




清华大学飞思卡尔智能车直立控制方案详解
下载需积分: 36 | PDF格式 | 4.98MB |
更新于2024-07-17
| 131 浏览量 | 举报
飞思卡尔智能车直立入门方案是由清华大学提供的针对第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组的直立行车参考设计。这个方案旨在帮助初学者理解并实现智能车辆的直立控制,适用于那些想要在直立车项目上入门的工程师和技术爱好者。
该方案涵盖了多个关键模块,包括:
1. **前言**:介绍了直立行走任务的基本概念,以及比赛对于车辆稳定性的高要求。
2. **原理篇**:
- **直立行走任务分解**:将复杂任务分解为速度控制、方向控制和平衡控制三个部分。
- **车模控制**:详细阐述了如何通过分解控制来保持车模直立,如通过倾角传感器监测、速度和方向的精确调整。
- **测量技术**:介绍了角度和角速度的测量方法,以及如何利用这些数据进行精确控制。
- **控制算法总图**:给出了整个控制系统的工作流程图,展示了各部分之间的协调。
3. **电路设计篇**:详述了电路布局,包括整体电路框图、DSC(数字信号控制器)的使用、倾角传感器、电机驱动、速度传感器、电磁线检测和角度计算电路的设计。
4. **机械设计篇**:
- **车模简化改装**:对车模进行了必要的机械改造,以适应直立控制的需求。
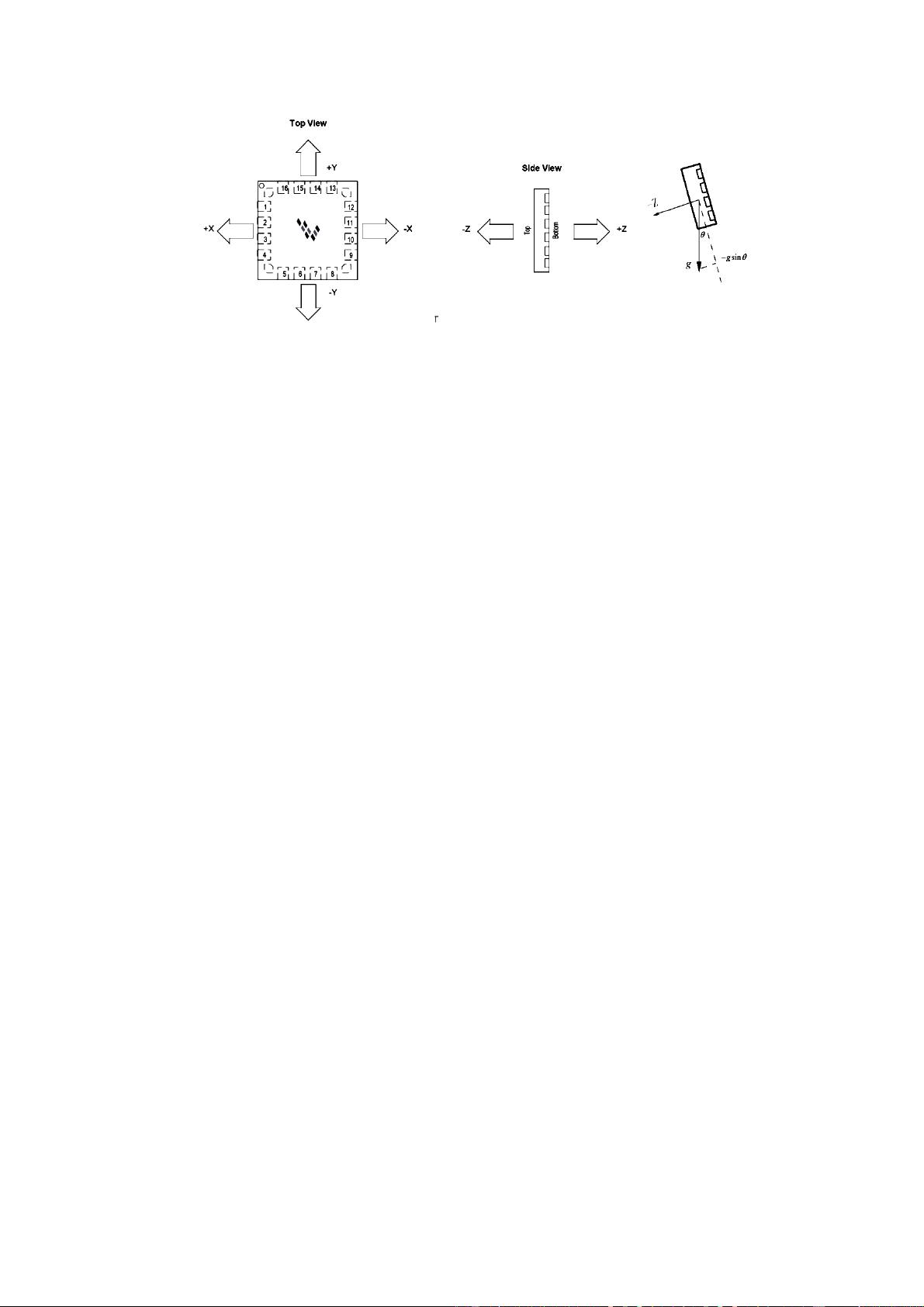
- **传感器安装**:明确了传感器在车模中的定位,确保准确的数据采集。
- **注意事项**:提供了在设计和施工过程中需要注意的关键点。
5. **软件开发篇**:
- **软件功能与框架**:描述了软件结构,包括其主要功能模块和工作流程。
- **硬件资源配置**:明确了DSC的硬件配置要求。
- **算法实现**:分享了关键控制算法的实现原理。
6. **车模调试篇**:
- **调试参数**:列出了调试过程中需要关注的关键参数。
- **调试条件**:指明了理想的调试环境和步骤。
- **调试过程**:包括静态和动态参数调试,以及如何通过不断改进提高车模的整体性能。
7. **结束语**:总结了整个方案的学习价值和可能的后续发展。
附录部分则包含了丰富的图表,如车辆运动模型图、控制系统示意图、传感器原理图等,有助于读者深入理解理论和实践操作。
这个方案是实践性和理论性相结合的,适合对智能车技术感兴趣的学生和工程师进行学习和参考,通过实际操作提升对直立车控制的理解和技能。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
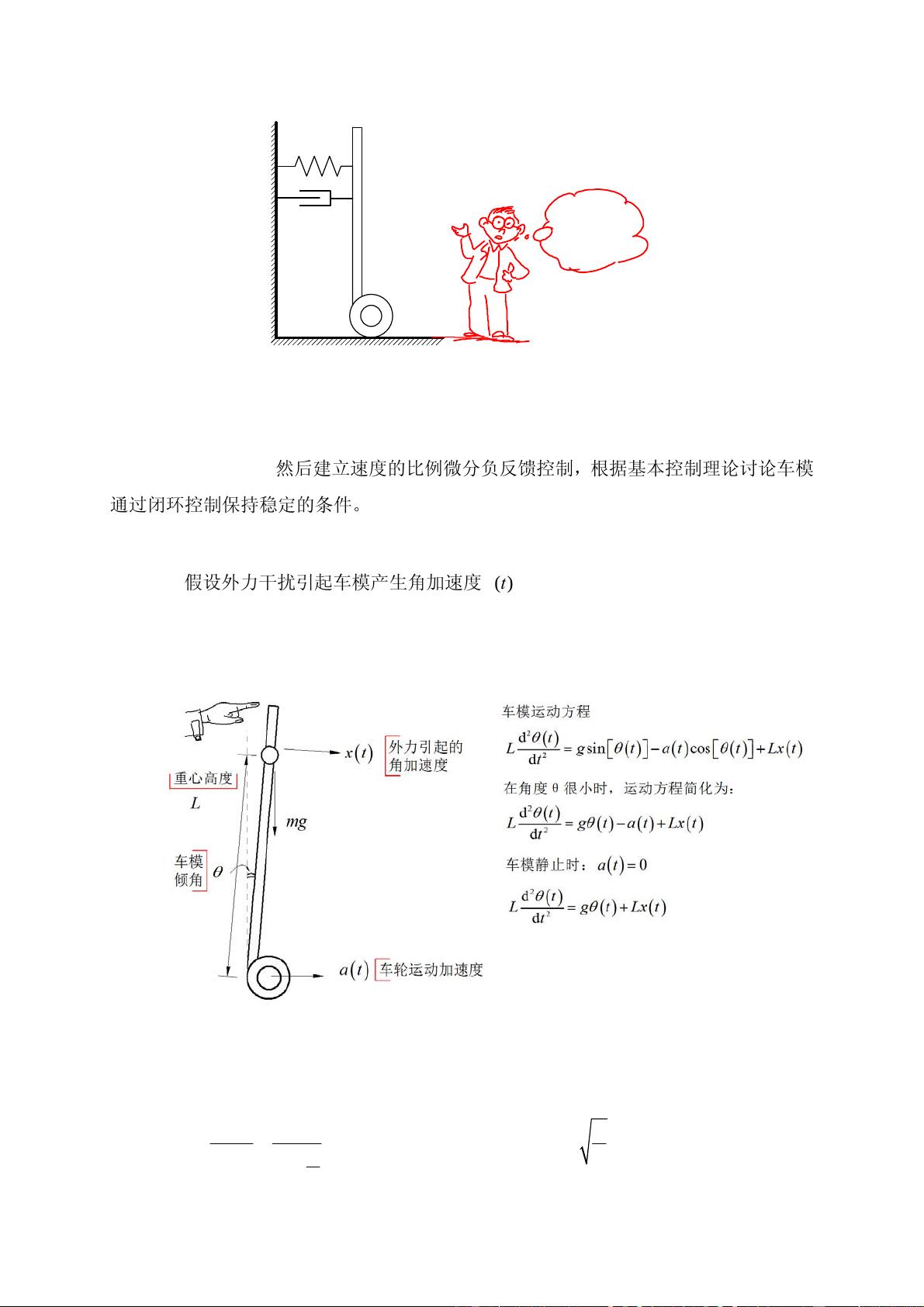
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
图 2‐11 车模运动方程
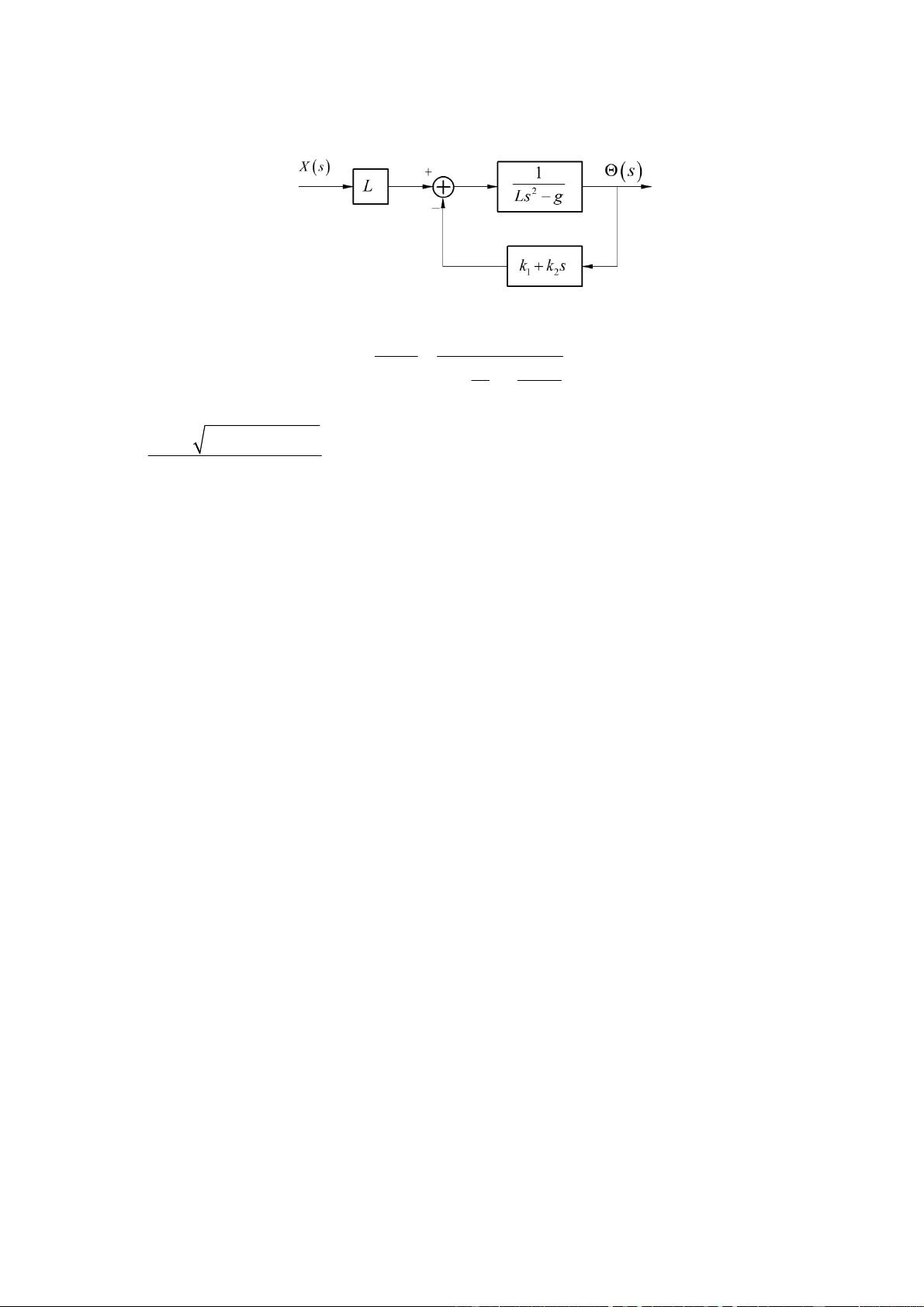
对应车模静止时,系统输入输出的传递函数为:
()
()
()
2
1
s
Hs
g
Xs
s
L
Θ
==
−
,此时系统具有两个极点
p
g
s
L
=±
。一个极点位于 s 平面的
16
剩余107页未读,继续阅读
相关推荐
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

CY_GAO
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- Python实现音量控制与调试技巧
- 高效管理即将举行的Zoom会议工具
- Diffie-Hellman协议遭受MITM攻击演示及安全聊天系统破解
- HTML与CSS基础:创建彩虹效果的实验室指导
- Python环境下privateerccpemwrapper使用教程
- Nexmo API实现短信发送的简易指南
- 专业串口调试工具的使用与配置教程
- TabStructNet:表结构识别的创新代码实现
- 开源REST API客户端实现,助力C++ API端点测试
- 美联储经济影响力的深入解析
- 封装Ruby扩展模块的Makefile实践
- OpenGL源代码实现VC打印预览功能解析
- 27张半透明风格公司介绍PPT图表模板下载
- 许昌POI百度矢量数据WGS84坐标系2021年最新版
- 基于Kotlin的Spring Boot项目模板快速上手指南
- 数字PPT素材模板下载:0至9图标集合






















