MIT研发 Whole-Body Impulse 控制与模型预测控制的高动态四足机器人行进
需积分: 10 40 浏览量
更新于2024-08-05
收藏 3.75MB PDF 举报
"本文主要探讨了麻省理工学院(MIT)在高度动态四足机器人运动控制领域的创新工作,名为'Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control'。研究团队由Donghyun Kim、Jared DiCarlo、Benjamin Katz、Gerardo Bledt和Sangbae Kim等人组成。动态腿部 locomotion 是一个极具挑战性的课题,因为现有的控制方案往往难以处理空中阶段、短步态时间和高速腿部摆动。
在这个研究中,研究人员提出了一种结合了全身控制(Whole-Body Control, WBC)和模型预测控制(Model Predictive Control, MPC)的方法。核心思想是,MPC通过一个简单的模型,在较长的时间尺度上寻找最优的反应力分配。WBC则根据MPC计算出的反应力,进一步计算关节扭矩、位置和速度指令。这种设计与传统WBC方法不同,后者倾向于跟踪预设的身体轨迹,而新控制器更侧重于反应力命令的控制,从而实现高速且具有空中阶段的动态运动。
为了验证控制器的鲁棒性和灵活性,实验在Mini-Cheetah四足机器人上进行了广泛的测试。实验覆盖了六种不同的步态,并在多种环境中进行,包括户外环境,旨在展示其在复杂动态条件下的性能。这种新型的WBC-MPC结合策略旨在提升四足机器人的运动性能,使之能够在各种动态挑战下稳定、高效地移动,这对于未来机器人技术,特别是适用于搜救、物流等领域有着重要的意义。"
Highly Dynamic Quadruped Locomotion via
Whole-Body Impulse Control and Model Predictive Control
Donghyun Kim
1
, Jared Di Carlo
2
, Benjamin Katz
1
, Gerardo Bledt
1
, and Sangbae Kim
1
Abstract— Dynamic legged locomotion is a challenging topic
because of the lack of established control schemes which can
handle aerial phases, short stance times, and high-speed leg
swings. In this paper, we propose a controller combining whole-
body control (WBC) and model predictive control (MPC). In
our framework, MPC finds an optimal reaction force profile
over a longer time horizon with a simple model, and WBC
computes joint torque, position, and velocity commands based
on the reaction forces computed from MPC. Unlike existing
WBCs, which attempt to track commanded body trajectories,
our controller is focused more on the reaction force command,
which allows it to accomplish high speed dynamic locomotion
with aerial phases. The newly devised WBC is integrated
with MPC and tested on the Mini-Cheetah quadruped robot.
To demonstrate the robustness and versatility, the controller
is tested on six different gaits in a number of different
environments, including outdoors and on a treadmill, reaching
a top speed of 3.7 m/s.
I. INTRODUCTION
To fully exploit the hardware capability of legged systems,
we need a controller that can address the challenging issues
related to dynamic locomotion, such as body control during
short stance periods, aerial phases, and high speed swing leg
motion control. Several successful cases for both running
bipeds [1], [2] and quadrupeds [3] have been presented, but
they are either difficult to scale up to high degree-of-freedom
systems [1] or heavily rely on specific system dynamics [2]
or are undocumented [3]. Whole-body control (WBC) is a
strong candidate as a dynamic motion controller because of
its dynamically consistent formulation and general frame-
work, which makes it easy to extend to various systems and
tasks. However, existing WBCs focus on how to follow the
given trajectory by manipulating contact forces, which makes
it nontrivial to address motion involving frequent non-contact
phases such as high speed running.
To tackle the issue, we formulate WBC to follow both
the reaction force and body trajectory commands. The idea
of reaction force tracking originates from the impulse plan-
ning used in Cheetah 2 [4], which demonstrates successful
dynamic bounding and jumping. The underlying idea of [4]
is to plan reaction forces, which are impulses, rather than
CoM trajectory, which is not practical to follow when the
locomotion is extremely dynamic and has significant periods
of under-actuation. In this paper, we embrace the impulse
planning idea in WBC and formulate whole-body impulse
Authors are with the
1
Department of Mechanical Engineering at the
Massachusetts Institute of Technology, and the
2
Department of Elec-
trical Engineering and Computer Science at the Massachusetts Institute
of Technology, Cambridge, MA, 02139, USA. Corresponding Author:
robot.dhkim@gmail.com
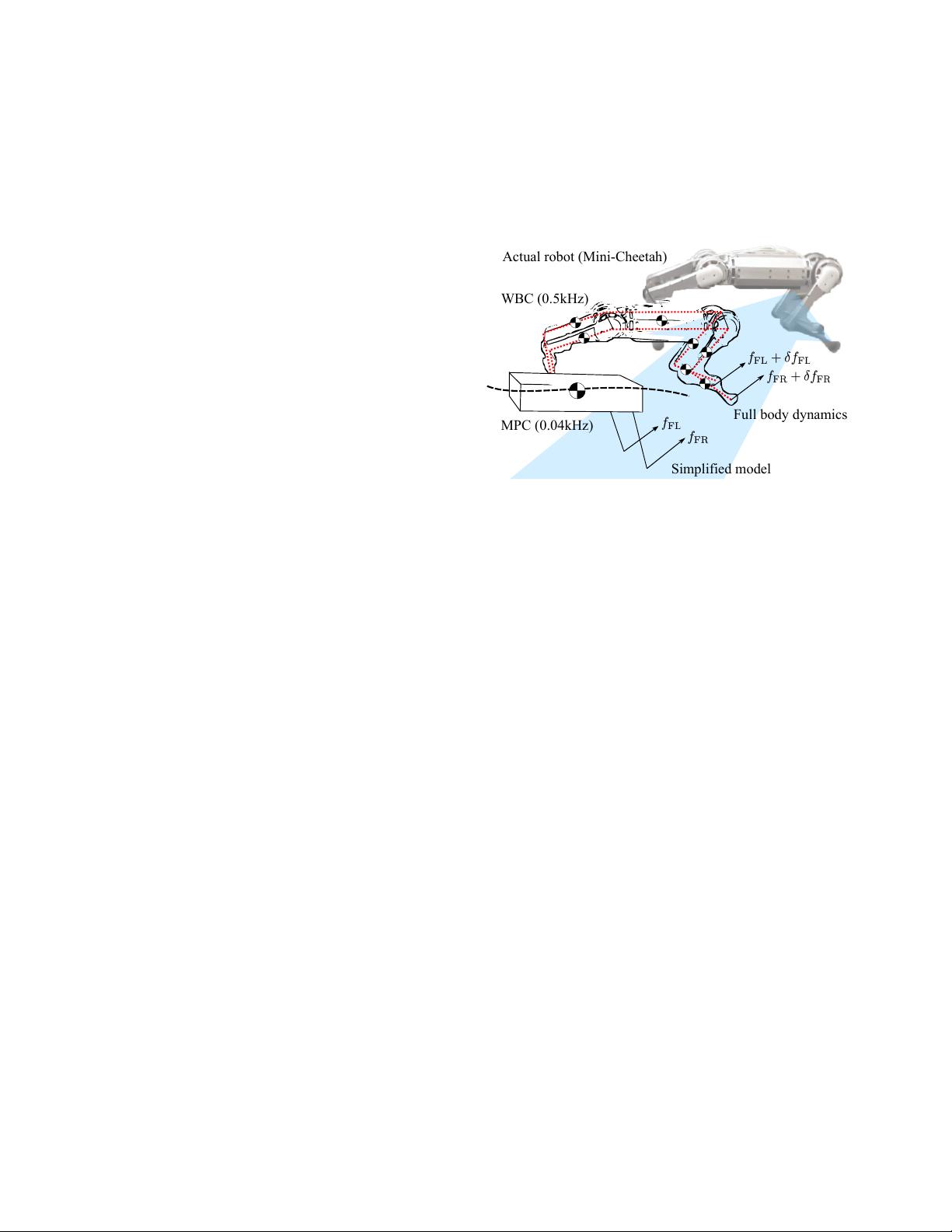
Simplified model
Full body dynamics
Actual robot (Mini-Cheetah)
MPC (0.04kHz)
WBC (0.5kHz)
Fig. 1. Control Architecture. The proposed control architecture consists
of two parts: Model predictive control and whole-body control. The reaction
forces computed by MPC are modified by WBC to incorporate body
stabilization and swing leg control. The final commands found in WBC
are sent to the robot to perform dynamic locomotion.
control (WBIC) that can incorporate both body posture stabi-
lization and reaction force execution. In terms of formulation,
WBIC is not significantly different from the existing whole-
body controllers [5]–[7], but the additional feature, which is
an incorporation of pre-computed reaction forces by relaxing
the floating base control, plays an important role in dynamic
locomotion control. In our formulation, the WBIC is mostly
used to track the ground reaction force profile rather than a
body trajectory.
To find the reaction force command, we utilize model
predictive control (MPC). In our previous work, we demon-
strated that convex MPC can perform various dynamic gaits
at high speed on both Cheetah 3 [8] and Mini-Cheetah [9].
Utilization of MPC enhances the versatility of locomotion,
enabling us to switch between various gaits by simply
changing the contact sequence. However, using MPC with
a simple model has a fundamental limitation in position
control because of its low update frequency (40 Hz in our
implementations) and model simplifications. WBC provides
a solution to the MPC’s limitation by running a high-
frequency feedback loop while still accounting for full-body
dynamics with contact.
On the other hand, the prediction horizon of MPC com-
pliments the WBC perfectly to fill in the WBC’s limita-
tion that it cannot consider more than a single time step
ahead. This limited time horizon issue has been addressed
in [10], [11] which developed an MPC formulation using
full-body dynamics. However, even their highly optimized
solvers barely fit into a 200 Hz update frequency and the
arXiv:1909.06586v1 [cs.RO] 14 Sep 2019
下载后可阅读完整内容,剩余7页未读,立即下载
2021-09-16 上传
2020-12-11 上传
2021-07-12 上传
2018-08-04 上传
2022-01-25 上传
2022-02-09 上传
2021-04-20 上传
2021-02-08 上传
2022-06-02 上传

whalevoy
- 粉丝: 42
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
