安川伺服代码解析sigma-7: 电流环、反馈电流计算、相位计算和补偿
需积分: 46 198 浏览量
更新于2024-01-21
2
收藏 2.2MB PDF 举报
安川伺服代码解析:sigma-7
安川7代码解析目录
一、电流环
1.1 反馈电流计算
1.2 相位计算及补偿
1.2.1 电角度的计算
安川伺服是一种先进的控制系统,能够实现精确的运动控制和位置控制。其中,sigma-7作为安川伺服系列的一员,具有更高的性能和更丰富的功能。为了更好地理解和应用sigma-7伺服,我们将对其代码进行详细解析。
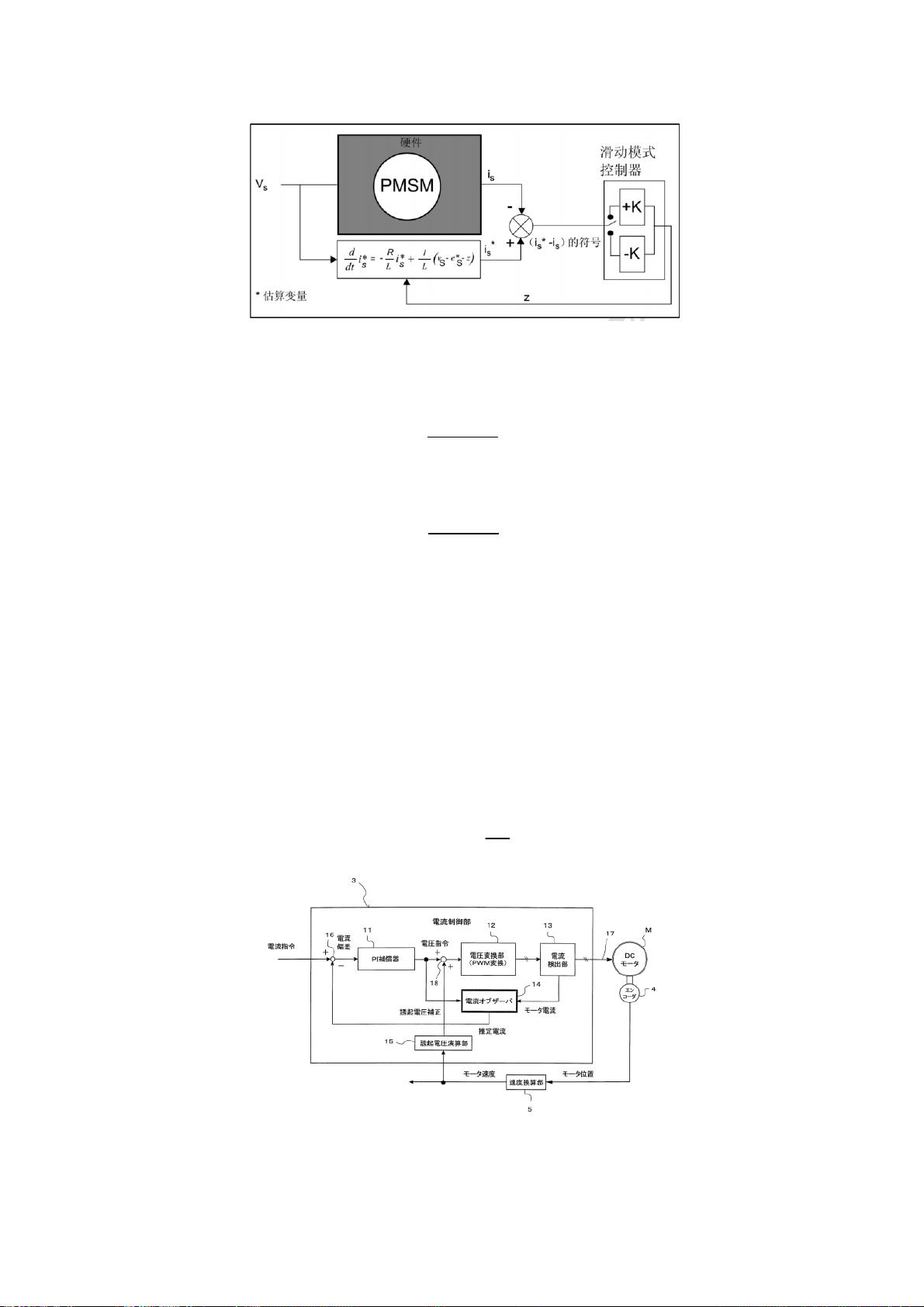
在伺服系统中,电流环是至关重要的一个环节。电流环的目标是通过调整伺服电机的电流,来实现所需位置和速度的控制。安川伺服的电流环采用了一种高效的反馈电流计算方法。通过对电机电流进行采样和计算,能够准确地反映出电机当前的工作情况。
在反馈电流计算中,需要考虑到一些因素对电流的影响,例如电机的阻抗和电缆的衰减等。通过对这些因素进行补偿计算,可以准确地得到电机的实际工作电流。这样,在控制系统中对电流进行调整时,就能更好地控制电机的运动状态。
除了反馈电流计算,相位计算也是电流环的重要部分。相位计算是通过计算电机电流与控制信号之间的相位差,来确定电机的工作状态。在安川伺服中,采用了一种高精度的相位计算方法,通过对电机的传感器信号和控制器信号进行比较,可以准确地计算出相位差。
在相位计算过程中,还需要考虑到电角度的计算。电角度是指电机转子当前角度与初始角度之间的差值。通过对电机转子位置进行监测和记录,可以计算出电角度的变化。这样,在控制系统中对电机进行相位补偿时,就能更准确地调整电机的工作状态。
对于安川伺服代码解析,以上只是其中的一小部分内容。实际上,安川伺服的代码非常复杂,涉及到多个环节和算法。只有深入研究和理解这些代码,才能更好地应用和优化安川伺服系统的性能。
总结起来,通过对安川伺服代码的解析可以了解到电流环的重要性,以及反馈电流计算、相位计算及补偿等关键部分。这些代码的优化和调整,对于安川伺服系统的精确运动控制至关重要。只有透彻理解这些代码,才能发挥安川伺服系统的最大潜力,实现更高的性能和更精确的控制。

16
NO_LMT_CHK );
#define OBSSEL 0x0008 /* bit.3 : Current Observer Select bit ; <V038> <V076> */
if( AxisRsc->IntAdV.IqInData >= 0 )
{ /* 0以上のとき */
/* TMP3 = IntAdV.IqInData */
AxisRsc->IntAdwk.swk2 = AxisRsc->IntAdV.IqInData;
}
else /* 負のとき */
{
AxisRsc->IntAdwk.swk2 = ~AxisRsc->IntAdV.IqInData; /* TMP3 = ~IntAdV.IqInData;
*///110530tanaka21作業メモ、-1掛けるのとどっちが速い? 取反 相当于取绝对值操作
AxisRsc->IntAdwk.swk2 = AxisRsc->IntAdwk.swk2 + 1; /* TMP3 = TMP3 + 1 */
}
if( AxisRsc->IntAdwk.swk2 <= 14250 )
{
AxisRsc->IntAdwk.swk3 = 0; /* TMP4 = 0 ( OverFlowCheck = OK ) */
}
else
{
AxisRsc->IntAdwk.swk3 = 1; /* TMP4 = 1 ( OverFlowCheck = NG ) */
}
判别 q 轴电流是否饱和,置标志位。若饱和,再后续程序中不累加观测电流。
/* 2012.10.26 Y.Oka ★電流オブザーバ現状未対応⇒パラメータ一括書き込み対応要★ */
/*********************************************************************************/
/* */
/* 電流オブザーバパラメータ計算 */
/* */
/******************************************************************************/
/* */
/* オブザーバゲイン1 : Ts
/L */
/* scantime
[ns] 1 Bprm.Vdc[Vop]/2 15000 */
/*wk_TSPL = ---------- * ------------ * --------------- * ------------- * 2^7 */
/* 10^9 Bprm.MotR[Ω] 2^13 Bprm.MaxCur[Aop
] */
/* */
/* オブザーバゲイン2 : 1 - R* Ts
/ L - exp( -2*pi*Kpi ) */
/* Bprm.MotR[Ω] scantime
[ns] */
/* wk_GOBS = 2^8 - --------------- * -------------- * 2^8 */
/* Bprm.MotLq[H] 10^9 */
/* */
/* scantime
[ns] */
/* - 2^8 * exp
( -2*pi * Kpi[Hz] * -------------- ) */
/* 10^9 */



剩余111页未读,继续阅读
217 浏览量
812 浏览量
141 浏览量
217 浏览量
1109 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

faith_hu
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
