"基于STM32的四足机器人控制系统设计与仿真"
版权申诉
58 浏览量
更新于2024-03-17
1
收藏 2.68MB DOC 举报
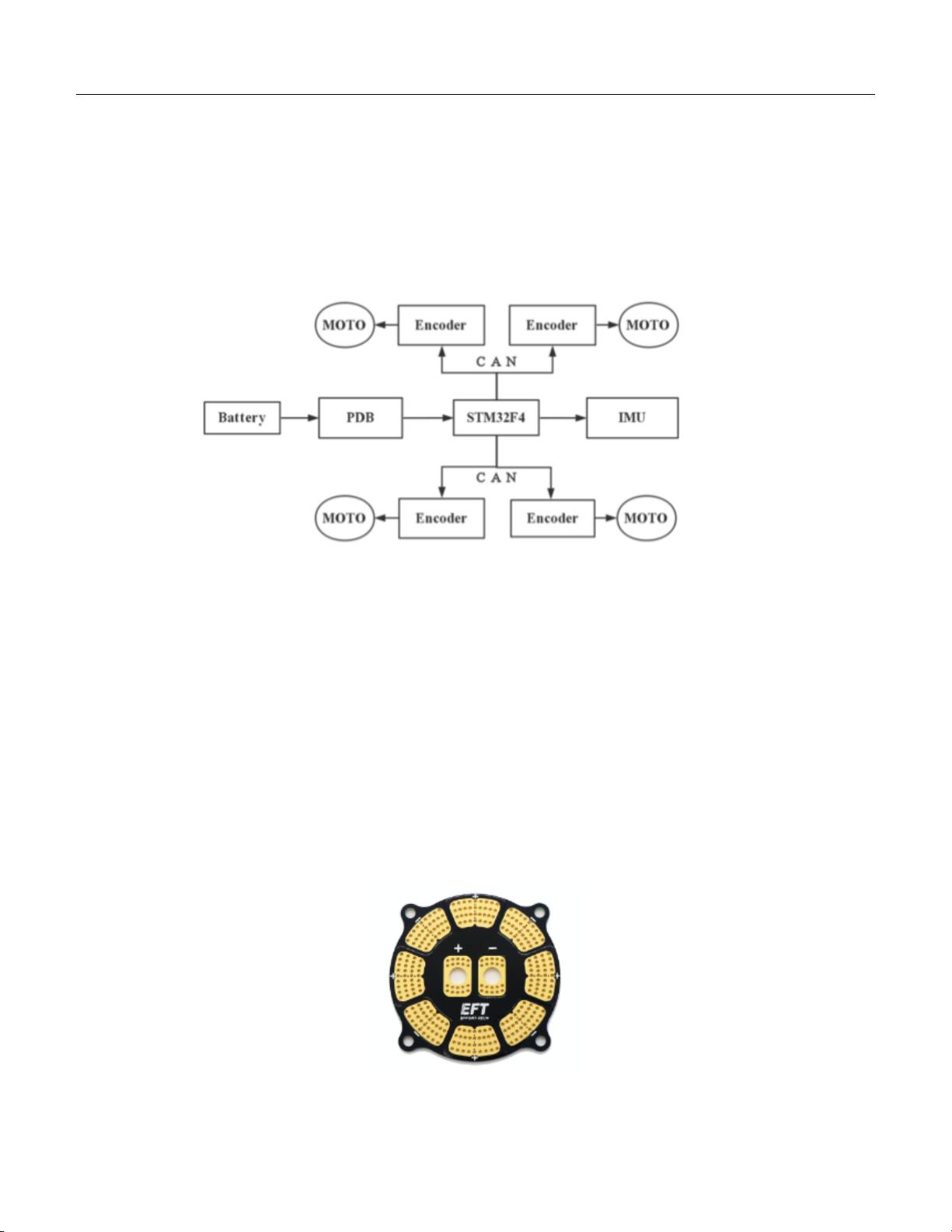
The document "Design and Simulation of the Control System of Quadruped Robot" focuses on the design and programming of a control system for a quadruped robot using the STM32 microcontroller. The main goal is to control the movements of the robot by converting coded instructions into electrical signals through the STM32 microcontroller. These signals are then used to control the motors connected to the distribution board on the quadruped robot, allowing the motors on the mechanical legs to function according to predetermined working time intervals and drive the connecting rods on the legs to rotate properly. The motors on the connecting rods are driven by electronic speed controllers to rotate at specified angles, enabling the mechanical legs to walk along the desired trajectory. In addition to the STM32 microcontroller, the system also includes a gyroscope, which provides feedback to the microcontroller about the current positional deviation of the quadruped robot relative to the horizontal position based on its internal three-axis orientation. This feedback is used by the control system to adjust the corresponding motors to correct the deviation. Key words: legged robot, STM32 microcontroller, electronic speed controller, gyroscope.
北京理工大学珠海学院 2020 届本科生毕业设计
7
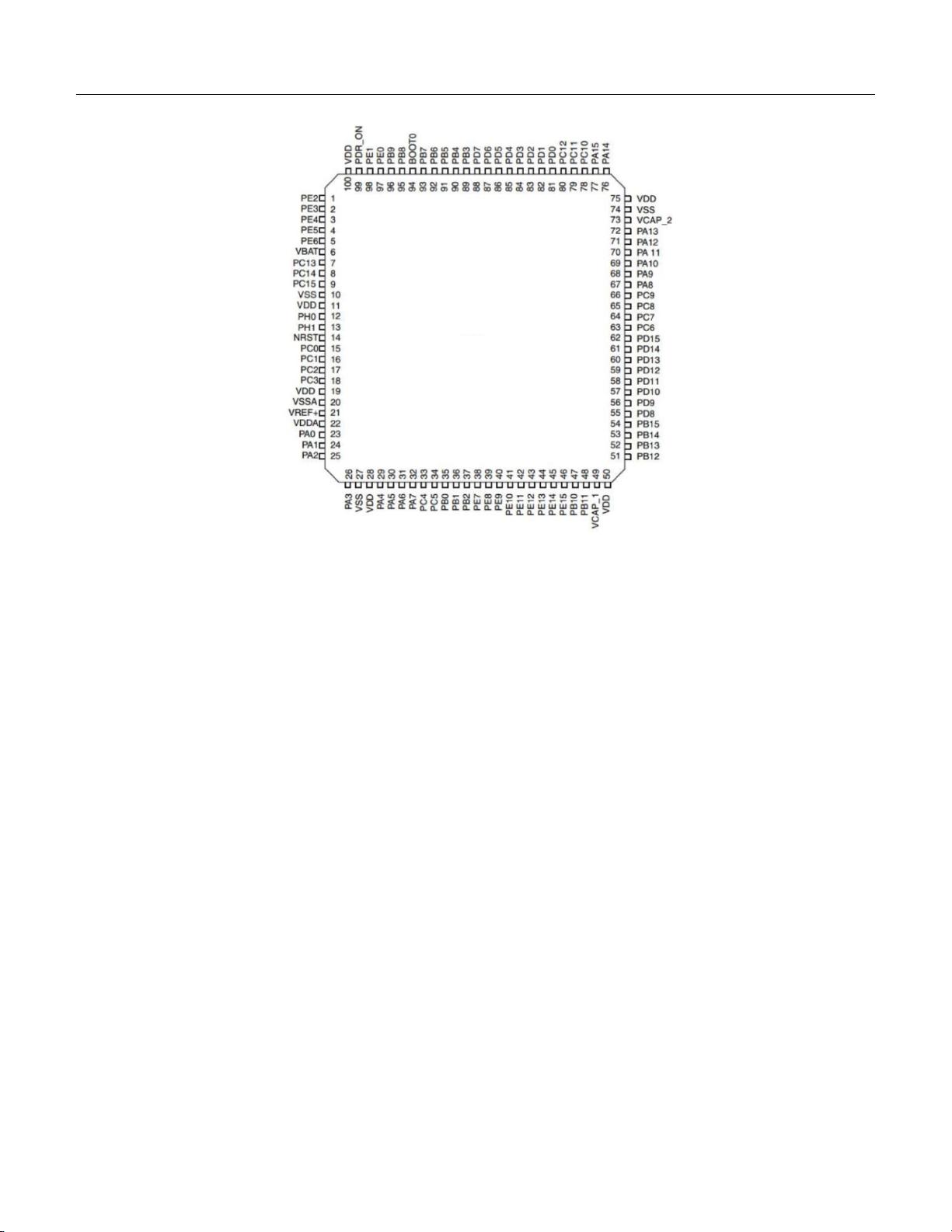
图 4-1 STM32F407 引脚图
3.2 Keil 简介
Keil 软件是目前广泛运用于单片机系列的软件。Keil 提供了包括 C 编译器、宏汇编、链接器、
库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境将这些部分组
合在一起。Keil C51 生成的目标代码效率非常之高,多数语句生成的汇编代码很紧凑,容易理解。
在开发大型软件时更能体现高级语言的优势。与汇编相比,Keil 可使用的 C 语言是较为简单易懂
的,也是计算机语音入门的基础,因此该软件也易于上手。
Keil 使用流程如下:
第一步:在菜单栏中点击“project”选择 New uVision Project”新建一个工程,在弹出对话
框中,工程文件选择要放置的文件夹。弹出一个框,选择在 CPU 类型如 STM32F407 系列芯片。选择
好后会弹出一个窗口提示是否添加启动代码。这样新工程的创建完毕。
第二步:点击工具栏,选择 File---new,新建一个空白文档。在空白处写入程序。单击左上
方的 Save,保存好源程序,并把文档后缀定为“.C”。如果是汇编语言,后缀为“.ASM”。把刚创
建的源程序文件加入到工程项目文件中,右击右方“Source group”,单点“ADD”按钮时,选择刚
保存的源程序文件,单击“Close”。
第三步:单击 Project,选择“options for Target (自定义)”,在“xtal(MHZ)”中设置
要设置的晶振参数。

剩余61页未读,继续阅读
点击了解资源详情
点击了解资源详情
787 浏览量
2023-09-09 上传
2023-07-13 上传
243 浏览量
2023-09-08 上传
145 浏览量
2023-07-11 上传

南抖北快东卫
- 粉丝: 85
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
