序列机器人链中关节2后置位移的计算
需积分: 0 201 浏览量
更新于2024-08-05
收藏 130KB PDF 举报
在"CS223A Introduction to Robotics"这门课程的冬季2007/2008年的第二份家庭作业解答中,讨论的是一个通用的开放型、串联(serial)的机械臂(arm)的运动学问题。这个机械臂由多个关节(kinematic joints)组成,每个关节连接着相邻的两个部件。关节之间的相对位移由一个4x4矩阵T描述,矩阵元素是在基座(base)固定坐标系{A}中计算的。
问题的核心是理解关节间运动的顺序对整体位移矩阵的影响。当关节的位移按照序列1、2、3、4进行时,即从自由端(free end)开始逐个移动,总位移的表示为T1 * T2 * T3 * T4。这里的T1到T4代表了每个关节的独立位移操作。
然而,如果关节的位移顺序反转,从固定端开始(即先执行关节4的位移),然后依次执行关节3、2和1,这时像T2、T3和T4这样的矩阵不再反映实际的位移,因为它们没有按照原定的运动路径。
题目要求根据原始的Ti来计算:
(a) 当关节2的位移发生在关节1之后时,我们需要找到新的关节2位移操作的矩阵T'2。为了计算T'2,关键在于识别出这种顺序变化后,前一个关节(这里指关节1)已经完成了其位移,所以对于关节2,它实际上是在一个已知的初始位置(由T1表示)上进行的位移。因此,T'2可以看作是T1的逆运算与关节2自身的位移矩阵T2的组合,即T'2 = T1^-1 * T2。
总结来说,这个问题考察了串联机械臂中关节位移顺序对整体运动模型的影响,以及如何通过逆运算处理这种变化。理解和应用这种位移矩阵的乘法规则对于机器人运动学的理解至关重要,尤其是在设计和控制机械臂运动时,正确地考虑关节间的运动序列是不可或缺的。
Introduction to Robotics (CS223A) Homework #2 Solution
(Winter 2007/2008)
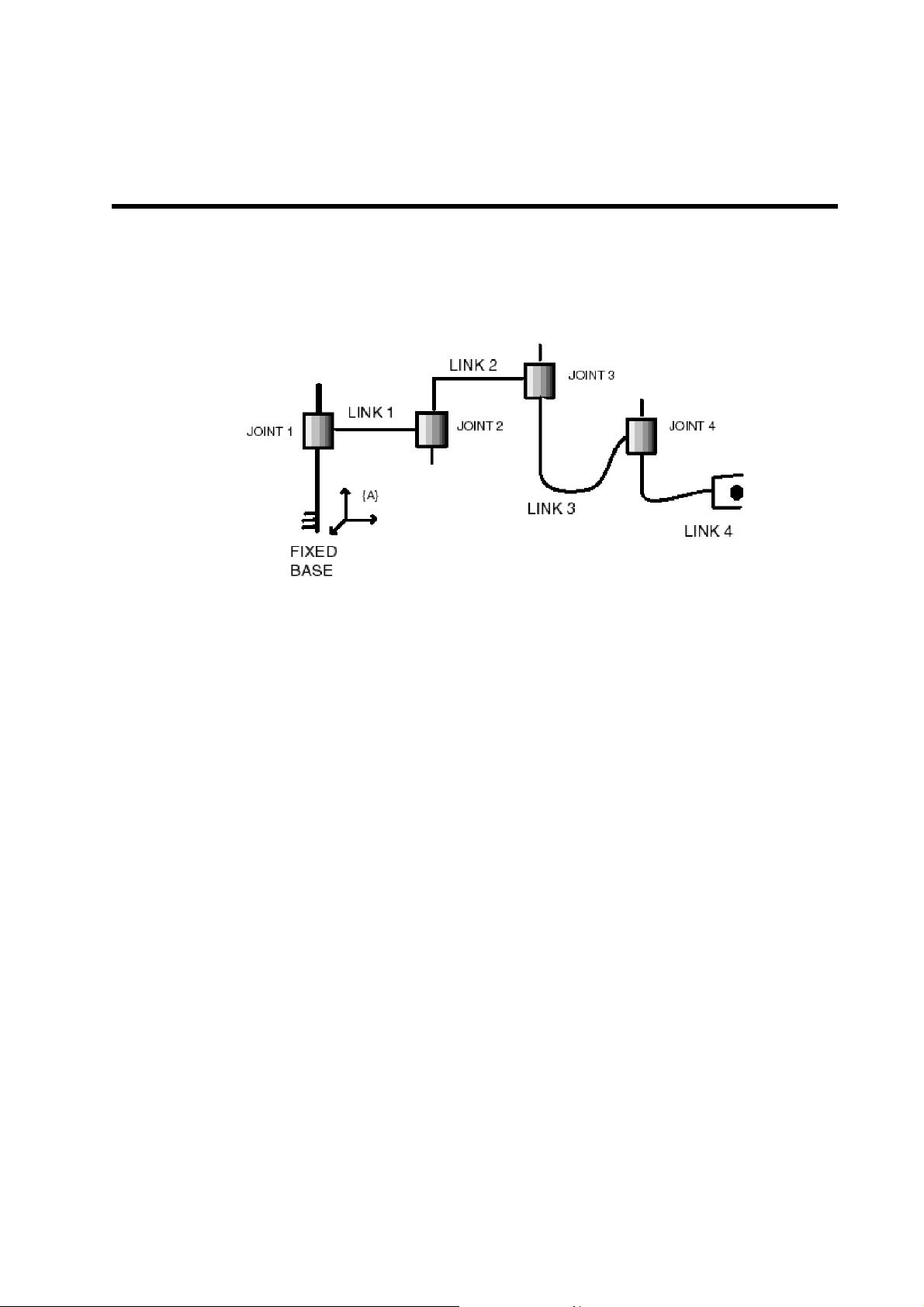
1. The following sketch represents a generic open, serial, kinematic-chain.
Here each kinematic joint connects two adjacent members. Assume that the relative
displacement between adjacent members i − 1 and i is described by an operator T
i
that is
a 4x4 matrix whose elements are computed in a coordinate frame {A} fixed to the base
of the chain. Now, if each member is displaced in sequence, starting from the free end,
the displacement operator for the resultant total displacement of the free end will be
given by T
1
T
2
T
3
T
4
. (Note: In this problem you are to use only displacements operators,
not coordinate transformations)
However, if the displacements are done in the reverse order, ie. starting at the fixed
end, and moving in the sequence 1, 2, 3, 4, then the operators T
2
, T
3
, and T
4
no longer
represent the actual displacements.
Determine, in terms of the original T
i
:
(a) The operator for joint 2, when its displacement is done after the displacement
in joint 1. Let us call this operator T
0
2
The first thing to recognize is that this entire question is based on displacement opera-
tors, not frame transformations – this concept was discussed Lecture Notes section 1.2.5,
and is vital to solving this question.
Now, when joint 1 moves it causes a displacement (given by T
1
) which affects the entire
manipulator – including the rotation axes of joints 2, 3, and 4. To find the new rotation
axis corresponding to joint 2, we use a similarity transform:
T
0
2
= T
1
T
2
T
−1
1
(b) The operator for joint 3 when its displacement follows the displacement in
joints 1 and 2 (from part (a)). Let us call this operator T
0
3
下载后可阅读完整内容,剩余4页未读,立即下载
480 浏览量
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2021-03-20 上传
2012-03-13 上传

江水流春去
- 粉丝: 50
- 资源: 352
 我的内容管理
展开
我的内容管理
展开







最新资源
- CSS3遮罩滑动条文字动画特效特效代码
- Mockkator:Mockkator是一个Intellij插件,可用于自动生成Mockk的样板代码
- minDistanceInGraph:最短路径的两个算法:迪杰斯特拉算法和佛洛依德算法
- Osiris:Github API使用者和卡车因子指标提取器
- SVG绘制火焰文字动画特效特效代码
- 第三篇:跨平台QT开发-打包
- 基于SVD分解的PCA降维图像重建MATLAB仿真+仿真操作录像
- shopping.zip
- Swin-Transformer:这是“变形金刚”的官方实现
- mongodb:记录日常写的相关mongo的代码和总结的笔记
- nodetransactionrouting:这是聊天应用程序,进行交易路由
- libevent-2.0.12-stable.tar.gz
- githubr:从R到GitHub的接口
- jQuery基于CSS3加载文字动画特效代码
- Craps-Luk-Pepa:“废话不多”的真实资料库(2020.1)
- Icon Changer-crx插件
