无人机辅助的自动驾驶系统:运动物体追踪与路况检测
需积分: 10 48 浏览量
更新于2024-07-16
收藏 41.32MB PPTX 举报
"该资源是一个关于毕业设计的PPT,主要探讨了基于无人机平台的运动物体追踪与路况检测,特别是针对自动驾驶技术中的关键问题进行了深入分析。内容涵盖了目标检测算法的发展历程,包括YOLO和R-CNN家族算法,并介绍了实时车辆识别、行驶路径预测、车辆行为逻辑、红绿灯处置等关键技术在自动驾驶系统中的应用。"
在这个毕业设计项目中,作者黄柱邦主要关注的是如何利用无人机、汽车和中央服务器构建一个高效的自动驾驶系统。系统的核心在于提高汽车的反应速度,降低算法的性能需求。在目标检测方面,项目涉及了多个经典的深度学习算法,如YOLOv2、Faster R-CNN和Mask R-CNN,这些算法在实时车辆识别中起到了关键作用。
YOLO(You Only Look Once)是Joseph Redmon提出的实时目标检测算法,它开创了一阶段检测的先河。YOLOv2在YOLO的基础上改进了定位精度并优化了整体性能。随后,何凯明等人提出了一系列改进,如Fast R-CNN和Faster R-CNN,后者首次实现了所有组件的并行训练,进一步提升了效率。Mask R-CNN在此基础上增加了实例分割的功能,使得检测结果更加精细。
系统的关键技术之一是实时车辆识别,通过Faster R-CNN和YOLO这两种不同的目标检测算法实现。Faster R-CNN是一种两阶段的检测方法,先生成候选区域,再进行分类和精确定位;而YOLO则是一种一阶段的方法,直接预测边界框和类别概率,适合实时场景。
车辆行驶路径预测技术是另一个重要组成部分,通过改进YOLOv3算法来实现。这有助于飞行器跟踪汽车并做出行驶决策。车辆行为逻辑是自动驾驶的核心,它决定了汽车如何根据环境信息做出适应性的动作。
红绿灯处置技术是确保自动驾驶安全的关键,包括红绿灯的识别和应对策略。该项目中,利用了仿真环境(如Unreal Engine)来模拟真实世界情况,解决实际测试中的计算性能和硬件限制问题,同时能对行人、车辆、无人机等多种元素进行模拟,以提高系统的泛化能力和安全性。
这个毕业设计项目深入探讨了自动驾驶技术的关键技术和挑战,展示了如何结合无人机和深度学习算法来提升自动驾驶系统的效能和可靠性。
基于自动飞行器平台的
运动物体追踪与路况检测
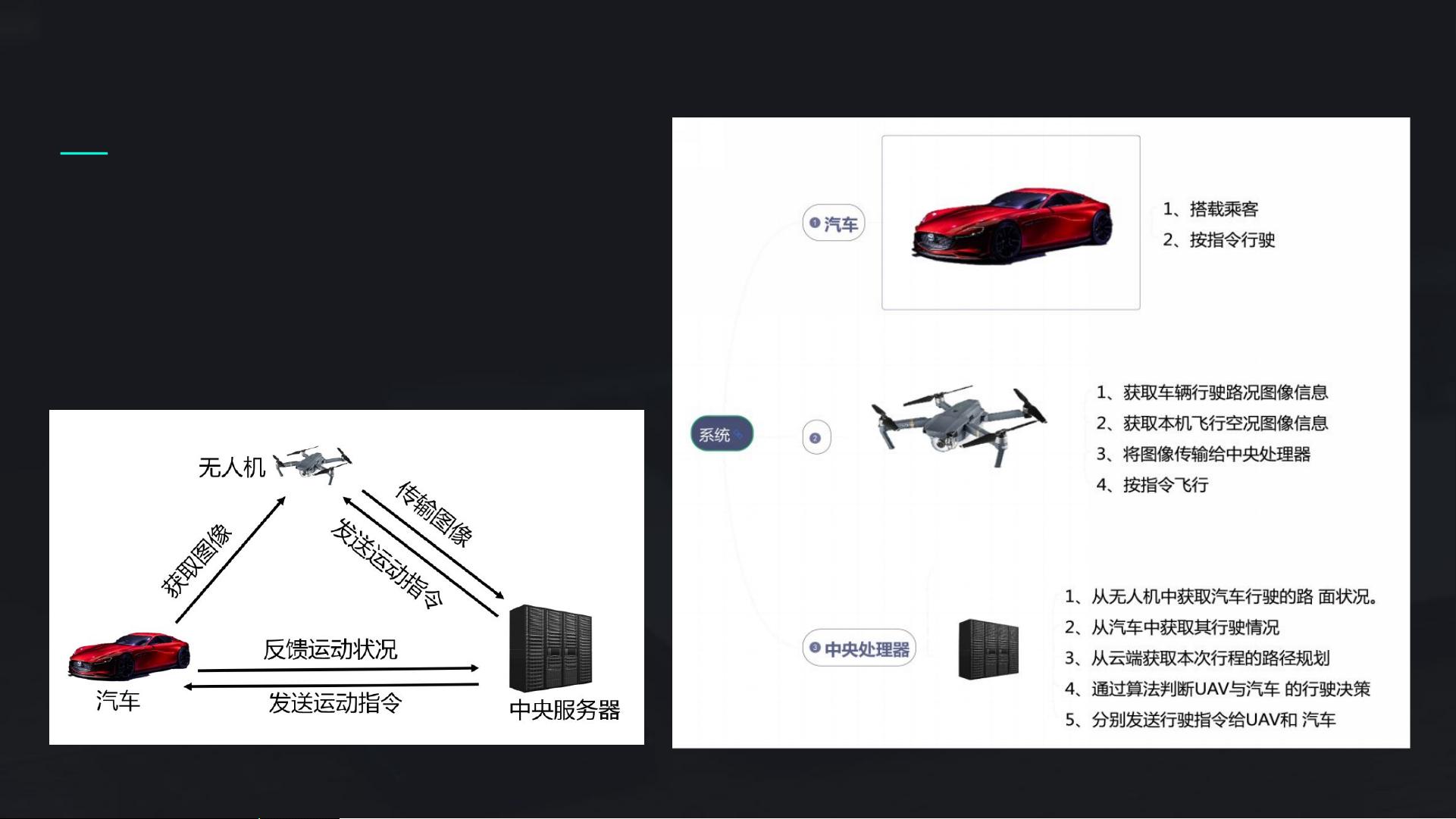
如图所示,该系统致力于使用无人机、汽车、中央
服务器组成核心系统,完成自动驾驶任务。该系统
能够极大地增加汽车的反应时间,有效地降低自动
驾驶技术对各种算法的速度性能要求。
剩余21页未读,继续阅读
133 浏览量
2024-10-28 上传
2024-10-26 上传
2024-10-27 上传
2024-10-27 上传
2024-10-28 上传
2024-10-26 上传

码农邦
- 粉丝: 234
 我的内容管理
展开
我的内容管理
展开







最新资源
- Premiere Pro CS6视频编辑项目教程微课版教案
- SSM+Lucene+Redis搜索引擎缓存实例解析
- 全栈打字稿应用:演示项目实践与探索
- 仿Windows风格的AJAX无限级树形菜单实现教程
- 乐华2025L驱动板通用升级解决方案
- Java通过jcraft实现SFTP文件上传下载教程
- TTT素材-制造1资源包介绍与记录
- 深入C语言编程技巧与实践指南
- Oracle数据自动导出并转换为Excel工具使用教程
- Ubuntu下Deepin-Wine容器的使用与管理
- C语言网络聊天室功能详解:禁言、踢人与群聊
- AndriodSituationClick事件:详解按钮点击响应机制
- 探索Android-NetworkCue库:高效的网络监听解决方案
- 电子通信毕业设计:简易电感线圈制作方法
- 兼容性数据库Compat DB 4.2.52-5.1版本发布
- Android平台部署GNU Linux的新方案:dogeland体验
