CANFD通信协议详解与修订历史
需积分: 26 189 浏览量
更新于2024-06-30
收藏 4.96MB PDF 举报
"CANFD-Communication_protocol,CANFD通信协议"
CANFD(Controller Area Network with Flexible Data-rate)是一种高速通信协议,它扩展了传统的CAN(Controller Area Network)协议,允许更高的数据传输速率和更大的数据段长度。CANFD协议在汽车电子、工业自动化和其他嵌入式系统中广泛应用,因为它能提供更快的通讯速度和更高的灵活性。
CANFD协议的主要特点包括:
1. **增强的数据传输速率**:与CAN协议相比,CANFD可以达到更高的数据传输速率,最高可达5 Mbps,这使得实时数据交换更为迅速。
2. **可变数据段长度**:CAN协议的数据段长度固定为0-8字节,而CANFD允许数据段长度从0-64字节,提高了数据传输的效率和多样性。
3. **报文格式**:CANFD报文分为标准帧和扩展帧两种格式,其中标准帧包含11位标识符(ID),扩展帧则包含29位ID,提供了更多的标识符空间。
4. **报文结构**:CANFD报文由帧起始、仲裁场、控制场、数据场、CRC(循环冗余校验)、ACK(确认)域和帧结束组成。其中,控制场包含了一个标志,表示报文是否使用CANFD模式。
5. **报文类型**:CANFD协议中的报文类型包括数据帧、远程帧、错误帧和过载帧。其中,错误帧用于检测和报告总线上的错误,过载帧用于同步网络上的节点。
6. **错误处理**:CANFD协议具有强大的错误检测和恢复机制,包括位错误、填充错误、CRC错误等,并且增加了总线负载上报,以便于监控网络健康状况。
7. **定时发送与实时更新**:CANFD设备支持定时发送功能,可以预先设定报文的发送时间和频率,同时支持实时更新,确保关键数据的及时传输。
8. **请求-应答机制**:CANFD网络设备通信协议中,认证数据包被分为请求和应答包,这种机制增强了网络的安全性和可靠性。
9. **扩展功能**:随着版本的升级,CANFD协议不断添加新的功能,如报文压缩传输、GPS数据包、动态配置请求等,以适应更多样化的应用场景。
10. **设备状态管理**:协议中包含了设备状态包,允许设备报告其当前的状态,便于网络管理和故障诊断。
CANFD协议通过提升通信速度和增强数据传输能力,为需要高速、高效通信的系统提供了优秀的解决方案。其丰富的报文格式、错误处理机制和不断演进的功能集,使其在各种领域中保持了高度的竞争力。
CANFD 网络设备通讯协议
CANFD 网络设备系列产品
©2019 Guangzhou ZHIYUAN Electronics Corp.,Ltd.
3
Technical Note
Bit4~7:保留
请求包数据区格式见表 1.14
应答包数据区格式见表 1.16
配置数据包
0x51
包内容为《CANFDNET 配置通讯协议》数据,即对配置协议的封装。
设备或上位机收到该类型的数据包后,可对数据包内容按照
《CANFDNET 配置通讯协议》解析;
包类型参数保留;
注:[1] 若为压缩,则数据长度为压缩后长度,解压后为 n 个 CAN/CANFD 报文;
[2] 超时时间与重发次数用应用协商定义。
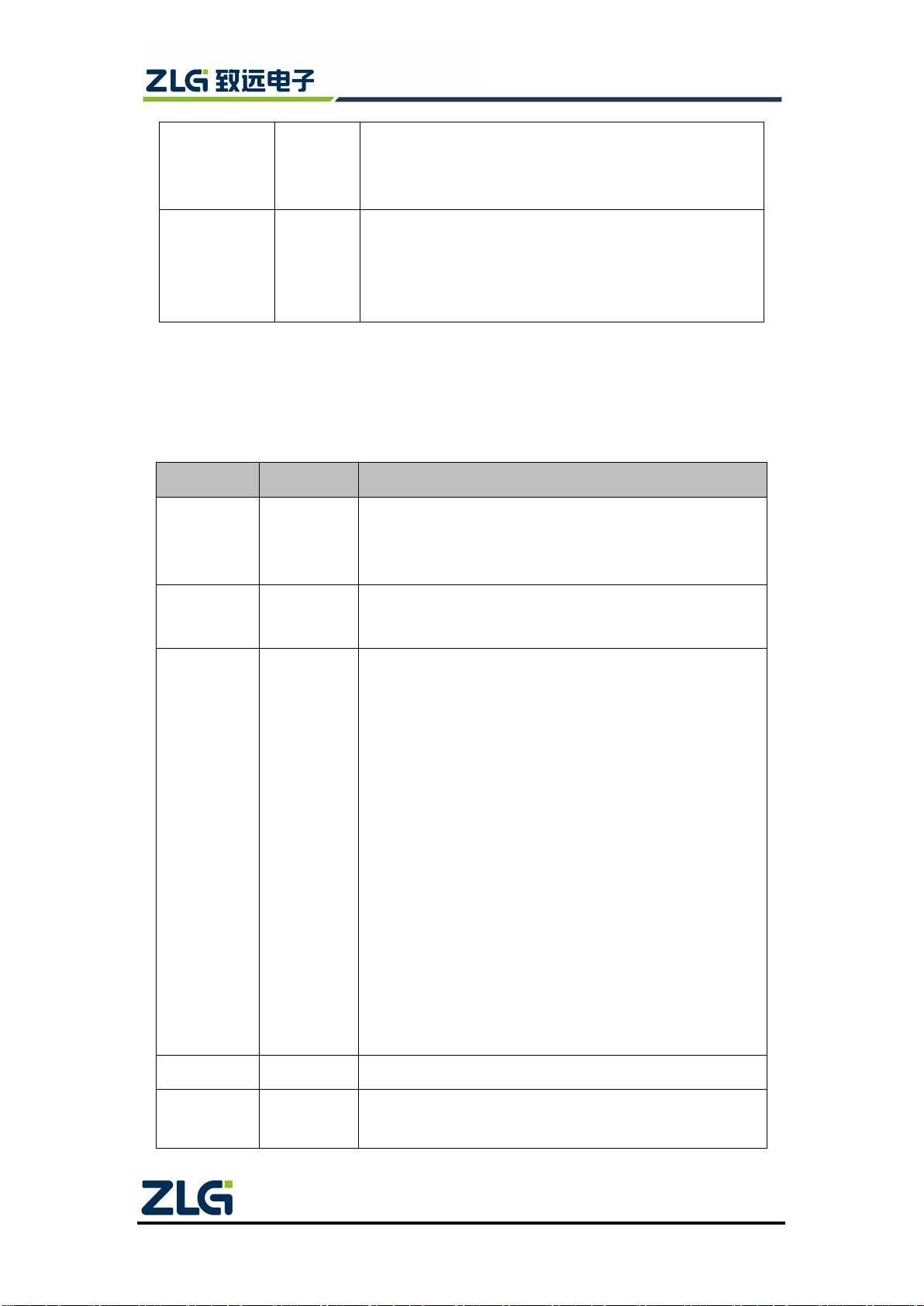
1.2 CAN(FD)报文格式定义
表 1.4 CAN/CAN FD 报文格式
参数
大小(Byte)
说明
时间戳
8
当前报文接收/发送时间,单位 us;
当发送报文时,报文信息中 SndDelay=1,则该参数最低 4 字节表示
发送后延时时间,单位 100us.
报文 ID
4
Bit0~28:报文 ID,标准帧为 11 位,扩展帧为 29 位;
Bit29~31:保留,为 0;
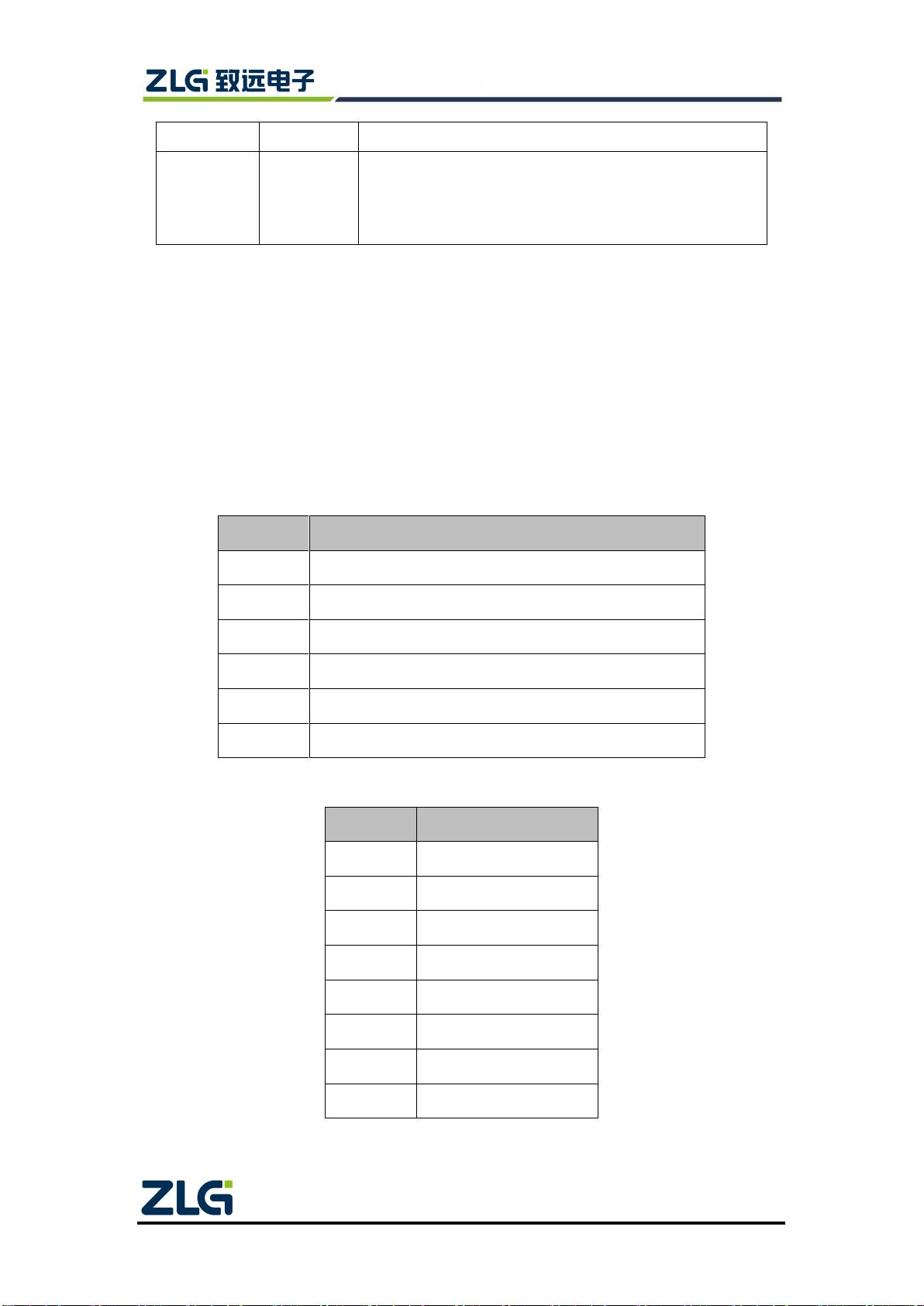
报文信息
2
报文标识:
[bit15:11]:保留,为 0;
[bit10] : SndDelay
[6]
,1-发送后延时,0-普通发送
[bit9] : ESI
[1]
,1-被动错误,0-主动错误;
[bit8] : BRS
[1]
,1-CANFD 加速,0-不加速(CANFD 有效);
[bit7] : ERR,1-错误报文
[2]
,0-正常报文(接收有效);
[bit6] : EXT,1-扩展帧,0-标准帧;
[bit5] : RTR
[3]
,1-远程帧,0-数据帧;
[bit4] : FD
[1]
, 1-CANFD,0-CAN;
[bit3] : ECHO
[4]
,1-发送回显,0-发送不回显
[bit2] : EchoFlag
[4]
,发送时该位为 0;接收时该位表示回显报
文标识,1-发送回显报文,0-普通报文;
[bit1:0] : 发送类型(仅发送有效,接收为 0);
0: 正常发送;1: 单次发送;2: 自发自收
报文通道
1
CAN(FD)通道,取值:0~设备通道数
数据长度
1
报文数据长度;取值如下:
CAN 报文: 0~8;
剩余32页未读,继续阅读
298 浏览量
点击了解资源详情
173 浏览量
2021-09-22 上传
122 浏览量
621 浏览量
167 浏览量
2018-08-16 上传
184 浏览量

卑微小城
- 粉丝: 9
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- SPI的定义.doc
- beginning-linux-programming.pdf
- C程序设计语言_第2版新版(清晰版)
- 基于DSP的AD频率变换的研究与实现
- 网络驱动程序设计指南
- 2007年Linux普及书籍从Windows转向Linux基础教程
- TOAD 快速入门 doc
- ATCOMMAND 命令大全
- Statspack-v3.0
- StartingStruts2online2.pdf
- Alfresco Enterprise Content Management Implementation.rar
- pb webservice
- 图书管理系统概要设计
- 教你制作widget
- 图书管理系统详细设计
- Java解惑-java初级知识分析
