单目移动相机的在线概率稠密重建
需积分: 12 124 浏览量
更新于2024-09-07
收藏 3.88MB PDF 举报
"这篇论文提出了一种使用单目移动相机进行在线概率稠密重建的方法,旨在解决由于视差不足、视觉尺度变化和姿态误差等问题导致的运动立体深度估计的挑战。通过利用连续深度估计的空间和时间相关性,提高了单目深度估计的鲁棒性和准确性。该方法采用在线递归的概率模型计算深度估计,并考虑相应的协方差和内点概率期望,将这些深度假设融合到具有不确定性意识的密集3D模型中。通过在TUM RGB-D SLAM & ICL-NUIM数据集上的比较以及室内和室外的在线实验,证明了所提方法的有效性和效率。"
本文关注的是移动相机的稠密重建问题,这是计算机视觉和机器人定位导航中的关键任务。传统的稠密重建技术通常依赖于立体匹配或结构光设备,但这种方法在单目相机移动时面临挑战,如视差小、视觉尺度变化和姿态估计误差等。为了解决这些问题,论文提出了一个概率框架,利用连续帧之间的空间和时间相关性来增强深度估计。
具体来说,该方法首先建立一个在线、递归的概率模型,用于计算每帧的深度估计,并同时估计其协方差和内点概率期望。协方差表示深度估计的不确定性,而内点概率期望则反映了估计的可靠性。这种概率模型允许系统处理不确定性,从而提高整体重建的准确性和鲁棒性。
将这些深度假设整合到3D模型的过程中,论文采用了考虑不确定性的方法,这意味着不仅考虑了点云的几何信息,还考虑了估计的置信度。这有助于减少错误估计对最终模型的影响,特别是在环境变化快速或光照条件复杂的情况下。
为了验证所提出的算法性能,作者在TUM RGB-D SLAM和ICL-NUIM数据集上进行了对比实验,与现有的最先进的方法进行了对比。此外,还进行了实际的室内和室外在线实验,以展示方法在不同场景下的表现。
这篇论文提供了一种创新的单目相机稠密重建方法,通过概率模型和不确定性处理,提高了移动相机在复杂环境中的重建效果和鲁棒性。这一工作对于移动机器人的自主导航、3D地图构建等领域具有重要的理论和实践意义。
Probabilistic Dense Reconstruction from a Moving Camera
Yonggen Ling
1
, Kaixuan Wang
2
, and Shaojie Shen
2
Abstract— This paper presents a probabilistic approach for
online dense reconstruction using a single monocular camera
moving through the environment. Compared to spatial stereo,
depth estimation from motion stereo is challenging due to
insufficient parallaxes, visual scale changes, pose errors, etc. We
utilize both the spatial and temporal correlations of consecutive
depth estimates to increase the robustness and accuracy of
monocular depth estimation. An online, recursive, probabilistic
scheme to compute depth estimates, with corresponding co-
variances and inlier probability expectations, is proposed in this
work. We integrate the obtained depth hypotheses into dense 3D
models in an uncertainty-aware way. We show the effectiveness
and efficiency of our proposed approach by comparing it with
state-of-the-art methods in the TUM RGB-D SLAM & ICL-
NUIM dataset. Online indoor and outdoor experiments are also
presented for performance demonstration.
I. INTRODUCTION
Accurate localization and dense mapping are fundamental
components of autonomous robotic systems as they serve
as the perception input for obstacle avoidance and path
planning. While localization from a monocular camera has
been well discussed in the past [1]–[5], online dense re-
construction using a single moving camera is still under
development [6]–[9]. Since monocular depth estimation is
based on consecutive estimated poses and images, main
issues of it are: imprecise poses due to localization er-
rors, inaccurate visual correspondences due to insufficient
parallaxes and visual scale changes, etc. Depth estimation
from traditional spatial stereo cameras (usually in the front-
parallel setting), however, avoids the issues met with motion
stereo. Thus many algorithms based on stereo cameras have
been developed in the past decades [10, 11]. The significant
drawback of spatial stereo is its baseline limitation: distant
objects can be better estimated using longer baselines be-
cause of larger disparities; while close-up structures can be
better reconstructed using shorter baselines because of larger
visual overlaps. Moreover, for real world applications such as
mobile robots, phones and wearable devices, it is impossible
to equip them with long baseline stereo cameras because
of the size constraint. If the baseline length, compared to
the average scene depth of the perceived environment, is
relatively small, images captured on stereo cameras will be
similar. As a result, visual information from stereo cameras
degrades to the same level as that obtained by a monocular
camera.
1
Tencent AI Lab, China.
2
The Hong Kong University of Science
and Technology, Hong Kong, SAR China. Correspondence to: Yonggen
Ling ylingaa@connect.ust.hk, Kaixuan Wang and Shaojie Shen
{kwangap, eeshaojie}@ust.hk. This work was partially sup-
ported by HKUST institutional studentship.
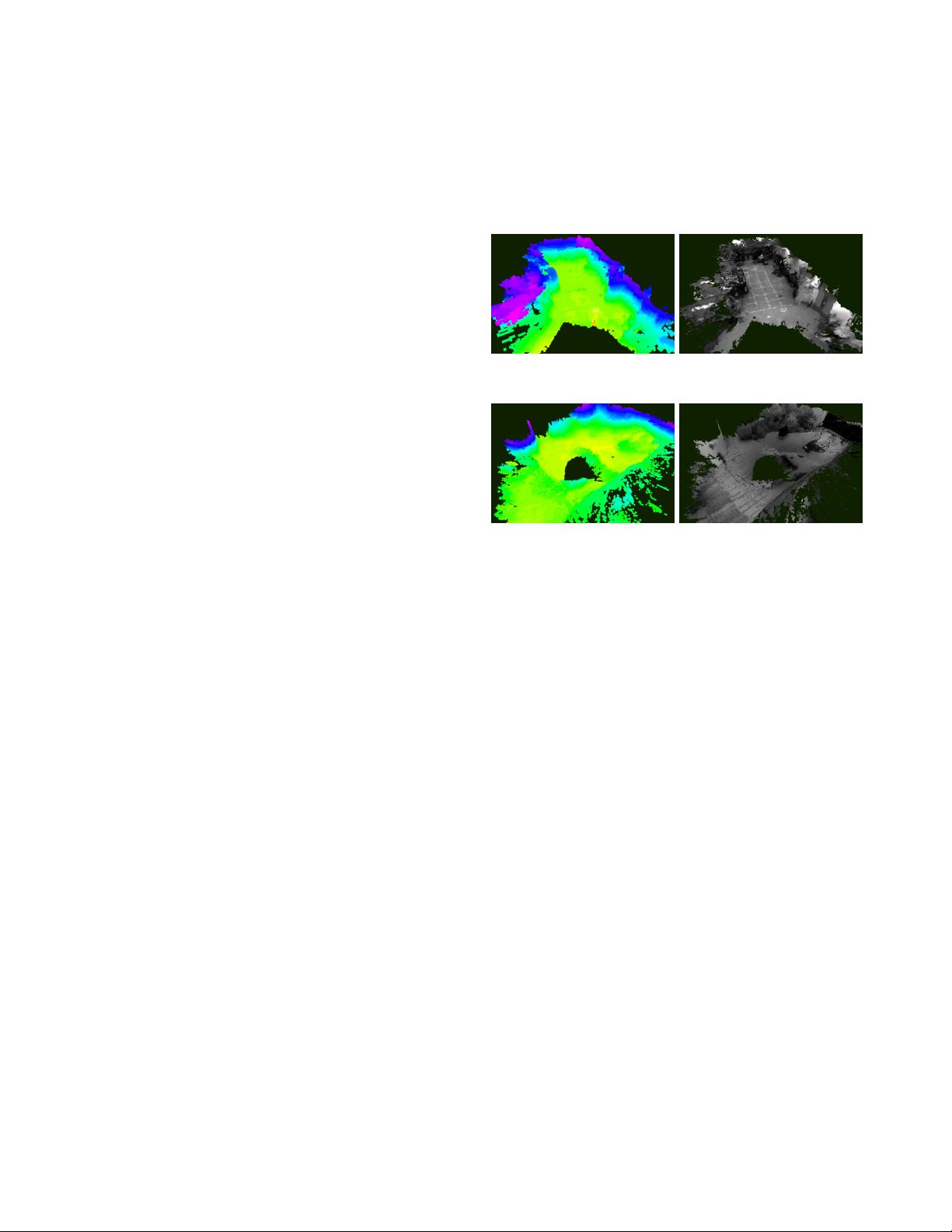
(a) Dense indoor reconstruction for
motion planning.
(b) Meshing view of indoor recon-
struction for visualization.
(c) Dense outdoor reconstruction for
motion planning.
(d) Meshing view of indoor recon-
struction for visualization.
Fig. 1. Dense reconstruction of an indoor/outdoor environment from
a single moving camera. (a)(c) Reconstruction for robotic applications,
such as motion planning and obstacle avoidance. Colors vary w.r.t. the
height to show the structure of the reconstructed dense environment.
(b)(d) Meshing view by applying marching cubes [12] on TSDFs for
visualization. More details can be found at: https://1drv.ms/v/s!
ApzRxvwAxXqQmlW9ZOrp9hdA7ude.
Fundamentally different from passive cameras, time-of-
flight (TOF) cameras as well as structure-light cameras,
emit light actively. They are able to provide high accuracy
depth measurements. With the advent of Microsoft Kinect
and ASUS Xtion, dense reconstruction algorithms based on
active depth cameras [13]–[15] have achieved impressive
results in recent years. Unfortunately, active sensors do not
work under strong sunlight, which limits their application to
indoor environments.
This paper focuses on dense reconstructions using a single
monocular camera, which adapts to both indoor and outdoor
environments with various scene depth ranges. Comparing
to existing methods [7, 9, 13]–[16], we make careful im-
provements to multiple sub-modules of the whole mapping
pipeline, resulting in substantial gains in the mapping perfor-
mance. The main contributions of this paper are as follows:
• A joint probabilistic consideration of depth estimation
and integration.
• A detailed discussion of aggregated costs and their
probability modeling.
• An online, recursive, probabilistic depth estimation
scheme that utilizes both the spatial and temporal cor-
relations of consecutive depth estimates.
• Open-source implementations available at
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Madrid, Spain, October 1-5, 2018
978-1-5386-8093-3/18/$31.00 ©2018 IEEE 6364
下载后可阅读完整内容,剩余7页未读,立即下载
2020-11-02 上传
2021-02-07 上传
2021-02-21 上传
2021-12-09 上传
2018-06-12 上传
2021-02-07 上传
2019-07-24 上传

CLM_Only
- 粉丝: 21
- 资源: 46
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
