机器人学基础:位置与姿态描述及MATLAB实现
需积分: 9 187 浏览量
更新于2024-07-19
收藏 1.74MB PDF 举报
"Robotics__Vision_and_Control_Fundamental_Algorithms_in_MATLAB英文版02-位置与姿态描述"
在机器人学和计算机视觉领域,准确地表示物体在环境中的位置和姿态是至关重要的。这包括机器人、摄像头、工件、障碍物以及路径等。这一章主要探讨了如何用数学方法来描述和表达这些位置和姿态。
位置和姿态的表示通常涉及到坐标框架的概念。坐标框架,或称为笛卡尔坐标系统,由一组正交轴构成,它们在一点相交,这一点被称为原点。如图2.1a所示,一个点可以用相对于某一参考坐标系的坐标向量来描述,这个向量代表了该点相对于参考坐标系的位移。
更常见的情况是,我们需要描述一个对象相对于另一个对象的位置和姿态。例如,图2.1b中,点P可以被描述为相对于对象B的坐标系{B}的坐标向量,而对象B自身又有一个相对于坐标系{A}的相对位置和姿态,记作ξB。在图2.2中,点P可以相对于坐标系{A}或{B}来描述,而{B}相对于{A}的位姿表示为AξB。
在机器人学中,位姿通常包括位置和姿态两个部分。位置是指物体在三维空间中的平移,而姿态则涉及物体的旋转。为了表达旋转,我们可以使用欧拉角、四元数或旋转矩阵等不同的表示方式。欧拉角通过三个角度来描述旋转,四元数提供了一种无奇异性的表示,而旋转矩阵则是一种更直观且常用的表示方法,它是一个3x3的正交矩阵,保持向量长度不变。
MATLAB作为强大的计算工具,提供了机器人工具箱和机器视觉工具箱,用于实现这些位姿描述的计算和操作。这些工具箱包含了处理姿态转换、坐标变换和几何运算的函数,使得开发者可以方便地在不同坐标系之间进行坐标变换,并实现对机器人运动和视觉数据的处理。
在实际应用中,例如工业机器人在装配作业时,需要精确地知道其末端执行器相对于工作台的位置和姿态,以便正确抓取和放置工件。同样,移动机器人通过相机感知环境,也需要理解其自身的位姿,以便导航和避障。飞行器则需要实时计算其相对于地面的位置和姿态,以实现稳定飞行和精确操控。
理解和掌握位置与姿态的表示方法是进入机器人学和计算机视觉领域的基础。通过MATLAB中的工具箱,可以方便地实现这些理论概念的实际应用,从而推动机器人技术的发展和创新。
20
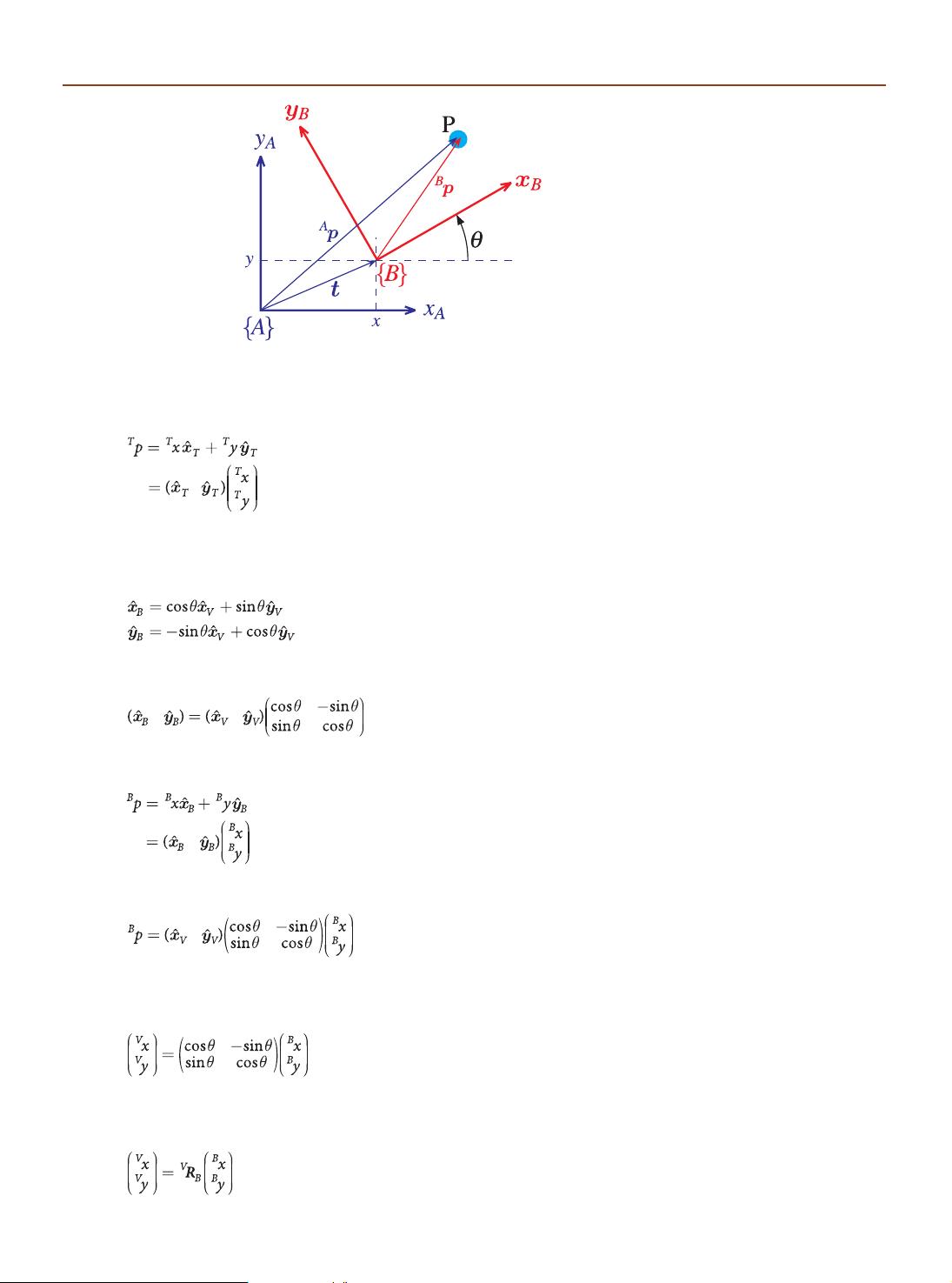
To consider just rotation we create a new frame {V} whose axes are parallel to those of
{A} but whose origin is the same as {B}, see Fig. 2.7. According to Eq. 2.2 we can express
the point P with respect to {V} in terms of the unit-vectors that define the axes of the frame
(2.3)
which we have written as the product of a row and a column vector.
The coordinate frame {B} is completely described by its two orthogonal axes which
we represent by two unit vectors
which can be written in matrix form as
(2.4)
Using Eq. 2.2 we can represent the point P with respect to {B} as
and substituting Eq. 2.4 we write
(2.5)
Now by equating the coefficients of the right-hand sides of Eq. 2.3 and Eq. 2.5 we
write
which describes how points are transformed from frame {B} to frame {V} when the
frame is rotated. This type of matrix is known as a rotation matrix and denoted
V
R
B
(2.6)
Fig. 2.6.
Two 2D coordinate frames {A}
and {B} and a world point P.
{B} is rotated and translated
with respect to {A}
Chapter 2
·
Representing Position and Orientation
剩余26页未读,继续阅读
2017-12-23 上传
2018-03-06 上传
2017-12-23 上传
2017-12-23 上传
2017-12-23 上传
2018-03-06 上传
2017-12-23 上传
2017-12-23 上传
2018-03-06 上传

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
