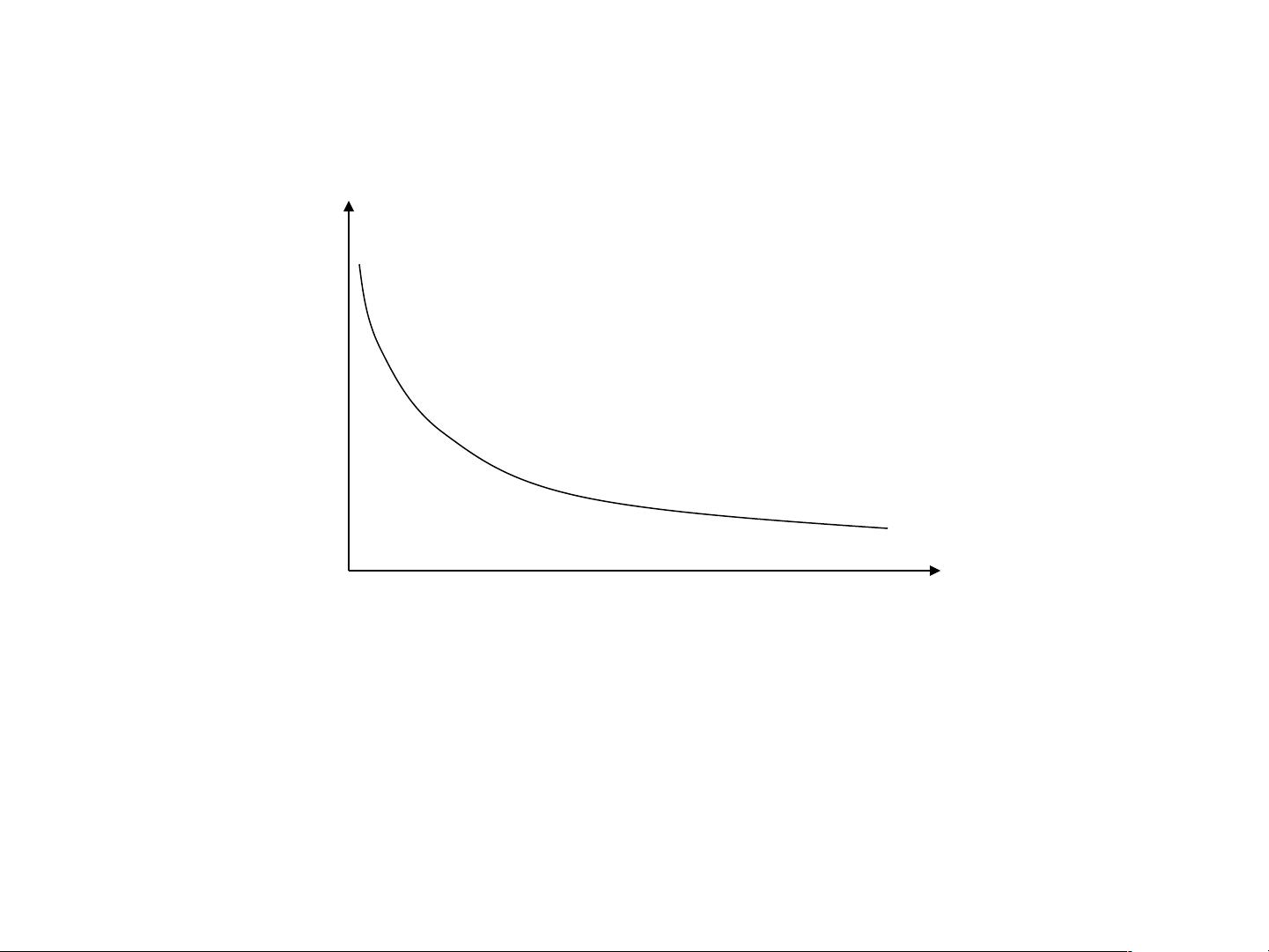
• Depth measured by a stereo vision system is discretized
into parallel planes (one for each disparity value)
• A better (virtual) discretization can be achieved with
subpixel techniques (see Disparity Refinements)
min
d
fb ⋅
max
d
fb ⋅

剩余207页未读,继续阅读
2021-09-29 上传
2021-09-30 上传
2021-10-04 上传
2021-08-11 上传
点击了解资源详情
2022-07-15 上传
2021-08-11 上传
2022-07-15 上传
2022-07-14 上传

Jade-LG
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
