RBF神经网络补偿的多传感器航迹融合技术
115 浏览量
更新于2024-09-01
1
收藏 321KB PDF 举报
"本文主要探讨了一种基于RBF神经网络补偿的多传感器航迹融合方法,旨在跟踪机动性目标。该方法在处理多传感器数据融合时,先利用线性卡尔曼滤波器处理各传感器的测量值,然后通过融合中心进行局部航迹融合。为减少共同过程噪声的影响,文章引入了径向基函数(RBF)神经网络,并采用无痕卡尔曼滤波器(UKF)优化神经网络权重。仿真实验显示,这种方法对于跟踪过程噪声较大的目标具有显著效果,即使过程噪声变化,其有效性依然保持,因此在实际应用中具有广阔前景。"
详细说明:
1. **多传感器航迹融合**:在多传感器系统中,航迹融合是一种将不同传感器估计的目标状态集成,以获得更准确目标状态的方法。相比于测量融合,航迹融合在处理不同类型传感器数据和增强系统鲁棒性方面更具优势。
2. **RBF神经网络补偿**:径向基函数神经网络(Radial Basis Function Neural Network, RBFNN)因其在非线性映射中的高效性和准确性而被应用于此处,用于补偿因共同过程噪声引起的融合估计误差。RBF神经网络以其独特的径向基函数作为激活函数,可以有效处理非线性问题。
3. **线性卡尔曼滤波器**:在处理每个传感器的测量值时,线性卡尔曼滤波器被用来预处理数据,提供局部航迹的初始估计。卡尔曼滤波是一种有效的递归滤波方法,能在线性高斯噪声环境下最小化预测误差。
4. **无痕卡尔曼滤波(UKF)**:在优化神经网络权重时,无痕卡尔曼滤波器被采用。相比传统的卡尔曼滤波,UKF提供了更好的非线性处理能力,减少了计算复杂度,且在某些情况下能够提供更精确的估计。
5. **航迹关联与融合**:在融合中心,来自不同传感器的航迹进行关联和融合,以消除传感器间的数据冲突和提高目标状态的精度。这一过程涉及到对不同传感器估计的加权和处理,以达到最优估计。
6. **问题挑战与现有方法比较**:文中提到的简单融合算法(SF)和加权方差融合方法(WCF)在处理目标机动和非正定协方差时存在局限性。SF假设不同航迹的估计误差无关,而WCF虽然在正定情况下表现较好,但在非正定情况下性能下降。自适应航迹融合方法试图通过决策逻辑改善这种情况,但仍面临过程噪声的问题。
7. **方法有效性**:提出的RBF神经网络补偿融合方法在仿真中证明了其对具有过程噪声目标的有效跟踪能力,即使在噪声变化的条件下也能保持良好的性能,这使得该方法在实际应用中具有很大的潜力。
总结,本文提出的基于RBF神经网络补偿的多传感器航迹融合方法,通过结合线性卡尔曼滤波、无痕卡尔曼滤波和RBF神经网络,实现了对机动目标的高效、准确跟踪,弥补了现有融合方法的不足,展示了在实际应用中的价值。
基于神经网络补偿的多传感器航迹融合基于神经网络补偿的多传感器航迹融合
本文提出一种新的基于RBF神经网络补偿的航迹融合方法,用以跟踪具有机动性的目标。
摘要摘要:针对多传感器环境的条件提出了一种基于神经网络补偿的航迹融合方法。各传感器的测量值用线性卡尔曼滤波器进行处
理并将获得的局部航迹传送到融合中心。首先对局部航迹进行融合,然后引入神经网络来减少因共同过程噪声而导致的融合估
计误差,其中神经网络采用DanSi2mon提出的网络结构,并对神经网络权值的优化采用无痕卡尔曼滤波(UKF)。仿真结果表
明,这种融合方法对跟踪具有过程噪声的目标非常有效,而且过程噪声发生变化时该方法仍是有效的,从而使得它在很多实际
应用中具有潜在的价值。
关键词关键词:航迹融合;多传感器;径向基函数神经网络;无痕卡尔曼滤波
近年来随着多传感器设备的广泛使用,多传感器融合或数据融合已经受到越来越多的关注。目前,多传感器数据融合主要有两
种方法:测量融合和航迹融合。测量融合是将传感器的测量值进行组合并获得目标状态向量的最优估计,这种方法的主要缺陷
在于它需要传感器的测量值并且集中式方法缺乏鲁棒性。另外,传感器的测量值可能属于不同类型(比如红外,雷达等),而要
同时处理这些不同类型的测量值则是非常困难的。因此,在很多的实际应用场合均使用航迹融合方法,每一个传感器都应用一
个估计器来获取目标的状态向量及其协方差矩阵,并将其通过数据链传送到融合中心,在融合中心进行航迹关联和航迹融合从
而获得更精确的目标状态向量。
在航迹融合方法里,Singer等首先提出了简单融合算法(SF)。它假定来自不同传感器的同一目标的航迹估计误差是不相关的,
而实际上,这种假设:不成立,因为对各个估计器的滤波动态来说,由目标机动导致的过程噪声是共同的。为了消除不同航迹
间的关联,Bar-Shalom等提出了加权方差融合方法(WCF),结果表明在协方差为正定的情况下,这种融合方法相对于简单融
合方法的性能有很大幅度的提高,但是在非正定的情况下,加权方差融合方法的性能却下降了,甚至比简单融合方法还要差,
另外,对交互协方差的计算也非常复杂。为了减少计算负担,Celine提出了一种自适应航迹融合方法。这种方法的要点在于它
有一个决策逻辑,即通过距离矩阵和门限的比较来选择简单融合或加权方差融合,以获得全局估计。但由于过程噪声的存在,
大多数情况下仍然需要使用加权方差融合方法,无法避免计算交互协方差。稳定状态下交互式协方差的解析解可通过离散李亚
普诺夫方程来求解,Saha通过引入双线性变换转化交互式协方差矩阵方程并通过积分求解而大大降低了计算负担。但是这些
方法对于二维状态向量的融合是适合的,对于更复杂或更高维的航迹融合却不适合。
本文针对2条航迹融合的问题提出了一种基于神经网络补偿的航迹融合方法。该方法不直接计算交互式协方差,而是补偿因交
互式协方差而导致的融合误差。并通过跟踪实例,对所提出方法的可行性进行了验证。
数学模型数学模型
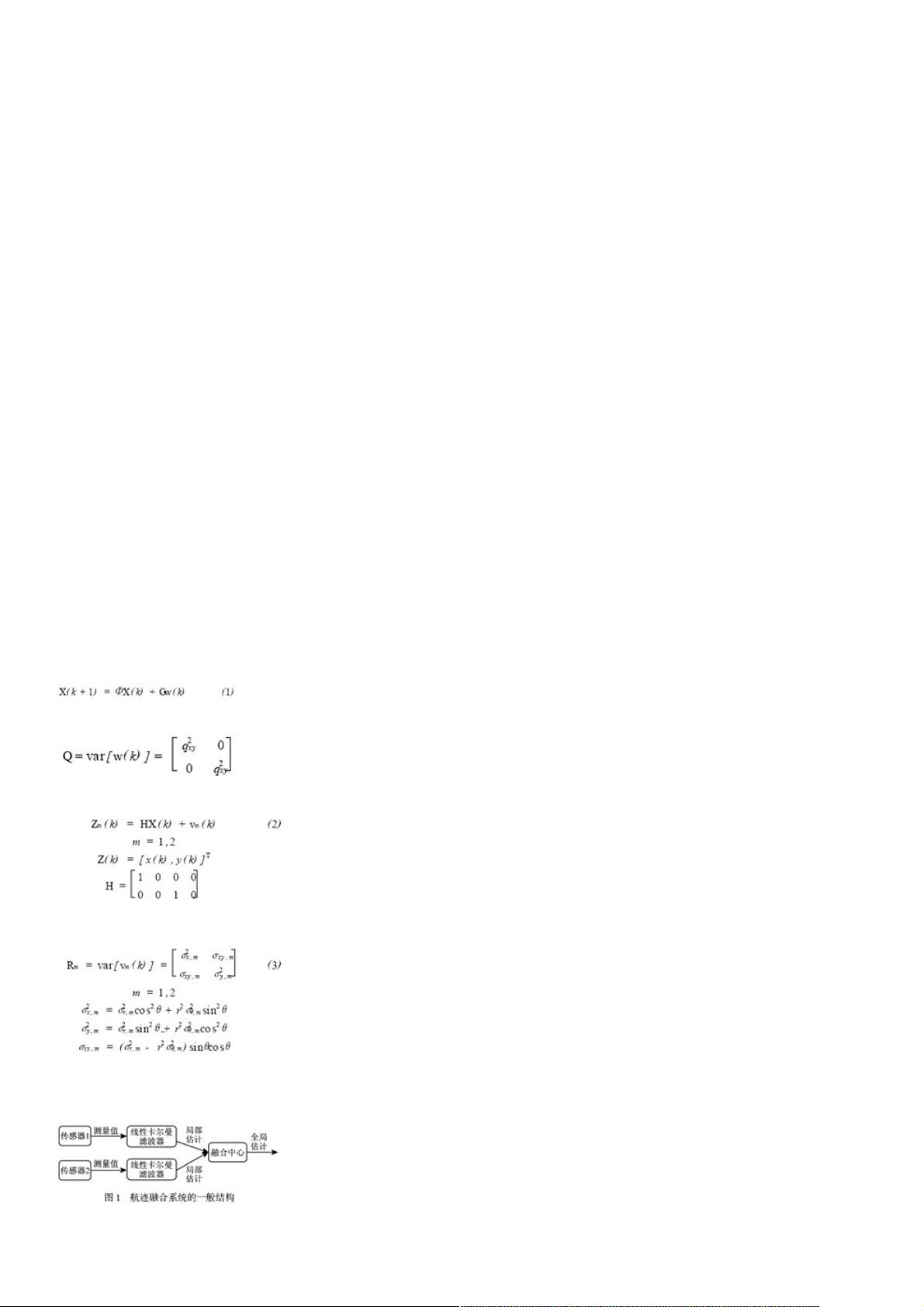
所跟踪目标的动态模型为
式中X(k)=[x(k)x(k)y(k)y(k)]T为状态向量Φ,G分别为状态矩阵和转移矩阵;输入噪声w(k)为零均值高斯白噪声,其方差
。观测值为距离r和角度θ,它们的标准方差分别表示为σr和σθ,将其转化到笛卡尔坐标系
下,x=rcosθ和y=rsinθ,这时测量方程为
式中,vm(k)为笛卡尔坐标系下的测量噪声,它与过程噪声w(k)是相互独立的,假定其为零均值高斯白噪声且其方差矩阵为:
融合系统结构如图1所示。2个传感器跟踪同一目标,融合中心的目的在于将2个跟踪器的输出进行融合而得到更精确的估计
值,本文不考虑配准和航迹关联问题,并且假定整个系统是可观测的。
目标状态估计可从以下的卡尔曼滤波方程得出:
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-02 上传
1017 浏览量
120 浏览量
2022-12-15 上传
2023-08-21 上传
2012-05-19 上传
106 浏览量
135 浏览量
点击了解资源详情

weixin_38622849
- 粉丝: 3
- 资源: 958
 我的内容管理
展开
我的内容管理
展开







最新资源
- 代码高尔夫球
- fileor:文件组织框架
- SRB2-Editor:SRB2的最佳技巧
- ocrsdk.com:ABBYY Cloud OCR SDK
- External-links-crx插件
- 完整版谁要的自动点击QQ查找按钮例程.rar
- 两点之间的圆柱:MATLAB函数圆柱的推广-matlab开发
- PURC Organics: Haircare Products-crx插件
- 专题页面雪花啤酒摄影大赛专题页面模板
- scholar-bot:一个不协调的机器人来组织东西
- 完整版谁要的自动点击QQ查找按钮例程.e.rar
- Portfolio2:个人展示2
- 图片匹配功能:匹配作为参数给出的两张图片。-matlab开发
- guessmynumber
- 完整版谁的窗口也挡不了我的窗口(窗口永远最前).rar
- 哈达德
