小目标人脸检测:深度层次特征与细粒度识别
小目标人脸检测:探索挑战与解决策略
在计算机视觉领域,小目标检测一直是一个具有挑战性的课题。这篇发表于2018年CVPR(计算机视觉与模式识别)会议的论文《FindingTinyFaces》由Peiyun Hu和Deva Ramanan两位作者提出,他们针对小目标人脸检测提出了创新的方法,尤其是在处理尺寸变化、图像分辨率以及上下文理解这三个关键方面。
首先,论文强调了尺度不变性在小目标检测中的重要性。传统上,许多对象识别方法追求的是对物体大小的鲁棒性,但人脸识别的挑战在于,识别3像素高度的小脸和300像素高度的大脸所依赖的特征是截然不同的。为了应对这一问题,研究者们没有采用传统的单一尺度检测器,而是开发了一种新型策略——训练不同尺度的专用检测器。这种方法旨在提高检测效率,通过让单个深度特征层次的不同层共享特征,实现多任务学习。
其次,图像分辨率对小目标的清晰度至关重要。高分辨率的图像能够提供更多的细节,有助于更准确地定位和识别小人脸。论文可能探讨了如何在保持高清的同时,优化网络架构以适应不同尺度的目标,比如通过调整卷积核大小、步幅或池化策略。
最后,上下文推理是另一个关键要素。在复杂的图像环境中,理解人脸与其他元素之间的关系有助于区分真正的人脸和背景干扰。论文可能探讨了如何利用周围环境的信息,如人脸与周围物体的位置、姿势和语义关联,来增强小目标人脸的检测性能。
论文的核心贡献可能包括一个专门设计的算法或网络架构,它能够在大规模数据集上训练出高效且准确的小目标人脸检测模型,同时在面对复杂场景和多种尺度变化时展现出良好的稳健性和准确性。此外,为了验证其效果,作者可能还展示了实验结果,对比了他们的方法与传统方法在小目标人脸检测任务上的性能,并通过信心度评估来衡量错误检测的可能性。
这篇论文不仅解决了小目标人脸检测的理论问题,而且提供了实用的技术解决方案,为该领域的研究者和工程师提供了有价值的研究方向和实践经验。通过深入研究和应用这些概念,计算机视觉技术在诸如安防监控、社交媒体分析等场景中的小目标识别能力将得到显著提升。
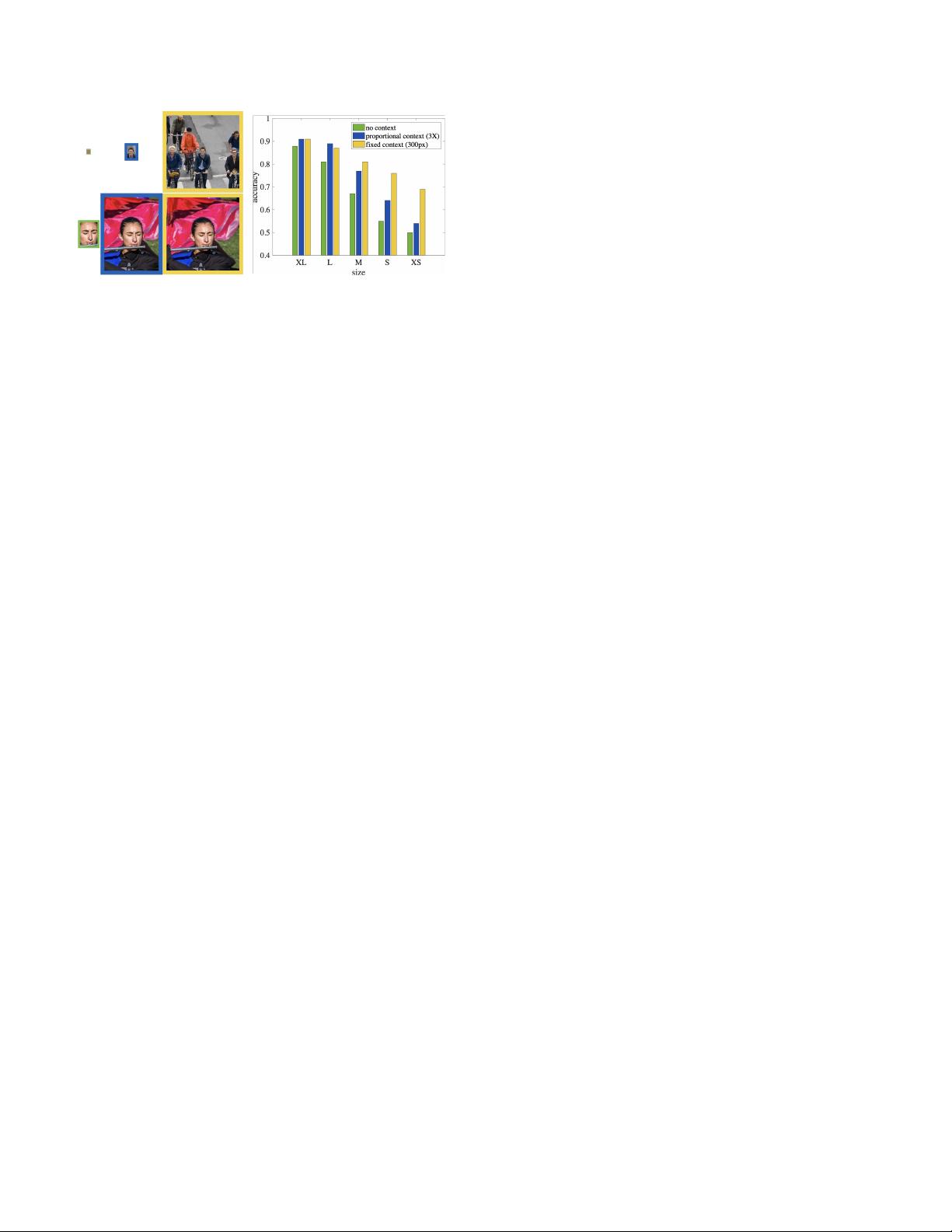
Figure 3: On the left, we visualize a large and small face,
both with and without context. One does not need context
to recognize the large face, while the small face is dramat-
ically unrecognizable without its context. We quantify this
observation with a simple human experiment on the right,
where users classify true and false positive faces of our pro-
posed detector. Adding proportional context (by enlarging
the window by 3X) provides a small improvement on large
faces but is insufficient for small faces. Adding a fixed con-
textual window of 300 pixels dramatically reduces error on
small faces by 20%. This suggests that context should be
modeled in a scale-variant manner. We operationalize this
observation with foveal templates of massively-large recep-
tive fields (around 300x300, the size of the yellow boxes).
2. Related work
Scale-invariance: The vast majority of recognition
pipelines focus on scale-invariant representations, dating
back to SIFT[15]. Current approaches to detection such as
Faster RCNN [18] subscribe to this philosophy as well, ex-
tracting scale-invariant features through ROI pooling or an
image pyramid [19]. We provide an in-depth exploration
of scale-variant templates, which have been previously pro-
posed for pedestrian detection[17], sometimes in the con-
text of improved speed [3]. SSD [13] is a recent technique
based on deep features that makes use of scale-variant tem-
plates. Our work differs in our exploration of context for
tiny object detection.
Context: Context is key to finding small instances as
shown in multiple recognition tasks. In object detection, [2]
stacks spatial RNNs (IRNN[11]) model context outside the
region of interest and shows improvements on small object
detection. In pedestrian detection, [17] uses ground plane
estimation as contextual features and improves detection on
small instances. In face detection, [28] simultaneously pool
ROI features around faces and bodies for scoring detections,
which significantly improve overall performance. Our pro-
posed work makes use of large local context (as opposed to
a global contextual descriptor [2, 17]) in a scale-variant way
(as opposed to [28]). We show that context is mostly useful
for finding low-resolution faces.
Multi-scale representation: Multi-scale representation
has been proven useful for many recognition tasks. [8, 14,
1] show that deep multi-scale descriptors (known as “hy-
percolumns”) are useful for semantic segmentation. [2, 13]
demonstrate improvements for such models on object detec-
tion. [28] pools multi-scale ROI features. Our model uses
“hypercolumn” features, pointing out that fine-scale fea-
tures are most useful for localizing small objects (Sec. 3.1
and Fig. 5).
RPN: Our model superficially resembles a region-
proposal network (RPN) trained for a specific object class
instead of a general “objectness” proposal generator [18].
The important differences are that we use foveal descrip-
tors (implemented through multi-scale features), we select
a range of object sizes and aspects through cross-validation,
and our models make use of an image pyramid to find ex-
treme scales. In particular, our approach for finding small
objects make use of scale-specific detectors tuned for inter-
polated images. Without these modifications, performance
on small-faces dramatically drops by more than 10% (Ta-
ble 1).
3. Exploring context and resolution
In this section, we present an exploratory analysis of the
issues at play that will inform our final model. To frame
the discussion, we ask the following simple question: what
is the best way to find small faces of a fixed-size (25x20)?.
By explicitly factoring out scale-variation in terms of the
desired output, we can explore the role of context and the
canonical template size. Intuitively, context will be crucial
for finding small faces. Canonical template size may seem
like a strange dimension to explore - given that we want to
find faces of size 25x20, why define a template of any size
other than 25x20? Our analysis gives a surprising answer
of when and why this should be done. To better understand
the implications of our analysis, along the way we also ask
the analogous question for a large object size: what is the
best way to find large faces of a fixed-size (250x200)?.
Setup: We explore different strategies for building
scanning-window detectors for fixed-size (e.g., 25x20)
faces. We treat fixed-size object detection as a binary
heatmap prediction problem, where the predicted heatmap
at a pixel position (x, y) specifies the confidence of a fixed-
size detection centered at (x, y). We train heatmap predic-
tors using a fully convolutional network (FCN) [14] defined
over a state-of-the-art architecture ResNet [9]. We explore
multi-scale features extracted from the last layer of each
res-block, i.e. (res2cx, res3dx, res4fx, res5cx) in terms of
ResNet-50. We will henceforth refer to these as (res2, res3,
res4, res5) features. We discuss the remaining particulars of
our training pipeline in Section 5.
剩余11页未读,继续阅读
873 浏览量
206 浏览量
2024-01-10 上传
2022-06-28 上传
201 浏览量
293 浏览量
2024-07-12 上传

xiangpijiao
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
