无人机飞控系统仿真:常规PID vs 智能PID控制器
"这篇硕士论文主要探讨了无人机飞控系统的仿真研究,重点在于基于常规PID和智能PID控制策略的飞行控制律设计。论文首先建立了无人机的六自由度数学模型,并进行了线性化处理。接着,介绍了PID控制器参数整定方法和智能PID控制的基本原理。然后,分别使用常规PID和智能PID设计了纵向与横侧向控制系统,并通过大量仿真对不同空域的状态点进行了分析。仿真结果显示,常规PID控制器在大多数情况下能够满足需求,而智能PID控制器则具有更好的鲁棒性,能适应更广泛的状态点。关键词包括:无人机、常规PID、智能PID、飞行控制律、俯仰角、滚转角和仿真。"
该论文涉及的知识点主要包括:
1. **无人机飞控系统**:无人机的飞行控制系统是确保其稳定飞行和执行任务的关键组成部分,它包括姿态控制、航向控制、高度控制等。
2. **六自由度数学模型**:无人机的六自由度模型描述了其在三维空间中的位置和姿态变化,包括沿三个正交轴的平移(俯仰、偏航、滚转)和绕这三个轴的旋转。
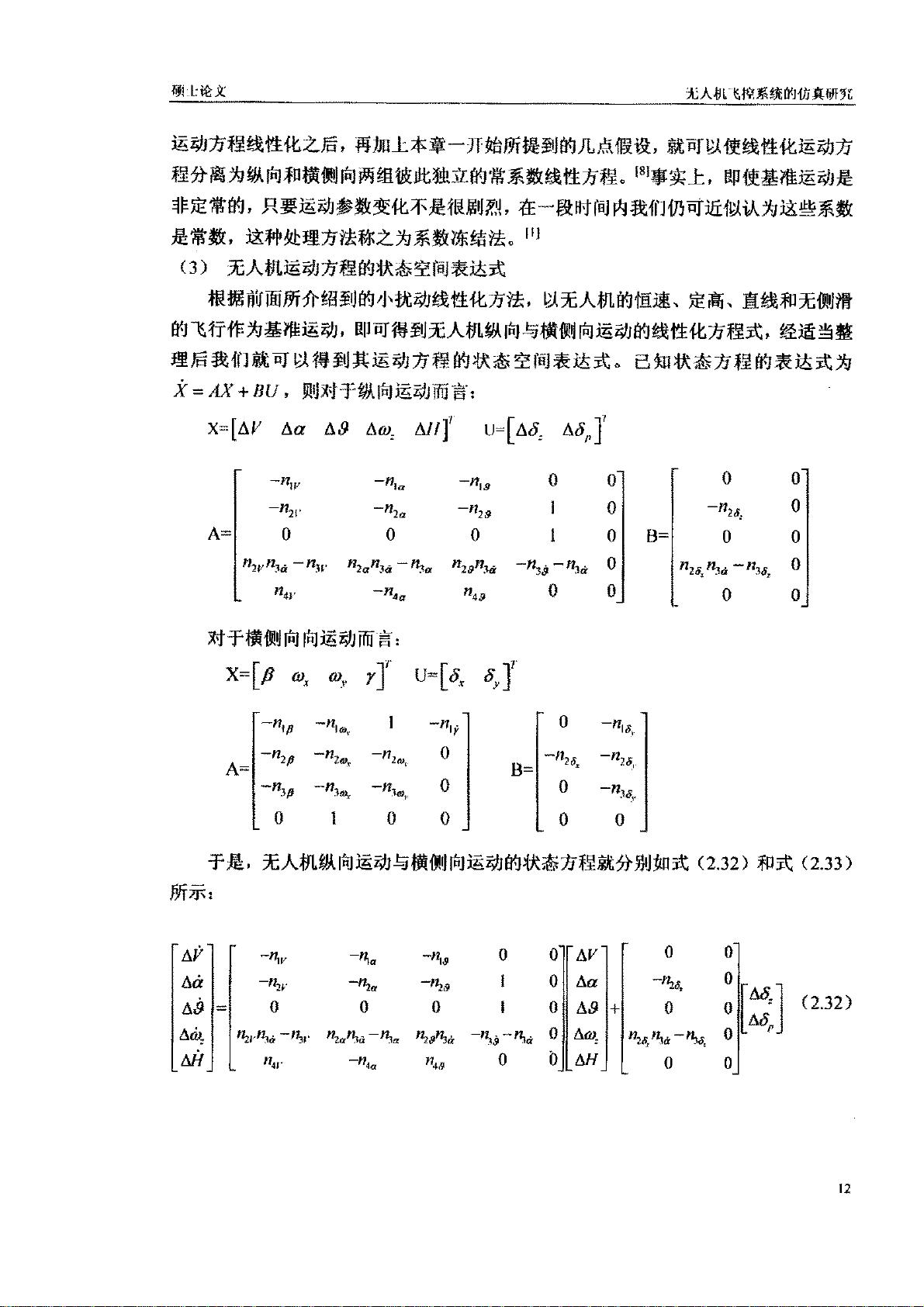
3. **线性化方法**:小扰动线性化和系数冻结法用于将非线性的动态系统简化为线性方程,便于分析和控制设计。
4. **PID控制器**:比例-积分-微分控制器是一种广泛应用的反馈控制算法,能有效补偿系统误差,实现精确控制。
5. **智能PID控制**:结合了传统PID控制和人工智能方法,如神经网络、模糊逻辑等,增强了控制器的自适应能力和鲁棒性。
6. **参数整定**:调整PID控制器的参数以优化其性能,通常包括比例(P)、积分(I)和微分(D)增益的选择。
7. **仿真研究**:通过计算机模拟真实环境,测试控制策略在各种条件下的性能,是控制器设计的重要步骤。
8. **飞行控制律**:定义了飞行器如何响应控制输入,以达到期望的飞行性能,包括对俯仰角和滚转角的控制。
9. **鲁棒性**:控制器的鲁棒性是指其在面对系统不确定性或外部干扰时仍能保持稳定性能的能力。
10. **状态点**:在仿真中,每个状态点代表特定的高度、速度、角度等飞行参数组合,通过对多种状态点的仿真,可以全面评估控制器的性能。
通过以上知识点的深入研究,该论文旨在提高无人机在复杂环境下的飞行控制性能,尤其是通过智能PID控制提升控制系统的适应性和稳定性。

气
气
V
.
︐
了二
笼
1
!
兰
"
笠
"
班
o
︐
^
d
从
一
无
气
气
d
t
翻
一
d
t
d
L
-
政
d
H
-
d
t
d
Z
一
故
剩余68页未读,继续阅读
2023-09-08 上传
108 浏览量
2021-04-28 上传
122 浏览量

shuisidemao
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 极速PE u盘启动盘制作工具(xp内核) v6.1
- ember-cli-webcomponents-bundler:使用ES6模块捆绑Web组件
- 行业文档-设计装置-阶梯式弧形看台现浇装饰板的模板支撑体系及构建方法.zip
- Imperial Realms Standard Client-开源
- 2020TI杯模拟电子系统邀请赛现场u盘内容 包络电源
- Racer对Emacs的支持—自动完成(另请参阅公司和自动完成)-Rust开发
- gpsDataLogger-开源
- python 碎图合成脚本 附带说明文档
- 领域自适应文本挖掘工具(新词发现、情感分析、实体链接等),基于少量种子词和背景知识
- scripts:波格
- 行业文档-设计装置-一种平台.zip
- FJSP算例转化程序,需要指定文件位置带后缀的,xls,除了MK算例不能转化外,其他的算例都能转化
- 算法:算法문제풀이
- jql-JSON查询语言CLI工具-Rust开发
- Mobile_App_Look-Feel
- PYNQ-Z1中文入门指导手册及示例程序
