汽车CAN总线入门指南:发展、功能与应用
需积分: 50 174 浏览量
更新于2024-07-23
收藏 1.87MB PDF 举报
CAN入门资料是一份针对汽车行业初学者的详细介绍,由瑞萨科技发布于2006年2月,主要涵盖了CAN总线的发展历程、基本原理、功能特性以及开发方法。该资料旨在帮助读者理解CAN总线在现代汽车电子系统中的重要角色。
CAN全称为Controller Area Network,即控制器区域网络,是国际标准化的串行通信协议,由德国博世公司在1986年为了满足汽车行业中对于安全、舒适性、便利性和低成本的需求而推出。CAN通信协议的设计初衷是为了简化线束,实现多个电子控制系统的高效通信,尤其是在数据量大且可靠性要求高的情况下。
资料首先介绍了CAN的概述,包括其定义、应用示例,如发动机管理、车身控制、舒适性系统等。随后,重点阐述了CAN的特征,如错误检测和处理机制,能够容忍错误并快速恢复通信,这对于汽车电子系统的实时性和稳定性至关重要。
CAN协议的核心部分包括不同类型的帧,如数据帧用于传输数据,遥控帧用于发送命令,错误帧用于标识通信问题,过载帧则是在通信繁忙时使用的。此外,资料还详细讲解了帧间隔、优先级设定、位填充、错误分类和处理方式,以及如何通过硬件同步、再同步和调整同步规则来确保通信的正确执行。
使用注意事项部分强调,虽然资料基于博世公司的CAN概要和协议,但并不对具有CAN功能的具体产品提供技术支持或责任担保。这份资料适合于汽车工程师、系统开发者以及希望了解CAN技术的其他专业人士参考。
这份CAN入门资料为想要深入理解汽车CAN总线的读者提供了一个全面且实用的学习资源,从基础概念到具体协议实现,为从事汽车电子领域的人员提供了宝贵的指导。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 8 of 48
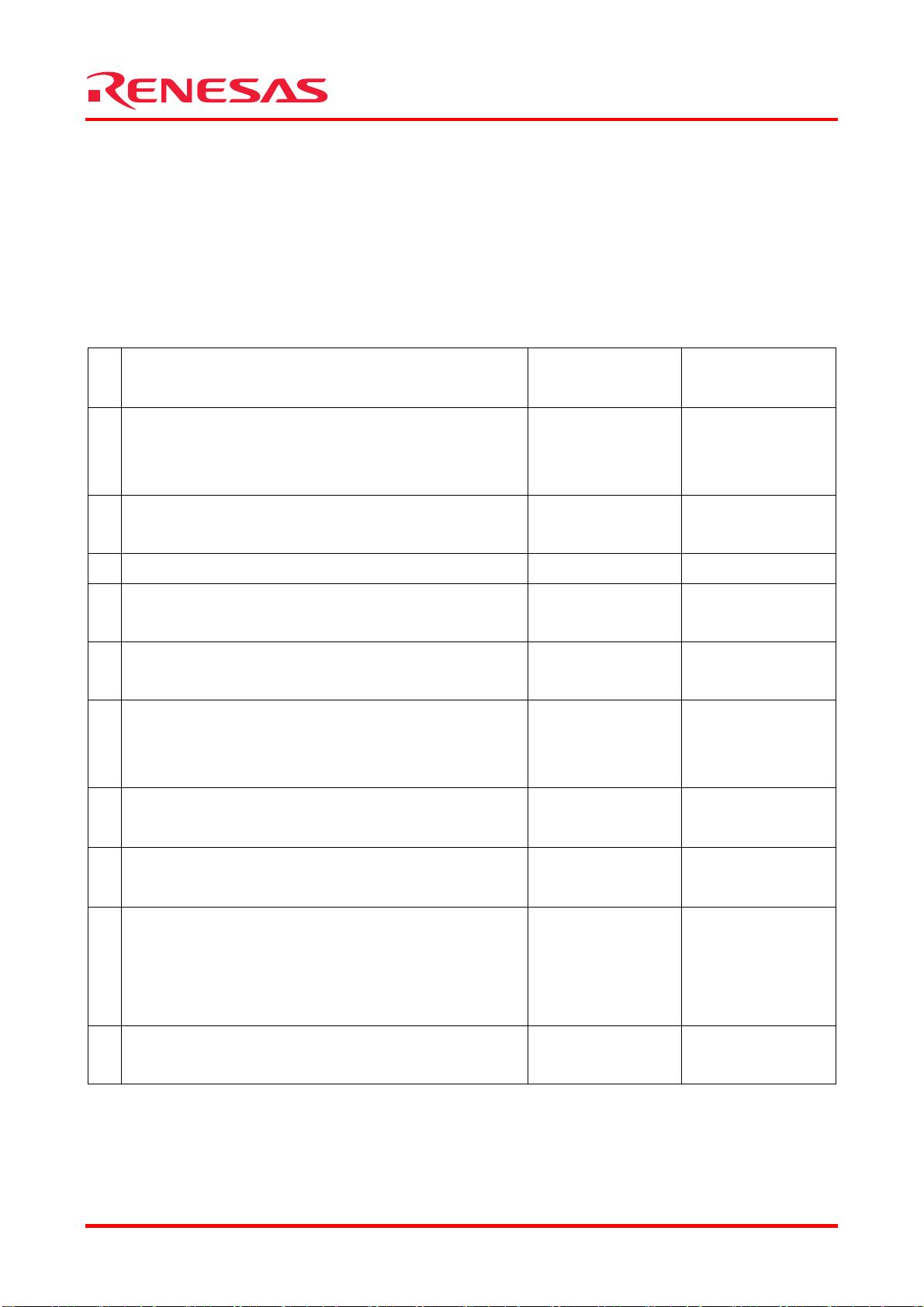
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
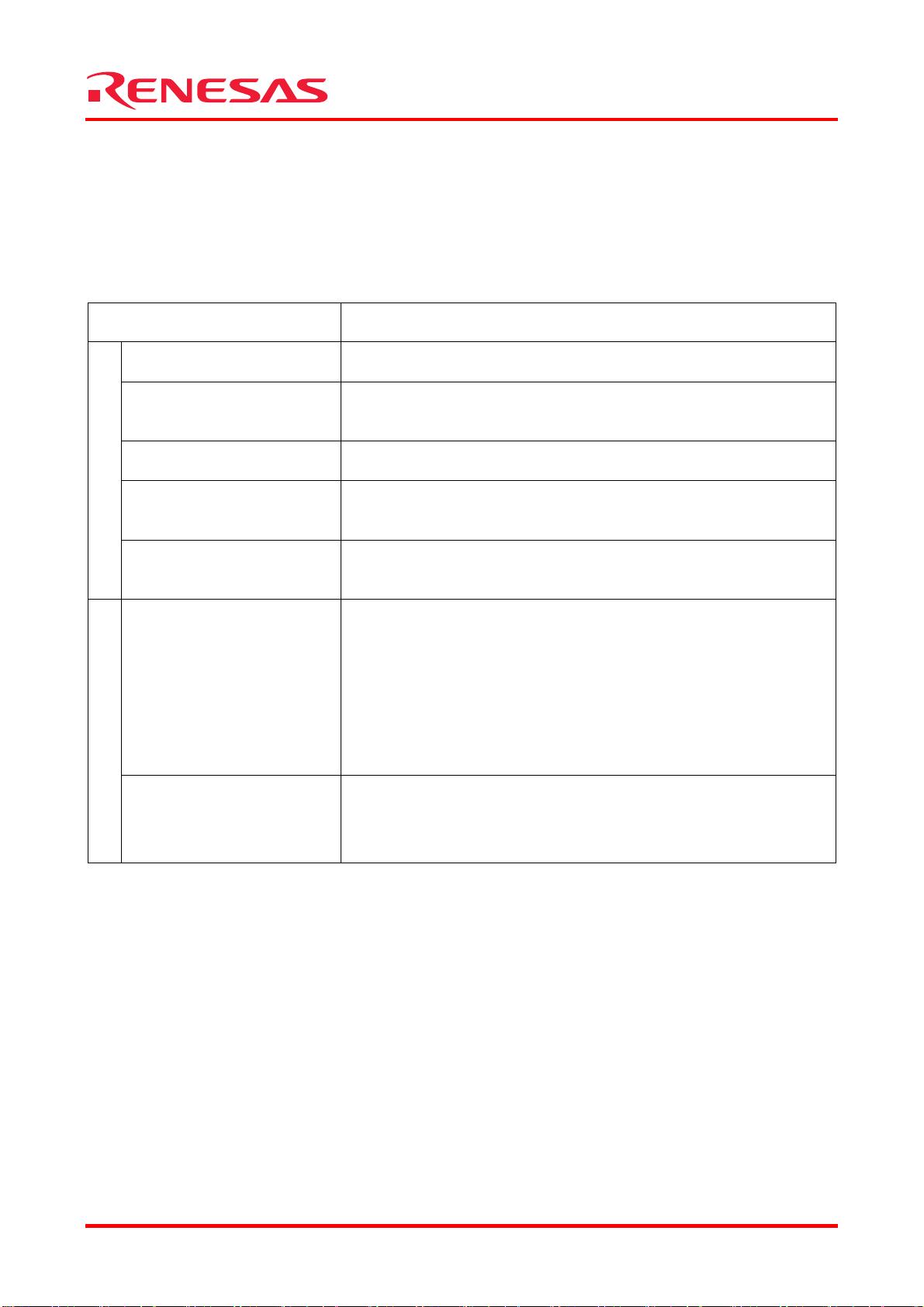
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
2011-04-05 上传
2018-10-20 上传
点击了解资源详情
2023-07-22 上传
2013-11-22 上传
2016-03-18 上传
2021-10-04 上传

songhai210
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 2022-【精品】140页医院智能化系统+综合布线+建筑节能方案+弱点消防动力机房监控综合设计方案-可编辑.pptx.zip
- packages:软件包存储库
- projeto_laravel_clean:清洁服务网站设计
- 如何为Vs2012中开发的项目使用C#创建单元测试用例?
- 2022-47页电力运维抢修中心+智慧园区+火灾报警+数字孪生解决方案-可编辑.pptx.zip
- 磁致伸缩多功能液位仪MG型产品手册
- 简单易用的高速加密工具 BCArchive 2.07.2.zip
- kubernetes-study:Kubernetes生态使用记录
- bookmgmt:这是书籍信息及其材料的示例应用程序
- 测试烧瓶应用
- Tabby Word-crx插件
- AYOAUI:基于WPF,全源码方式写的一个办公管理UI
- 2022-44页智慧水厂生产管理系统解决方案+智能监控诊断调度综合建设方案-可编辑.pptx.zip
- xscjcx,java,源码学习,java源码编程
- paascloud-demo:微服务学习
- 大型高温浓硫酸液下泵及熔融硫磺泵的开发与应用.rar
