
!"#
:
$%&’(() * +& #,,-&$%%).%/(%&)%%0&%’&%$’
仿生长鳍波动推进系统研制的分析
!
王 硕
!
董 翔
(中国科学院自动化研究所复杂系统与智能科学重点实验室 北京
$%%$0%
)
摘 要 综述了模仿鳐科和裸背鳗科鱼类的高机动性的波动运动方式设计仿生长鳍波动
推进(
1"-2.3#- 4-!4156#-2 78"741,#"-
)系统的研究,包括长鳍波动推进系统的推进机理、长鳍
波动运动的运动学和动力学研究,以及仿生长鳍波动推进实验系统的研制。在此基础上,
指出了今后研究的重点———鳐科和裸背鳗科鱼类游动的运动学、动力学分析;长鳍波动推
进系统的机构设计与控制方法;长鳍波动推进系统的协调控制与导航方法。
关键词 游动机器,自主水下航行器,长鳍波动推进,仿生机器鱼
%
引 言
通过模拟自然界中生物系统的结构、功能来改
进工程技术系统的设计,一直是国内、国际科学研究
的一个重点。鱼类作为水中进化生物的佼佼者具有
优异的水动力学外形,高超的水中运动技巧,卓越的
机动能力,极高的运动效率,惊人的加速能力,持久
的高速巡航能力,极强的适应能力,研究这些特点,
可为设计新型船舶、运输工具、水下潜器找到多种不
同的新思路,如减阻、低噪声驱动及其控制等。针对
鱼类高效运动方式开展理论分析和实验研究,对于
未来新型水下航行器的设计具有重要的理论意义和
实用价值。本文对仿生长鳍波动推进(
1"-2.3#- 4-!4.
156#-2 78"741,#"-
)系统的研究进行了综述。
$
鱼类的运动方式
由于不同的鱼类生活在不同的环境中,并具有
不同的与环境相适应的运动能力,所以面对不同的
应用需求可以选取不同类型的鱼类进行模仿。对鱼
类的模仿有很多不同的方面,这里主要讨论对鱼类
的身体推进部分的结构、游动运动方式的模仿。一
般来说,鱼类的运动方式有身体
*
尾鳍(
9"!: 5-! * "8
;54!51 3#-
,
<=>
)推 进 方 式 和 奇 鳍
*
对 鳍(
?@!#5- *
75#8@! 3#-
,
AB>
)推进方式
[
$
,
)
]
。目前研究较多的是
<=>
波动推进方式,这种游动方式的巡航速度快、效
率高,能够以小于一个身长的转弯半径进行转弯,对
于高效、快速的运输工具和水下潜器的设计具有极
好的借鉴意义
[
’
,
/
]
。在此类研究基础上开发出了许
多不 同 类 型 的 基 于
<=>
运 动 方 式 的 仿 生 机 器
鱼
[
C
,
D
]
。这种运动方式在静水环境、高速游动状态
下是一种最优的运动方式,也是绝大部分鱼类所采
用的运动方式。但在低速运动状态和要求高机动性
的情况下以及在紊流环境复杂时,其效率却相当
低
[
(
,
E
]
。因此,在上述环境下工作的运载工具和潜
器不适合采用
<=>
运动方式。而生活在类似环境
下的自然界的鱼类,例如“尼罗河魔鬼”鱼、鳐鱼等,
一般多采用如图
$
所示的奇鳍
*
对鳍波动推进方式,
因此研究这类鱼类的推进方式对于设计复杂紊流环
境下低速、高机动性运动的新型运载工具和潜器具
有重要的理论和应用价值。由于
AB>
运动方式的
鱼类用于推进的部分是由多根鳍条和连接薄膜组成
的鱼鳍,本文将模仿这种鱼鳍而设计的推进系统称
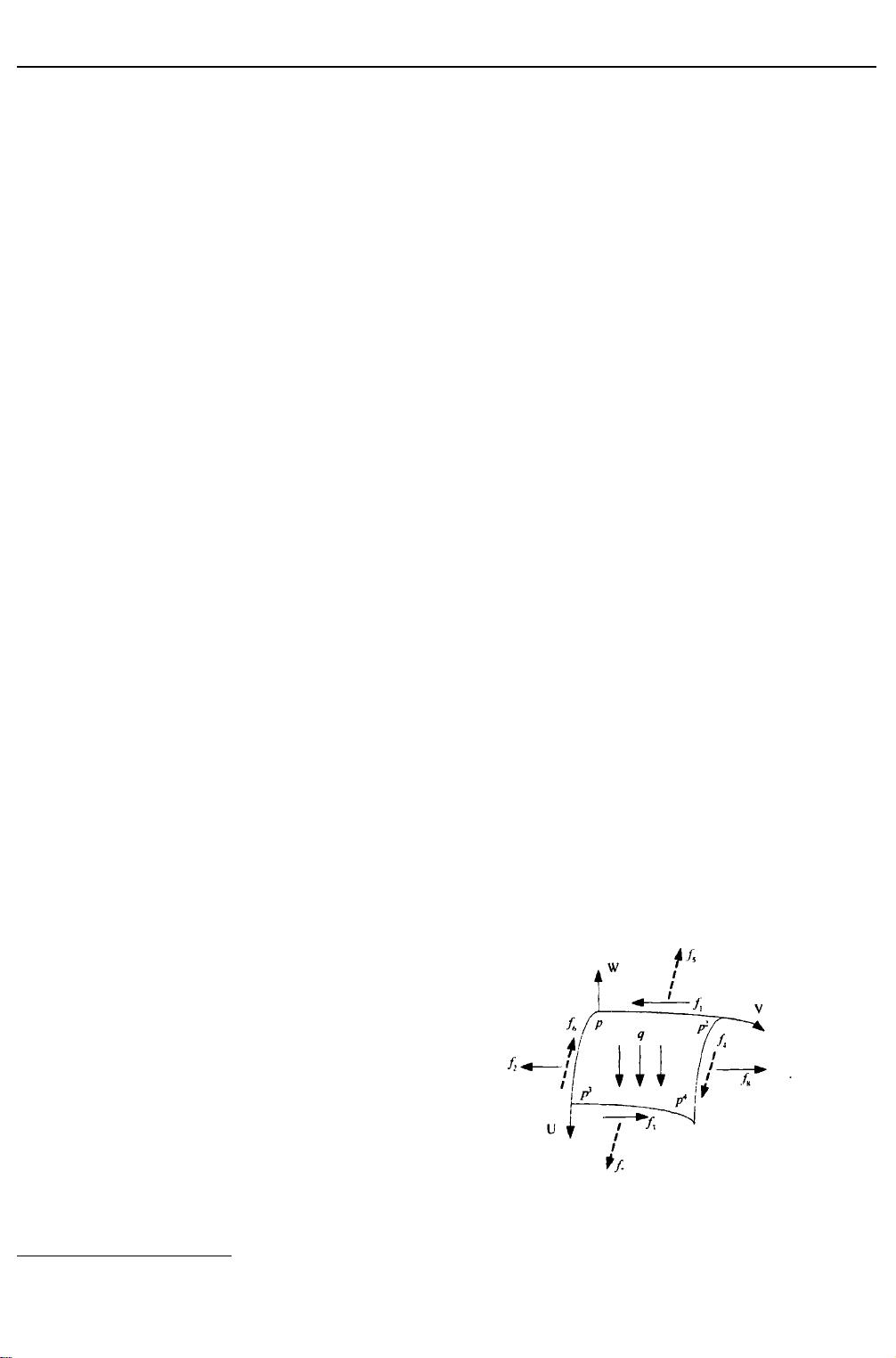
图
!
薄膜微元单元上的受力
[
"
]
—
/E)
—
高技术通讯
)%%0
年 第
$0
卷 第
’
期:
)E/ F )E0
"
!
男,
$0(’
年生,副研究员;研究方向:仿生机器人,多机器人;联系人,
G.?5#1
:
,H4"& I5-2J #5& 5;& ;-
(收稿日期:
)%%(.$).)0
)
ED’
计划(
)%%DKK$$L))C
)和国家自然科学基金(
D%D%C%)D
,
D%D’C%$%
,
D%()C’%0
)资助项目。
下载后可阅读完整内容,剩余5页未读,立即下载

weixin_38614462
- 粉丝: 4
- 资源: 965
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


