理解相机矩阵:从三维世界到二维图像的转换关键
需积分: 12 28 浏览量
更新于2024-07-09
收藏 2.13MB PDF 举报
"11.1_Camera_matrix.pdf"是一份关于计算机视觉中关键概念——相机矩阵的详细教程。这份文档深入探讨了如何在三维世界与二维图像之间建立映射关系,尤其是在pinhole camera(针孔相机)模型中的应用。相机矩阵是描述这种映射的核心数学工具,它将三维空间中的点投影到二维图像平面上。
首先,让我们了解相机矩阵的基本构成。相机矩阵是一个3x4的矩阵,通常表示为P,它将世界坐标系中的4x1的三维向量(X, Y, Z, 1)映射到图像坐标系中的3x1向量(x, y, 1)。矩阵P包含了三个主要元素:
1. 摄像中心:这是相机光轴与图像平面的交点,通常表示为(X, Y, Z),其最后一维为零,因为它是归一化的。
2. 主点或焦点(principal point, f):这是图像平面上的点,对应于三维空间中的无穷远点,即相机中心在图像平面上的投影。
3. 主轴或对齐轴(principal axis):这是相机的光学轴,决定着图像的几何形状,例如标准照相机通常沿x和y方向。
对于pinhole camera模型,其具体方程如下:
- 图像坐标x的表达式为:x = PX / (Z * f),其中P是相机矩阵,X是世界坐标系中的X值,f是焦距,Z是世界坐标系中的Z值(Z不为零)。
- 同理,y坐标可以通过类似的方式计算,但通常y的方程形式相同,只是用fY替换f。
理解相机矩阵的关键在于它如何处理像素坐标与世界坐标之间的转换。通过矩阵乘法,我们可以将三维空间中的点经过透视变换投射到图像上。此外,矩阵P中的参数还反映了镜头的畸变、视场角等特性,这对于摄影、计算机视觉和机器视觉应用至关重要。
在实际操作中,相机矩阵可以通过校准过程确定,比如标定摄像头,以确保图像中的物体位置与真实世界的相对位置一致。对于深度感知、目标检测、姿态估计等任务,相机矩阵的理解是不可或缺的基础。
11.1_Camera_matrix.pdf提供了一个深入研究相机矩阵及其在图像处理中的应用的起点,涵盖了从理论概念到实际应用的广泛内容,是计算机视觉研究者和开发者的宝贵参考资料。
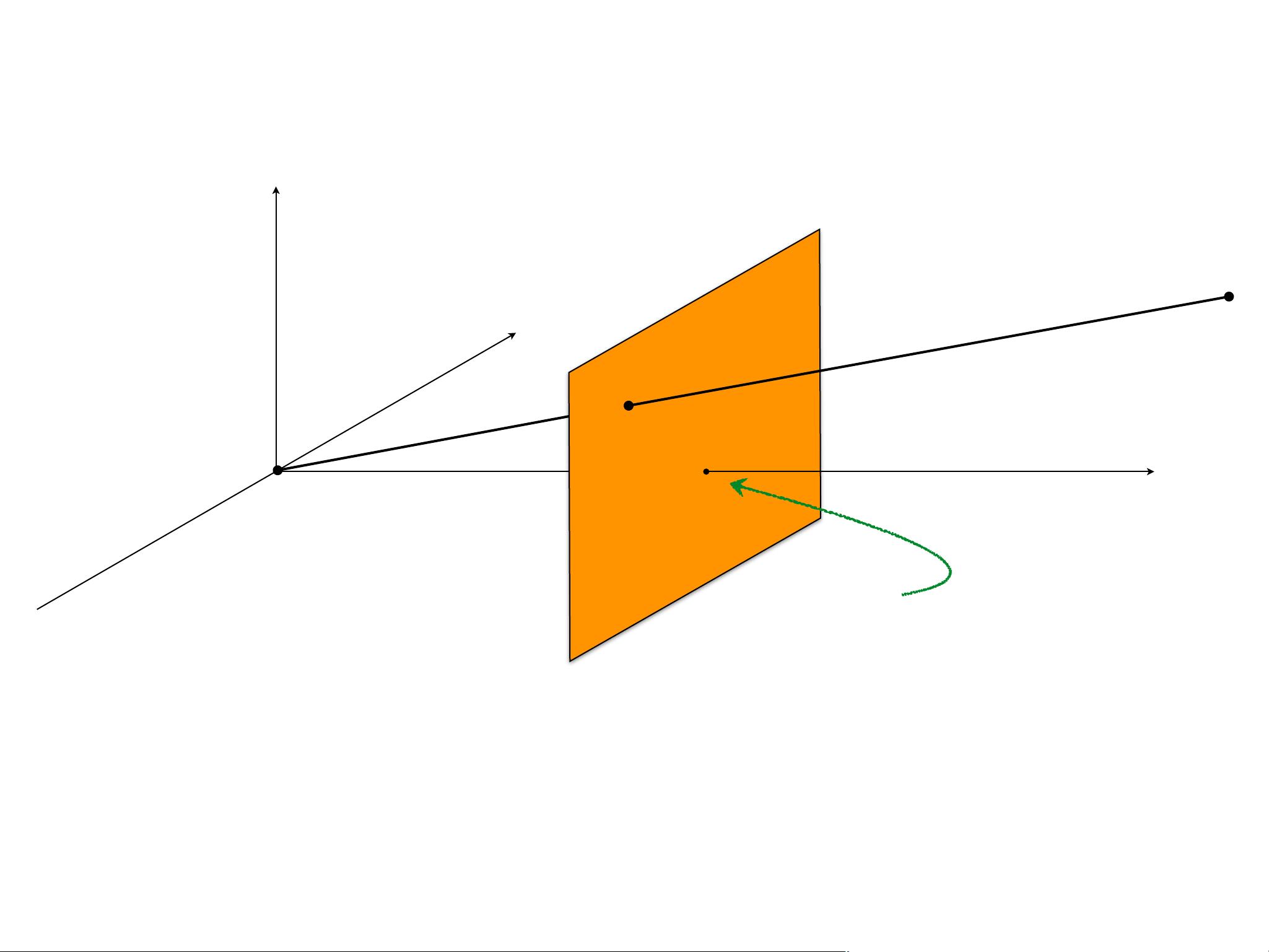
camera center
X
image plane
x
principal axis
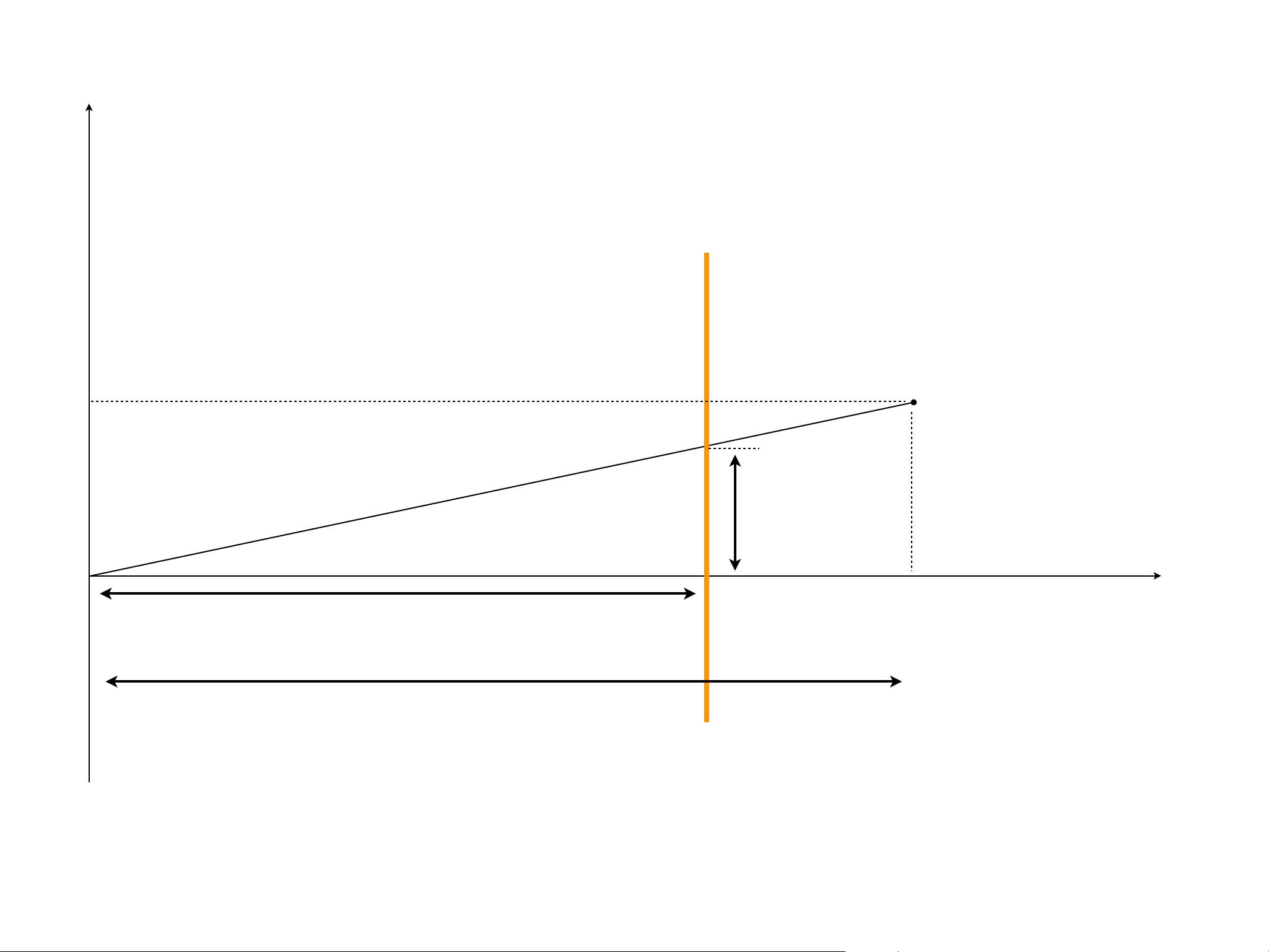
The pinhole camera
x
y
z
z = f
What is the equation for image coordinate x (in terms of X)?
principal point
剩余37页未读,继续阅读
2020-11-12 上传
2019-05-15 上传
2018-06-20 上传
2021-11-25 上传
2023-09-12 上传
2013-05-07 上传
2022-10-29 上传

Upupup6
- 粉丝: 1841
- 资源: 35
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
