基于HCS12单片机的智能车:路径识别与控制系统设计
版权申诉
本篇论文详细介绍了作者在中国电子设计竞赛中基于Freescale公司的16位HCS12单片机设计并实现的一种智能小车系统。系统的核心目标是让小车能在白色背景下,通过路径识别和闭环控制技术,沿任意黑色引导线稳定行驶。论文的创新点在于采用了低功耗CMOS摄像头进行路径识别,通过视频信号二值化处理,微处理器进一步分析图像以做出决策。
路径识别模块是整个系统的关键部分,它利用摄像头获取实时视频信息,将其转化为128×64像素的黑白图像,以便于单片机处理。这种技术确保了系统对复杂环境的敏感度和识别精度,对于智能车的自主导航至关重要。
舵机控制采用非线性P算法,这是一种高效的控制策略,能够快速响应并提供精确的转向角度调整。另一方面,车速控制则采用了PID(比例-积分-微分)算法,这是一套经典的控制系统设计方法,它结合了速度反馈,实现了系统的闭环控制,提高了系统的稳定性和动态性能。
硬件设计方面,文章详细描述了包括HCS12单片机主控电路、图像同步分离电路、二值化电路、电源管理电路、电机驱动板、波形整形电路和测速电路在内的各个组件。这些电路构成了一个协同工作的整体,确保了智能小车的顺畅运行。
总结来说,这篇论文不仅展示了智能车系统的设计思路和技术选择,还提供了实际应用中的关键硬件实现和控制算法,为参赛者和研究者提供了有价值的参考,特别是在路径识别和低功耗设计方面的实践案例。此外,由于是在中国电子设计竞赛这样的平台上发表,它还反映了当前大学生在智能车辆领域的创新能力和技术水平。
传感器世界 2008.2
www.sensorworld.com.cn
34
摘要:基于 Freescale 公司的 16 位 HCS12 单片机设计一种智能车系统。在该系统中,由 CMOS 摄像头
实现路径识别,通过对小车的闭环控制,使小车能按照任意给定的黑色引导线平稳地寻迹。实验证明:系
统能很好地满足智能车对路径识别性能和抗干扰能力的要求,舵机调节响应时间快,稳态误差小,具有较
好的动态性能和良好的鲁棒性。
关键词:智能车;HCS12 单片机;视频图像;PWM 控制信号
中图分类号:TP242.6
+
2 文献标识码:A 文章编号:1006-883X(2008)02-0034-04
一、引言
智能汽车是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,集中的运用到自动控制、
模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要
的军用及民用价值。通常,智能车系统要求小车在白色背
景的场地上,通过对转向角和车速的控制,使小车能自动
地沿着一条任意给定的黑色带状引导线行驶。
本文基于低功耗 CMOS 摄像头设计了一种智能车,并
完成了给定的任务要求。
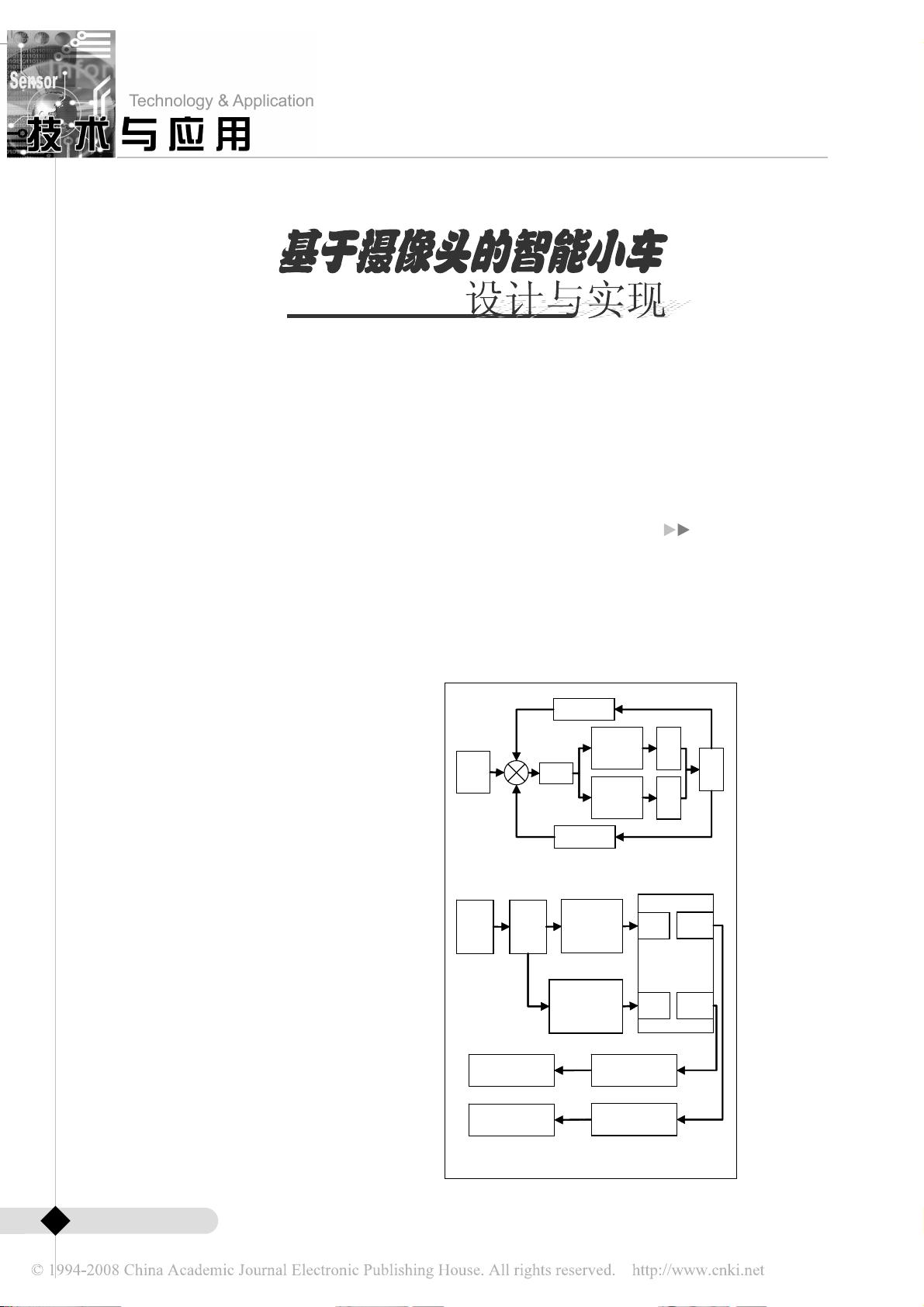
二、系统总体方案
该系统主要由 HCS12 控制核心、电源管理模块、电机
驱动模块、路径识别模块、转向舵机控制模块和速度检测
模块组成,其结构框图如图
1 所示。
路径识别功能由面阵 CMOS 摄像头实现,将视频信号
二值化为
128×64pix 的图像后送入微处理器进行处理。舵机
控制采用非线性
P 算法进行调节,而车速控制采用的是 PID
算法。软件设计中实时采集路况信息和实时速度,实现整
个系统的闭环控制。
三、系统硬件设计
系统的硬件主要包括:HCS12 单片机主控电路、图像同
步信号分离电路、二值化电路、电源管理电路、电机驱动
板、波形整形电路、测速电路几部分,其系统结构如图
2 所
示。
刘进 齐晓慧 李永科
小
车
舵
机
电
机
路径
识别
实时位置
MCU
转向控制
信号输出
速度控制
信号输出
速度反馈
图 1 控制系统实现框图
视频
信号
缓冲
放大
同步分离
及整形
HCS12
二值化及
波形整形
ECT
ECT
PWM
PWM
舵机控制电路
电机控制电路
转向舵机
直流电机
图
2
硬件构成框图
下载后可阅读完整内容,剩余3页未读,立即下载
2023-12-18 上传
2021-09-21 上传
153 浏览量
113 浏览量
255 浏览量
132 浏览量
2021-09-05 上传
198 浏览量
2021-09-21 上传

阿拉伯梳子
- 粉丝: 2698
- 资源: 5734
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言写图片源码,易语言缩略图源码,易语言超级列表框显示缩略图
- orca-endeavours
- befchina.github.io
- hidden:超轻便的MacOS实用程序,可帮助隐藏菜单栏图标
- assignment-2015-1:2015 年课程的第一个作业
- 算法_halfway9ya_MPDA算法_PDA_Kalmanfilter_pda算法
- Hello-World:协调性测试解决方案
- 光栅化器:OBJ文件光栅化器
- mod_rpaf-0.6.tar.gz
- 包括微博等评论以及对应的情感,分为积极和消极两种,适用于情感分析训练
- 易语言超级列表框时钟刷新
- NanoVNA:非常微小的掌上型矢量网络分析仪
- 系统-SISWalletAdmin
- 从0开始学习微服务架构
- Toastmasters - Pathways Keyboard Navigation-crx插件
- finance-node
