深度学习框架:多输出神经网络解决干细胞追踪难题
192 浏览量
更新于2024-08-26
收藏 2.77MB PDF 举报
"使用具有多输出的深度神经网络进行干细胞运动跟踪"
本文提出了一种创新的深度学习框架,专门用于解决干细胞运动跟踪中的挑战。干细胞跟踪是生物学研究中的关键任务,因为它有助于理解细胞行为,如迁移、有丝分裂和细胞死亡等。然而,由于干细胞在显微镜图像中频繁的运动、变形以及低分辨率,这项任务变得尤为困难。传统的细胞追踪方法在处理这些复杂情况时往往力不从心,特别是在实时跟踪中。
作者提出的解决方案是构建一个深度神经网络,它结合了卷积结构和多输出层。卷积神经网络(CNN)利用转移学习策略,从大量视觉数据中学习深层特征,以识别和学习干细胞的鲁棒特征。这有助于模型更好地理解细胞的形状和运动模式,即使在变化复杂的环境中也能保持追踪的准确性。
多输出层的设计是该框架的一大亮点。除了主要的细胞追踪任务,模型还可以同时执行有丝分裂检测作为辅助任务。这种并行处理方式增强了模型的泛化能力,使得网络不仅能够跟踪细胞的位置,还能预测其可能的行为,如是否正在进行分裂。这样的设计对于实时监测和分析干细胞动态至关重要。
此外,该框架还包括一个基于粒子滤波器的运动模型,以改进细胞轨迹预测;采用特定的细胞采样策略,优化了追踪过程;并且有一套相应的模型更新策略,确保模型能随着新数据的输入而持续改进。在实际应用中,与传统方法相比,该框架在人体干细胞显微图像数据集上的表现证明了其在跟踪性能和鲁棒性上的提升。
为了验证有丝分裂检测的准确性,研究人员还对跟踪的细胞进行了手动标记的有丝分裂事件。实验结果显示,提出的框架在干细胞追踪及其相关问题的解决上表现出色,为未来的研究提供了强大的工具,有望推动干细胞研究领域的发展。
这篇论文展示了深度学习技术如何在生物医学图像分析中发挥重要作用,特别是在解决干细胞追踪这类复杂问题时。通过结合卷积结构、多输出层和智能运动模型,这个深度学习框架为自动化和精确的细胞行为分析开辟了新的可能性。
2 Method
In this section, the framework and method proposed for cell
tracking and mitosis detection are introduced.
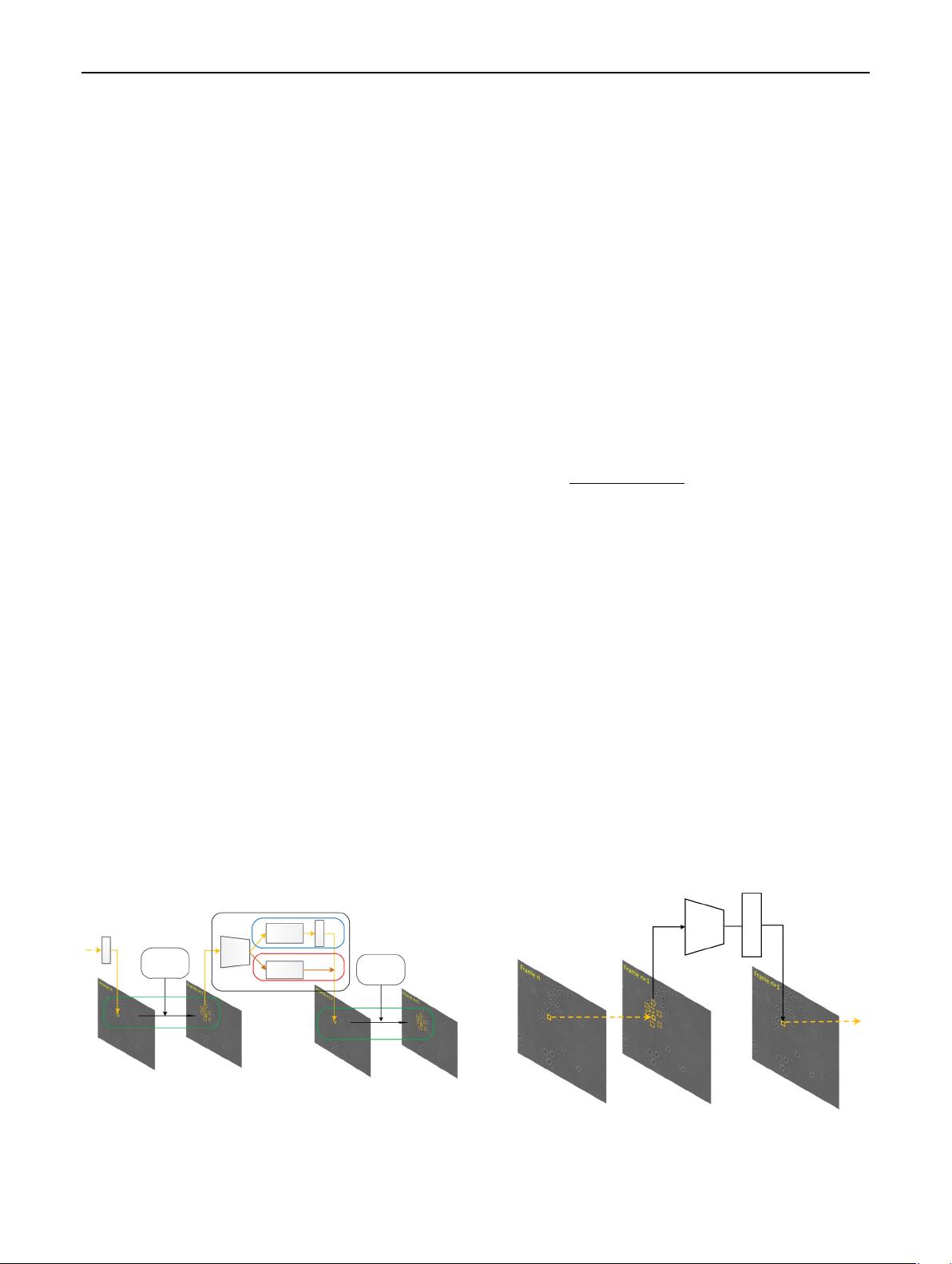
Framework Our deep learning-based framework is shown
in Fig. 1. It consists of two main parts: a sampling pro-
cess (gre en) and the TDNNs. The TDNNs are com posed of
a tracking part (blue), detection part (red), and convolu-
tional layers. The target stem cell is only marked out using
a bounding box at the start frame, and then the system
tracks the cell and detects its mitosis automatically. This
bounding box covering the target cell is denoted as
z ¼fx; y; h; lg. Where fx; yg denotes the center coordinate
of the box, and fh; lg denotes the height and width of the
box. Subsequently, each incoming frame of the cell image
sequence is processed as follows:
1. First, z is obtained from the previous frame (contains
image and position information of the target cell) , and
a particle filter-based random sampling algorithm is
applied to the current frame to generate n candidate
position set Z ¼ z
1
; z
2
; ...; z
n
;
2. The cell tracking part of the network confirms the
target cell region z
0
from candidate positions set Z in
the current frame. Set z ¼ z
0
;
3. The mitosis detection part of the networks detects
whether the target cell is splitting; and
4. Process the next frame and return to step 1.
After step 2, the target cell is chosen from candidat es in
the current frame, while step 3 establishes whether the
target cell is undergoing mitosis. The framework repeats
this process frame by frame to track the cell and detect its
mitosis simultaneously. Additional details are as follows:
2.1 Initialization
In the initialization phase, the original position of the target
cell z
init
, which is denoted with a bounding box, is initial-
ized manually at the beginning frame (shown in Fig. 1).
2.2 Particle filter-based method
The particle filter approach [25], used during the tracking
process for sampling as shown in green in Fig. 1,isa
sequential Bayesian estimation approach that recursively
infers the hidden state of the target. It is the dominant
approach in visual tracking. Mathematically, tracking aims
at solving the problem of verifying the most probable state
of the target at each time step t based on the observation
results of the previous time step t 1[26]:
s
t
¼ arg max ps
t
jy
1:t1
¼ arg max
Z
ps
t
js
t1
ps
t1
jy
1:t1
ds
t1
:
ð1Þ
where s
t
and y
t
denote latent state and observation vari-
ables at time t, respectively. Bayes rule is used to update
the posterior distribution of the state variable here when a
new observation y
t
arrives:
ps
t
jy
1:t
¼
py
t
js
t
ðÞps
t
jy
1:t1
ðÞ
py
t
jy
1:t1
ðÞ
:
ð2Þ
Particle filter approximates the true poster state distribu-
tion ps
t
jy
1:t1
ðÞby a set of n sample s, called part icles ,
fs
t
i
g
n
i¼1
with corresponding importance weights fw
t
i
g
n
i¼1
which sum to 1. Particles are drawn from an im portance
distribution qs
t
js
1:t1
; y
1:t
ðÞ. For cell tracking, the state
variable s represents the position of the cell, which is
denoted as z ¼fx; y; h; lg. Here, a normal distribution is
proposed to model each dimension of qs
t
js
t1
ðÞindepen-
dently. The particle filter is used as a moti on model for
trackers to generate the probable states of the target at
each time step. The tracking result is the particle wi th the
largest probability output determined by different obser-
vation models, which the deep neural network was used
for this work.
For the cell tracking task, as shown in Fig. 2, the particle
filter algorithm is used for sampling the candidate positions
Candicated
posions
Top K
Paral filter
based
sampling
CNNs
Tracking
part
Detecon
part
Top K
TDNNs
Paral filter
based
sampling
Fig. 1 Overview of the proposed framework. Blue: tracking part;
green: particle filter-based sampling process; and red: mitosis
detection part (color figure online)
TDNNs
Top K
Partial filter
…
…
Partial filter
observational model
Fig. 2 Particle filter method in tracking phase
Neural Computing and Applications
123
剩余12页未读,继续阅读
2021-09-25 上传
2023-12-25 上传
2022-11-18 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38531210
- 粉丝: 2
- 资源: 917
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
