Canny边缘检测算法详解:从灰度化到高斯模糊与边界提取
18 浏览量
更新于2024-08-29
收藏 192KB PDF 举报
Canny边缘检测算法是一种广泛应用于图像处理中的边缘检测方法,尤其适用于建筑图像中的线性特征提取。该算法通过以下几个步骤来确保精确且高效地识别图像中的边缘:
1. **图像灰度化**:
Canny算法首先将彩色图像(如RGB或更高维度的高光谱图像)转换为灰度图像,这是因为边缘信息主要集中在单通道中。灰度化的目的是减少冗余数据,简化后续处理,并降低计算复杂度。常用的灰度计算公式有两种:一是平均值法,即Gray(i,j) = (R(i,j) + G(i,j) + B(i,j)) / 3;二是基于人眼对色彩敏感性的加权平均,如Gray(i,j) = 0.299 * R(i,j) + 0.587 * G(i,j) + 0.114 * B(i,j)。
2. **高斯模糊**:
在灰度化后,高斯模糊用于平滑图像并去除噪声。高斯模糊利用高斯函数的特性,移除高频(如噪声)部分,保留边缘这些高频信息。选择合适的高斯核(如5x5大小,σ=1.4)至关重要,过大可能导致弱边缘丢失,而过小则不能有效去噪。生成高斯滤波器通常涉及离散化高斯函数。
3. **图像梯度计算**:
Canny算法接着计算图像的梯度,这包括梯度幅值(衡量像素变化的强度)和梯度方向(边缘的方向)。这是通过计算每个像素点的微分(符号计算)来完成的,这有助于定位边缘位置。
4. **非极大值抑制(NMS)**:
在得到梯度后,非极大值抑制技术会保留每个像素点处梯度幅值的最大值,同时消除其附近的小峰点,从而减少伪边缘干扰。
5. **双阈值边缘检测**:
最后,Canny算法采用双阈值策略来确定哪些边缘是真正的边缘。首先,筛选出强边缘(大于较高的阈值),然后对于那些介于两个阈值之间的边缘,如果它们连接到强边缘,就保留下来,否则丢弃。这一步确保了结果的稳定性和可靠性。
Canny算法在处理建筑物线性特征时,特别关注边缘的清晰度和稳定性,确保在复杂背景下能够准确地提取出结构特征。在实际应用中,可能会针对建筑场景的特点调整算法参数,例如滤波器大小和阈值设置,以优化边缘检测效果。
Canny 边缘检测算法边缘检测算法_建筑物线性特征建筑物线性特征
Canny 检测算法包含下面几个阶段:检测算法包含下面几个阶段:
1.图像灰度化
2.高斯模糊处理
3.图像梯度、梯度幅值、梯度方向计算
4.NMS(非极大值抑制)
5.双阈值的边界选取
1、图像灰度化图像灰度化
当仅提取一张图片的边界,单通道的图片已经足够提供检测出边界的信息。所以我们可以将R、G、B的3通道图片乃至更
高维的高光谱遥感图像进行灰度化,这是一种降维操作,它减少了冗余数据从而降低了计算开销。以下是对RGB图片灰度化
的方法:
def gray( img_path):
"""
计算公式:
Gray(i,j) = [R(i,j) + G(i,j) + B(i,j)] / 3
or :
Gray(i,j) = 0.299 * R(i,j) + 0.587 * G(i,j) + 0.114 * B(i,j)
"""
# 读取图片,cv2.imread()接口读图像,读进来直接是BGR 格式数据格式在 0~255,
# 通道格式为(W,H,C)
img_bgr = cv2.imread(img_path)
# BGR 转换成 RGB 格式
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
# 灰度化
img_gray = np.dot(img_rgb[...,:3], [0.299, 0.587, 0.114])
return img_gray
2、高斯模糊处理高斯模糊处理
高斯模糊实际上是对灰度化后的图像去噪去噪。因为噪声也集中于高频信号,很容易被识别为伪边缘。应用高斯模糊去除噪
声,降低伪边缘的识别。但是由于图像边缘信息也是高频信号,高斯模糊的半径选择很重要高斯模糊的半径选择很重要,过大的半径很容易让一些弱边缘
检测不到。进行高斯滤波之前,需要先得到一个高斯滤波器(kernel)。如何得到一个高斯滤波器呢?其实就是将高斯函数离
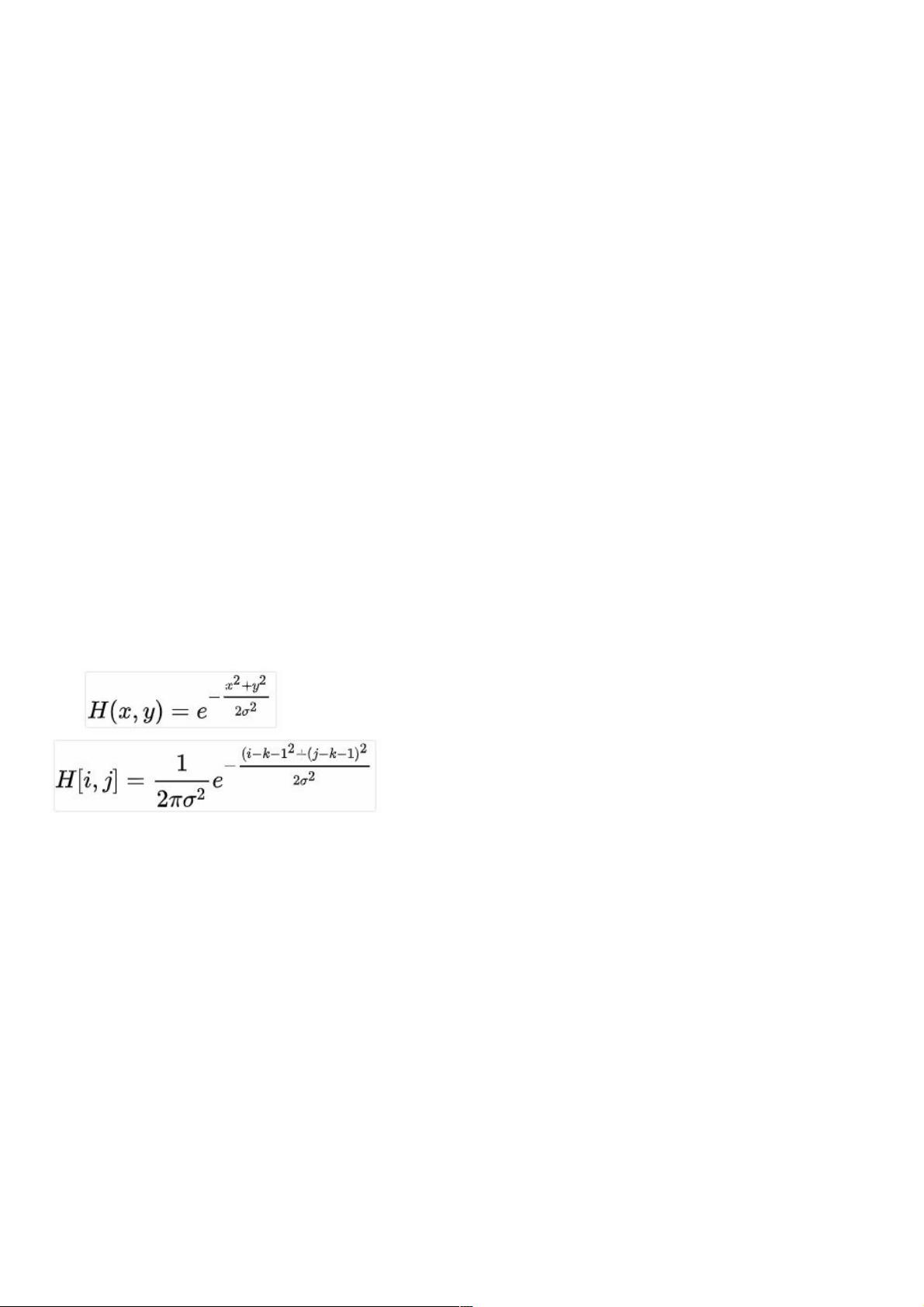
散化,将滤波器中对应的横纵坐标索引代入高斯函数,即可得到对应的值。不同尺寸的滤波器,得到的值也不同,下面是二维
高斯函数与 (2k+1)x(2k+1) 滤波器的计算公式 :
高斯滤波常用尺寸为 5×5,σ=1.4 的高斯滤波器。下面是 5×5 高斯滤波器的实现代码。
# 去除噪音 - 使用 5x5 的高斯滤波器
def smooth( img_gray):
# 生成高斯滤波器
"""
要生成一个 (2k+1)x(2k+1) 的高斯滤波器,滤波器的各个元素计算公式如下:
H[i, j] = (1/(2*pi*sigma**2))*exp(-1/2*sigma**2((i-k-1)**2 + (j-k-1)**2))
"""
sigma1 = sigma2 = 1.4
gau_sum = 0
gaussian = np.zeros([5, 5])
for i in range(5):
for j in range(5):
gaussian[i, j] = math.exp((-1/(2*sigma1*sigma2))*(np.square(i-3)
+ np.square(j-3)))/(2*math.pi*sigma1*sigma2)
gau_sum = gau_sum + gaussian[i, j] # 归一化处理
gaussian = gaussian / gau_sum
# 高斯滤波
W, H = img_gray.shape
new_gray = np.zeros([W-5, H-5])
#进行卷积
for i in range(W-5):
for j in range(H-5):
下载后可阅读完整内容,剩余7页未读,立即下载
715 浏览量
371 浏览量
128 浏览量
205 浏览量
2022-05-29 上传
300 浏览量
2012-10-13 上传
219 浏览量

weixin_38689551
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 财务管理软件毕业设计及源码分享
- 实现Android上拉加载更多功能的简易指南
- React应用入门与脚本使用:构建与测试指南
- 探索CHT1007-2001元数据标准:地理信息数字化核心
- grunt-patternprimer入门:模式目录的生成与使用
- Python中beeprint的使用方法及优势
- 深度解读FFmpeg封装升级及其在Java中的应用
- SCSS技术在thombehrens.github.io项目的应用
- iOS开发者必备:2020年最新面试题解析大全
- C#实现POS打印机小票打印的详细指南
- 自定义键盘技术实现与应用解析
- 使用Python开发的KubeSQL工具实现Kubernetes资源SQL查询
- Java编程实现动态情话表白界面教程
- Spring与Redis集成的初级教程演示
- PB纯源码实现二维码秒识别技术揭秘
- 实现超轻量级JavaScript事件发射器micro-events
