红外循迹模块工作原理与应用
需积分: 0 200 浏览量
更新于2024-08-04
1
收藏 268KB DOCX 举报
"这篇文档详细介绍了红外循迹模块的使用,特别是TCRT5000传感器的工作原理和在智能车循迹模式中的应用。"
红外循迹模块是嵌入式系统中常见的一种传感器,用于智能车辆或其他自动化设备的路径跟踪。这种模块的核心组件是TCRT5000传感器,它包含一个红外发射二极管和一个红外接收管。传感器通过发射红外线来探测前方物体,根据反射情况判断路径状况。
模块工作原理如下:
1. 当红外发射二极管发出的红外线没有被反射回来,或者反射回来的强度不足以使红外接收管接收到信号时,接收管会保持关断状态。此时,模块的输出端D0为高电平,指示二极管熄灭,表示前方无检测到物体(如赛道的黑线)。
2. 当有物体(比如黑色跑道)出现并反射红外线,且反射强度足够大,红外接收管会被饱和导通,导致输出端D0变为低电平,指示二极管点亮,表明检测到了物体。
接线方法如下:
- VCC:连接到3-5V电源的正极。
- GND:连接到电源负极。
- D0:提供TTL开关信号输出,用于读取检测状态。
- A0:提供模拟信号输出,不同距离下输出不同的电压,通常可不接。
在循迹小车应用中,黑色跑道能够吸收红外线,使得模块上的光敏三极管关闭,指示二极管熄灭,从而让小车知道应转向。小车的循迹策略包括:
1. 双侧传感器均检测到白色(赛道)时,红外线返回,输出低电平,小车直行。
2. 左侧传感器检测到黑色(跑道),左侧输出高电平,小车需左转。
3. 右侧传感器检测到黑色,右侧输出高电平,小车需右转。
安装和接线过程中,两个红外循迹模块应朝下安装在小车头部两侧,并使用热熔胶固定。VCC和GND分别连接到单片机的5V和GND,D0引脚根据实际需求连接到相应GPIO口。
程序设计方面,主要涉及三个部分:
1. `main.c`:主要处理两个红外传感器的输出引脚电平,根据判断结果控制电机转动。
2. `Motor.c`:包含小车的各种移动函数,如前进、后退、左转、右转和停止。
3. `Delay.c`:提供延时函数,确保动作的平稳执行。
红外循迹模块通过检测红外反射情况,帮助智能车识别赛道路径,实现自主导航。理解和利用这种技术,可以有效提升自动化设备的路径跟踪性能。
循迹模式——红外循迹模式使用介绍
红外循迹模块介绍
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来
或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高
电平,指示二极管一直处于熄灭状态;
被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,
此时模块的输出端为低电平,指示二极管被点亮。
总之一句话:没反射回来,D0输出高电平,灭灯
没反射——D0输出高电平——灭灯
反射——D0输出低电平——点亮
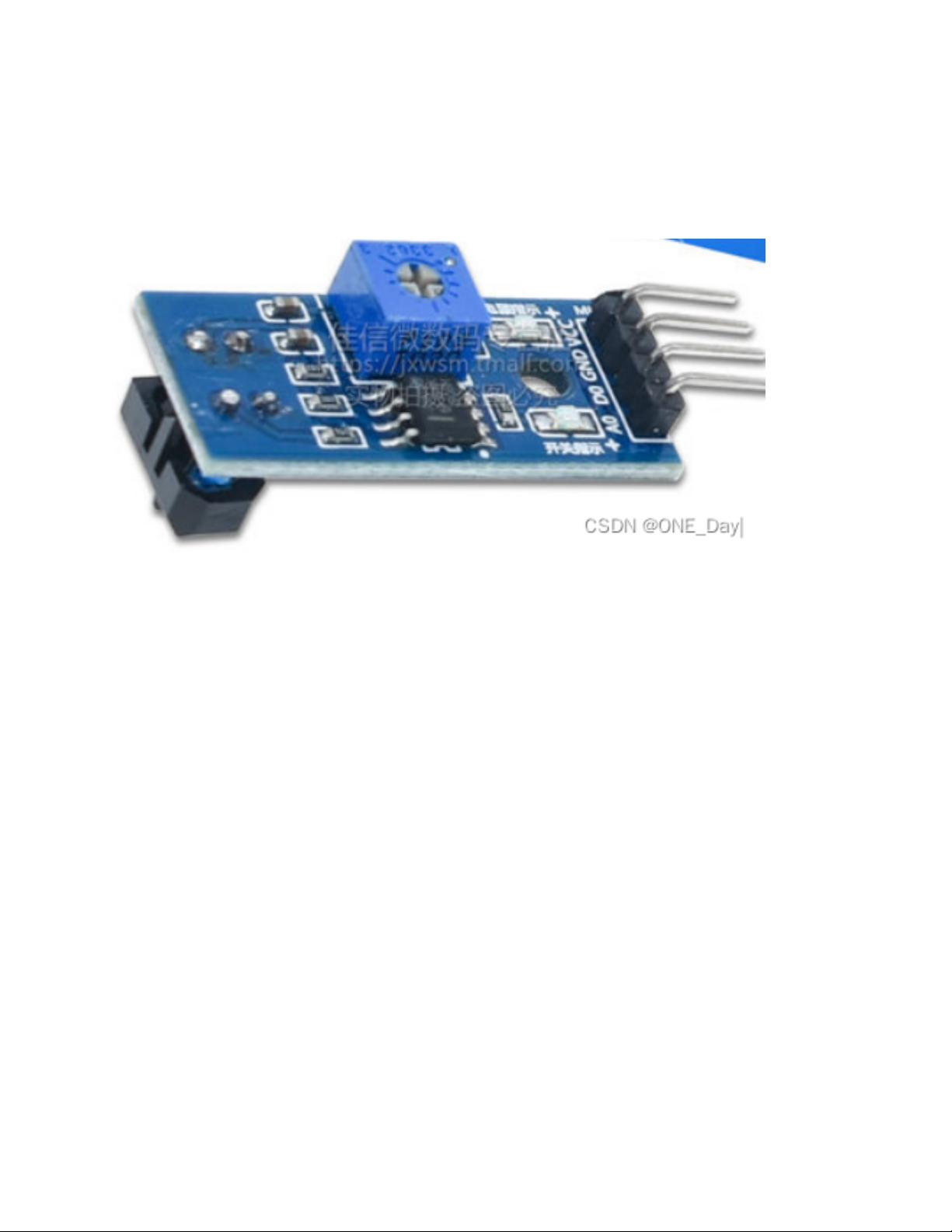
接线
1、VCC:接电源正极(3-5V)
2、GND:接电源负极
3、D0:TTL开关信号输出
4、A0:模拟信号输出(不同距离输出不同的电压,此脚一般可以不接)
下载后可阅读完整内容,剩余3页未读,立即下载
2022-06-30 上传
2021-10-14 上传
2022-07-07 上传
2022-06-30 上传
2023-06-03 上传
2022-07-01 上传
2023-02-27 上传
2022-10-26 上传
2023-09-29 上传

CodingLife99
- 粉丝: 1247
- 资源: 457
 我的内容管理
展开
我的内容管理
展开







最新资源
- bookers2-favorite_comment
- UMI.CMS Debugging Tool-crx插件
- 毕业设计&课设-基于MATLAB的IEEE 802.11p物理层仿真模型.zip
- yak:又一位收藏经理
- rubiks:魔方解集上的蛮力研究
- Koffee:Java字节码汇编程序作为Kotlin DSL
- os:小型操作系统
- HTML5 Canvas生成粒子效果的人物头像html5-canvas-pixel-image-master.zip
- mona:mona.py 的 Corelan 存储库
- QQ群管理-crx插件
- 毕业设计&课设-滑动传递分析工具箱和GUI(Matlab).zip
- ece3552-faceRecognition:ECE 3552的最终项目。人脸识别签到设备
- polaroidz
- MIT-JOS:6.828:操作系统工程2011年秋季
- 基于 html5 & css3 的移动端多级选择框html-multi-selector-master.zip
- vue2-daterange-picker:Vue2日期范围选择器
