LFMCW雷达技术解析:线性调频与太赫兹应用
版权申诉
83 浏览量
更新于2024-06-21
收藏 2.3MB PDF 举报
"调频连续波解析.pdf"
本文主要探讨了调频连续波(FMCW)雷达系统,特别是线性调频连续波(LFMCW)雷达的关键技术和工作原理。FMCW雷达通过频率调制连续波来获取目标的距离和速度信息。线性调频在获取距离信息方面尤其适合,并且在FFT处理中表现优异。LFMCW雷达具有高距离分辨率、低发射功率、高接收灵敏度、结构简洁等优势,没有距离盲区,抗隐身和抗干扰能力强,适用于近距离应用。
LFMCW雷达的主要优点包括:调制可通过固态发射机轻松实现,距离信息的提取可以通过FFT处理器完成,信号不易被传统截获雷达检测。然而,它也存在一些缺点:随着作用距离的增加,发射机泄漏到接收机的功率也会增加,这限制了其作用距离;另外,由于采用超大时带积的线性调频信号,存在距离-速度耦合问题,这会导致实际分辨能力下降以及运动目标测距误差。
3.1.2部分提到了太赫兹频段的LFMCW雷达系统,太赫兹波段拥有极高的频率,可以提供更精细的分辨率,对于一些特定应用如生物医学、材料分析和安全检测非常有用。在太赫兹频段,LFMCW雷达可能面临新的技术挑战,比如信号产生、探测器设计以及噪声抑制等问题。这些挑战需要深入研究以优化系统的性能和实用性。
此外,LFMCW雷达的信号处理是其核心技术之一。通过快速傅里叶变换(FFT),可以有效地将时间域的信号转换到频率域,从而解码出目标的距离和速度信息。在信号处理中,还需要考虑动态范围、噪声抑制和目标区分算法,以确保在复杂环境下准确地检测和跟踪目标。
在实际应用中,LFMCW雷达通常用于交通监控、自动驾驶汽车、工业自动化、无人机避障以及建筑物内的人员定位等场景。为了克服距离-速度耦合问题,研究人员可能会采用先进的信号处理技术,如匹配滤波器和多普勒分析,以减小测距误差并提高速度估计的准确性。
LFMCW雷达系统在不断发展中,结合太赫兹技术的应用,有望在多个领域发挥重要作用。但同时也需要持续解决其固有的技术难题,以实现更高效、更精确的雷达性能。
区间均匀分布的独立随机变量
u
,令
u=F
(
x
),有:
1
ln 1
weibull
x u
(3.16)
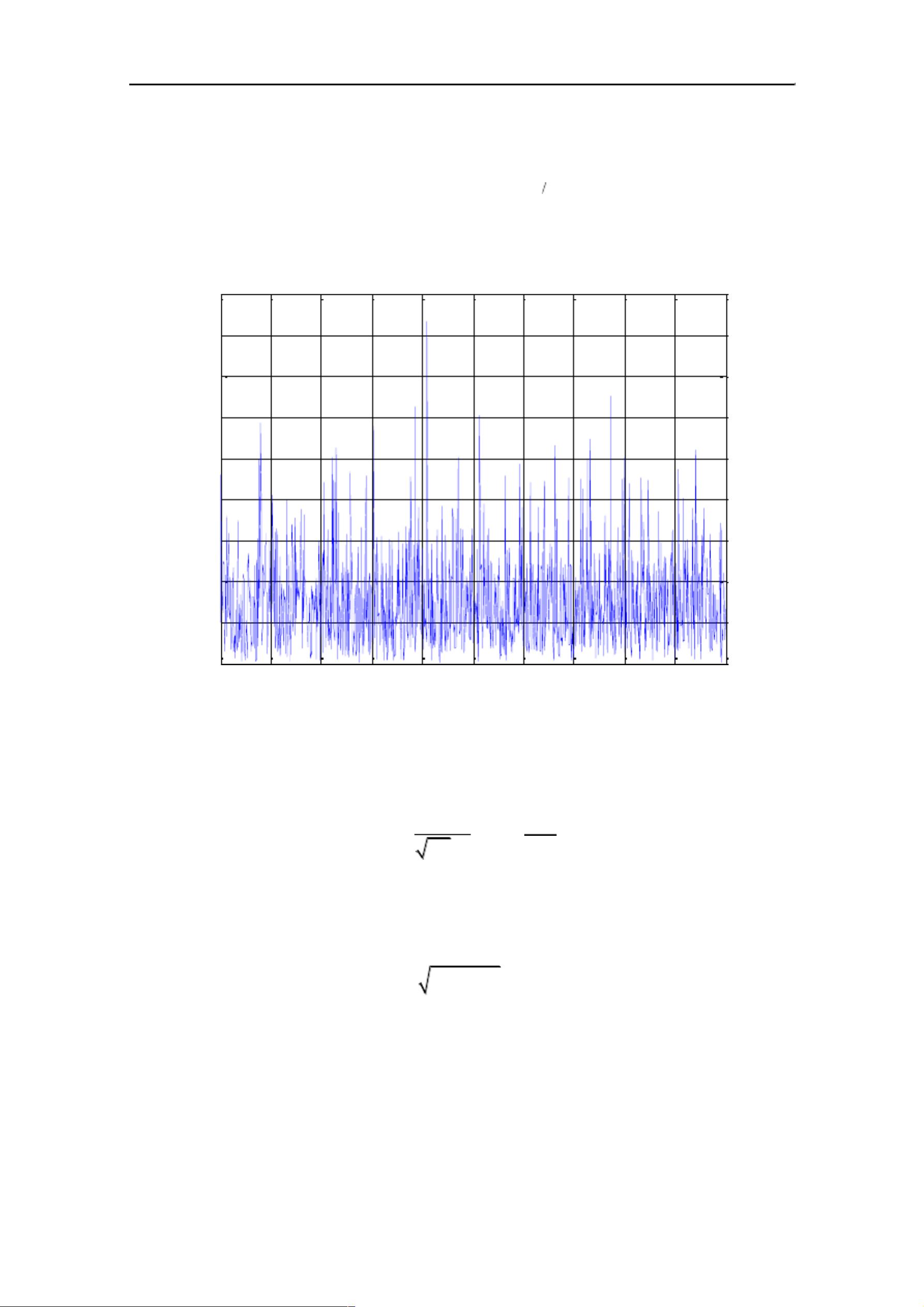
得到韦伯尔杂波幅度分布的仿真如图
20
。
0 100 200 300 400 500 600 700 800 900 1000
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
x 10
-6
韦 伯 尔 分 布
样 本 数
幅
度
图
2
韦伯尔杂波分布仿真
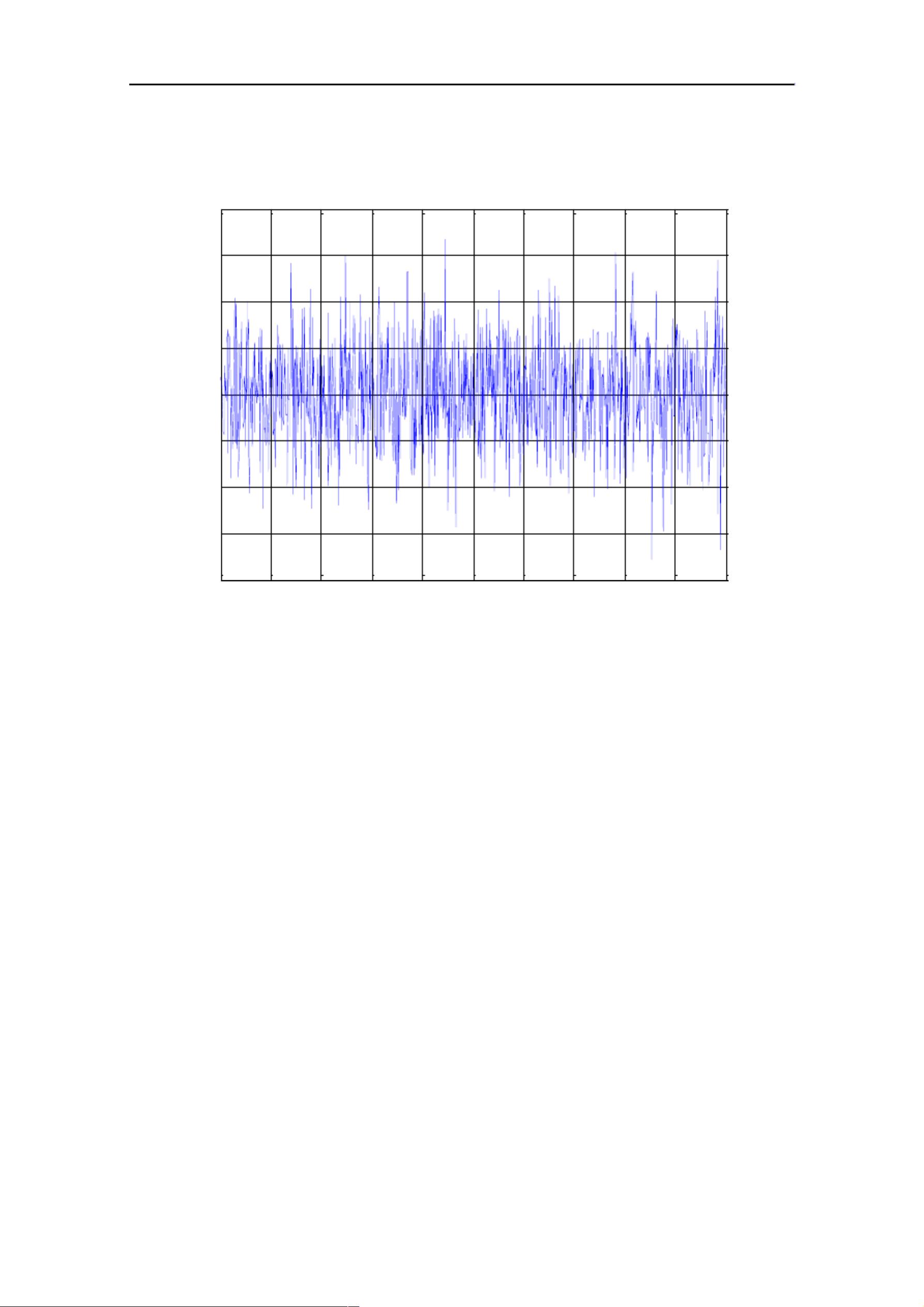
通常可将噪声看作高斯白噪声,其概率密度函数:
2
2
1
exp
2
2
n
n
x
f x
(3.17)
只要产生服从
N
(
0
,
2
n
)零均值高斯分布的白噪声就模拟了各路回波中的噪
声。此处,本文采用反变换法产生高斯分布的随机噪声。所以:
1 2
2ln sin 2
gauss n
x u u
(3.18)
式中
1
u
和
2
u
是相互独立的
[0,1]
区间均匀分布的随机序列,
n
为噪声方差。
本文中所加噪声为高斯白噪声,令
8
1 10
n
,则噪声幅度分布的仿真如图
剩余41页未读,继续阅读
2022-06-11 上传
2021-12-08 上传
2020-04-04 上传
2020-04-04 上传
2012-10-16 上传
2010-08-28 上传
2020-09-24 上传

hhappy0123456789
- 粉丝: 77
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- DSCI_525_group21
- 用C++实现的ISODATA算法
- gildedrose:用于与声纳玩的镀金玫瑰的实现
- 基于pytorch及深度学习在实例分割时实时检测目标
- AdBool:主动式广告包会打断反禁止消息
- Question-with-javascript-practices
- linux-ES6中的跨平台linux命令.zip
- message_song_pppsdwewerewrsd.rar
- 友好聊天Android
- 三菱PLC 5U MC协议.rar
- windows xpmode 安装文件
- libc-manual_PL:GNU C库波兰语翻译-开源
- OOP_[removed]面向对象的Javascript编程
- Keyoff:Keyoff是易于访问的虚拟机,可在5分钟内临时禁用键盘上的键以测试键,清理和修改计算机
- linux-Linux0.12内核代码中文注释.zip
- Torrent 客户端 BiglyBT 2.7.0 + x64.zip
