KUKA机器人逻辑编程指南
"KUKA机械人的逻辑编程技术主要包括输入输出设置、逻辑指令的使用,如时间等待功能和信号等待功能,这些使得机器人能与外围设备有效地通讯和协调工作。"
在KUKA机械人的逻辑编程中,输入输出(I/O)的设置是至关重要的,它们确保了机器人能够与外部设备,如工具或传感器进行通信。输出($OUT[1]$到$OUT[4096]$)和输入($IN[1]$到$IN[4096]$)的设定允许数据的传输,比如$IN[1025]$表示一个激活的信号,而$IN[1026]$表示一个非激活的信号。这样的设置使得机器人可以根据外部设备的状态来调整其行为。
逻辑指令的运用丰富了机器人的控制策略。时间等待功能(WAIT)允许程序在执行到特定点时暂停指定的时间,例如,在到达P2点后,使用WAIT指令可以让机器人停留1秒(如示例所示,WAIT Time=1sec)。等待时间可以精确到秒,使得程序的流程控制更为灵活。
信号等待功能(WAITFOR)则提供了更复杂的逻辑判断。它可以等待一个或多个输入信号满足特定条件,甚至可以进行布尔运算,例如等待(IN1) AND (IN2)或(IN1 OR IN2 OR IN3) AND (NOT OUT1 OR OUT2) OR (NOT IN4)。这使得机器人能够根据外部信号的状态变化做出响应,实现复杂的逻辑操作。
此外,WAITFOR指令还支持内部逻辑运算和外部逻辑运算的组合,以及布尔表达式的取反操作,增强了逻辑判断的多样性。用户可以根据实际需求构建复杂的逻辑表达式,以实现更精细的控制逻辑。
KUKA机械人的逻辑编程能力使其能够适应各种工业应用场景,通过灵活的I/O配置和强大的逻辑指令,实现与环境的智能交互,确保自动化流程的高效和准确。
© Copyright by KUKA Roboter GmbH College
01/2006 6
mp2_logic_en.ppt
1 2 3 4 5 6
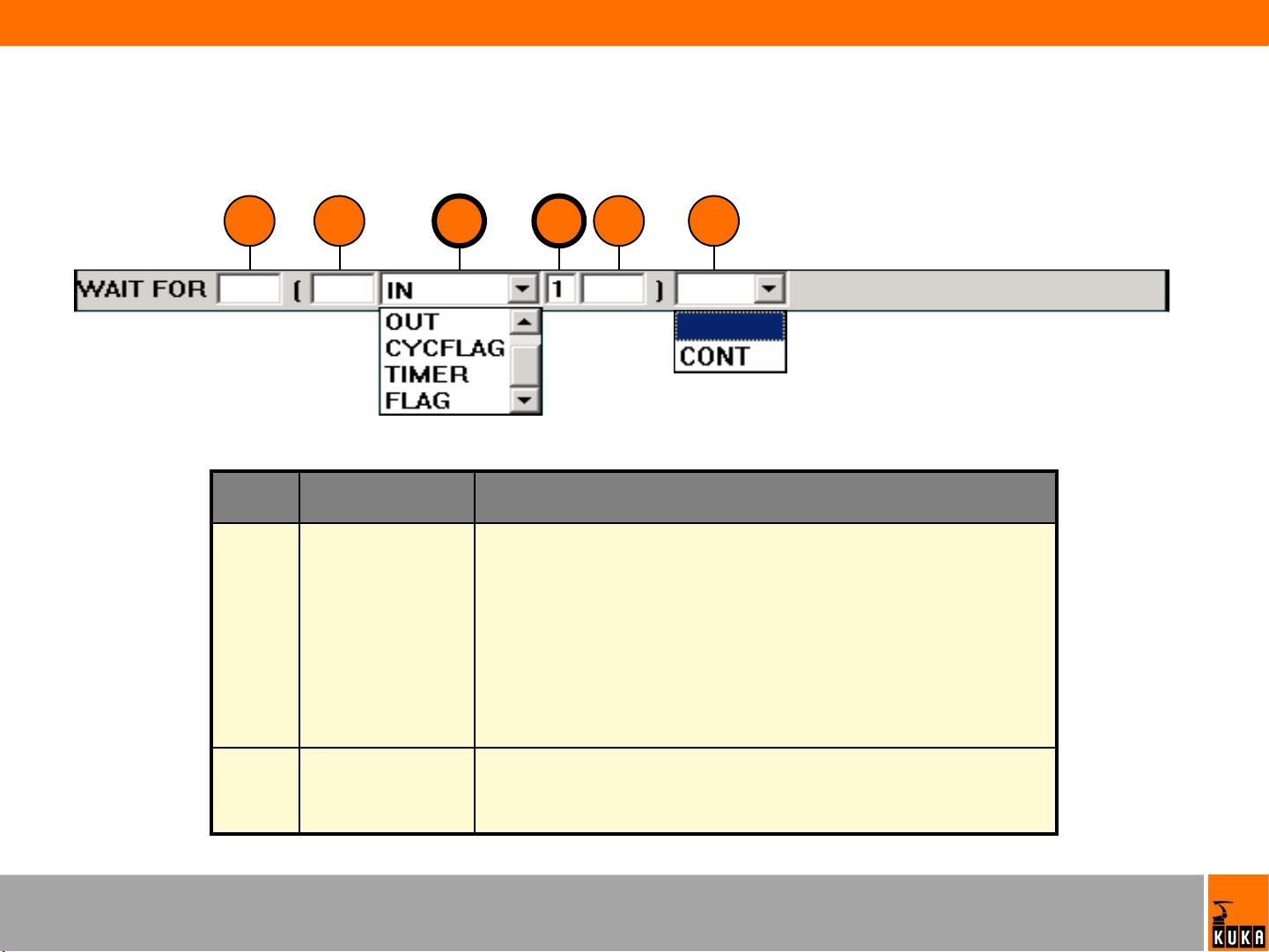
等待信号功能指令 (WAIT FOR)
如果“ WAIT FOR” 指令被选择,那么以下参数可以被设置:
输入 / 输出,标志位。计时器的编号1- 4096
4
输入 / 输出,标志位。计时器,用户自定义的
名字
IN, OUT,
TIMER,
FLAG,
CYCFLAG,
user
variable
3
RemarksValuesBox
剩余26页未读,继续阅读
2018-10-24 上传
2021-11-17 上传
2017-08-02 上传
2017-05-16 上传
2023-03-03 上传
2023-04-18 上传
2015-08-28 上传
2019-04-12 上传

kqyabc
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
