"蘇黎世聯邦理工學院機器人技術講義:動力學控制與逆向運動解matlab程序碼"
需积分: 0 41 浏览量
更新于2024-03-22
收藏 1.2MB PDF 举报
The Robotics Technology Lecture Notes from the Swiss Federal Institute of Technology in Zurich cover topics such as kinematics, dynamics, inverse kinematics, and MATLAB code for motion analysis. These lecture notes are designed for engineers who are interested in robotics technology.
The kinematics section covers the study of motion, including the position and orientation of robotic systems. It explains how to represent positions using Cartesian coordinates and Euler angles, and how to transform between Euler angles and rotation matrices. This section provides a foundation for understanding the movement of robots in various environments.
The dynamics section delves into the forces and torques that govern the motion of robotic systems. It includes topics such as joint-space dynamic control, where the focus is on controlling the motion of individual joints, and task-space dynamic control, which looks at controlling the overall motion of the robot. The lecture notes also discuss inverse dynamics for floating-base systems, such as humanoid robots and legged robots, and quasi-static control for robots like robot dogs that require balance control.
The MATLAB code provided in the lecture notes allows engineers to implement the concepts discussed in the lectures and analyze the motion of robotic systems. This hands-on approach helps reinforce the theoretical concepts and provides practical experience in robotics technology.
Overall, the Robotics Technology Lecture Notes from the Swiss Federal Institute of Technology in Zurich offer a comprehensive overview of kinematics, dynamics, and control in robotics. Whether you are a beginner or an experienced engineer in the field, these lecture notes provide valuable insights into the world of robotics technology.
e
A
x
e
A
y
e
A
z
e
B
x
e
B
y
e
B
z
v
u
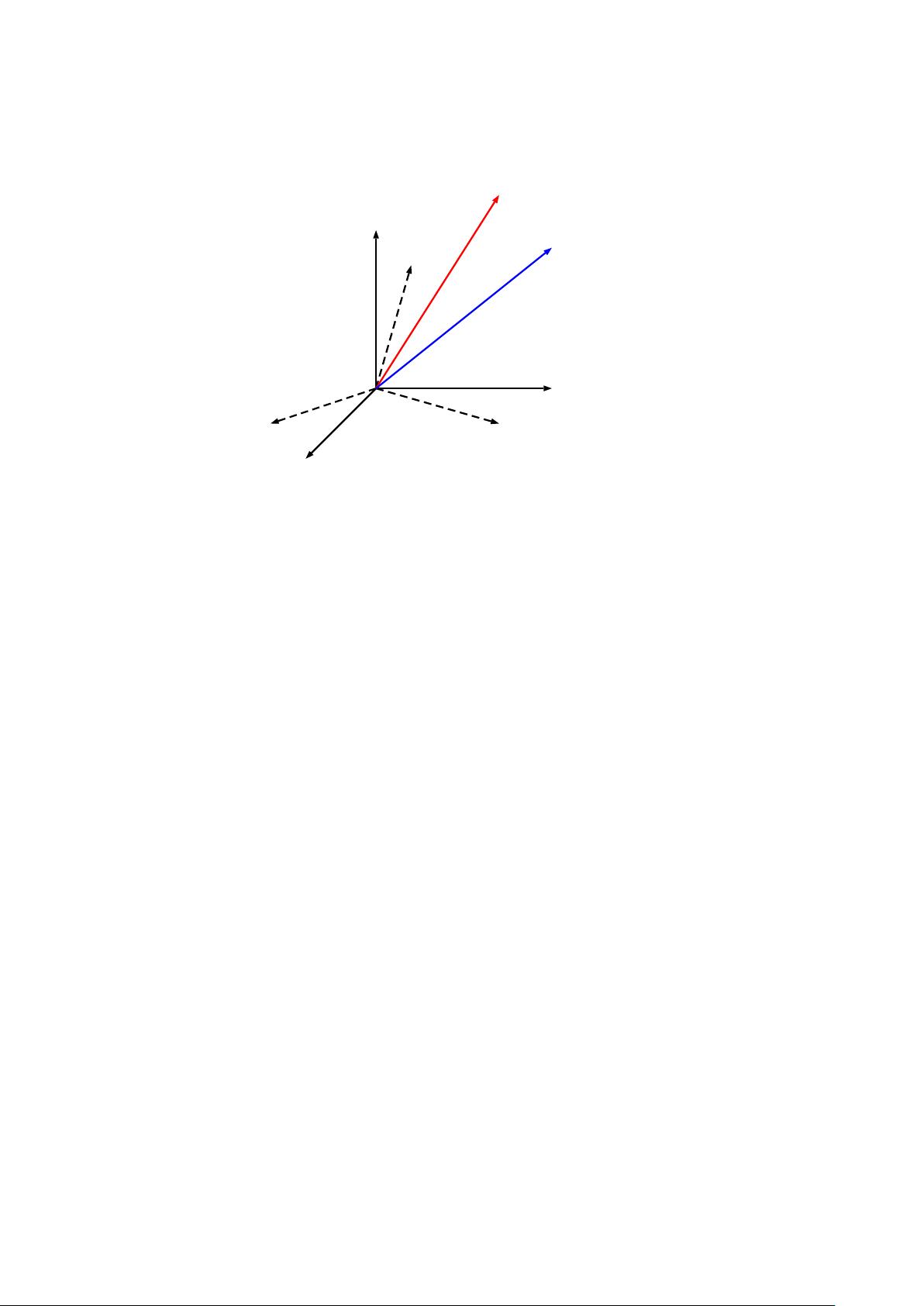
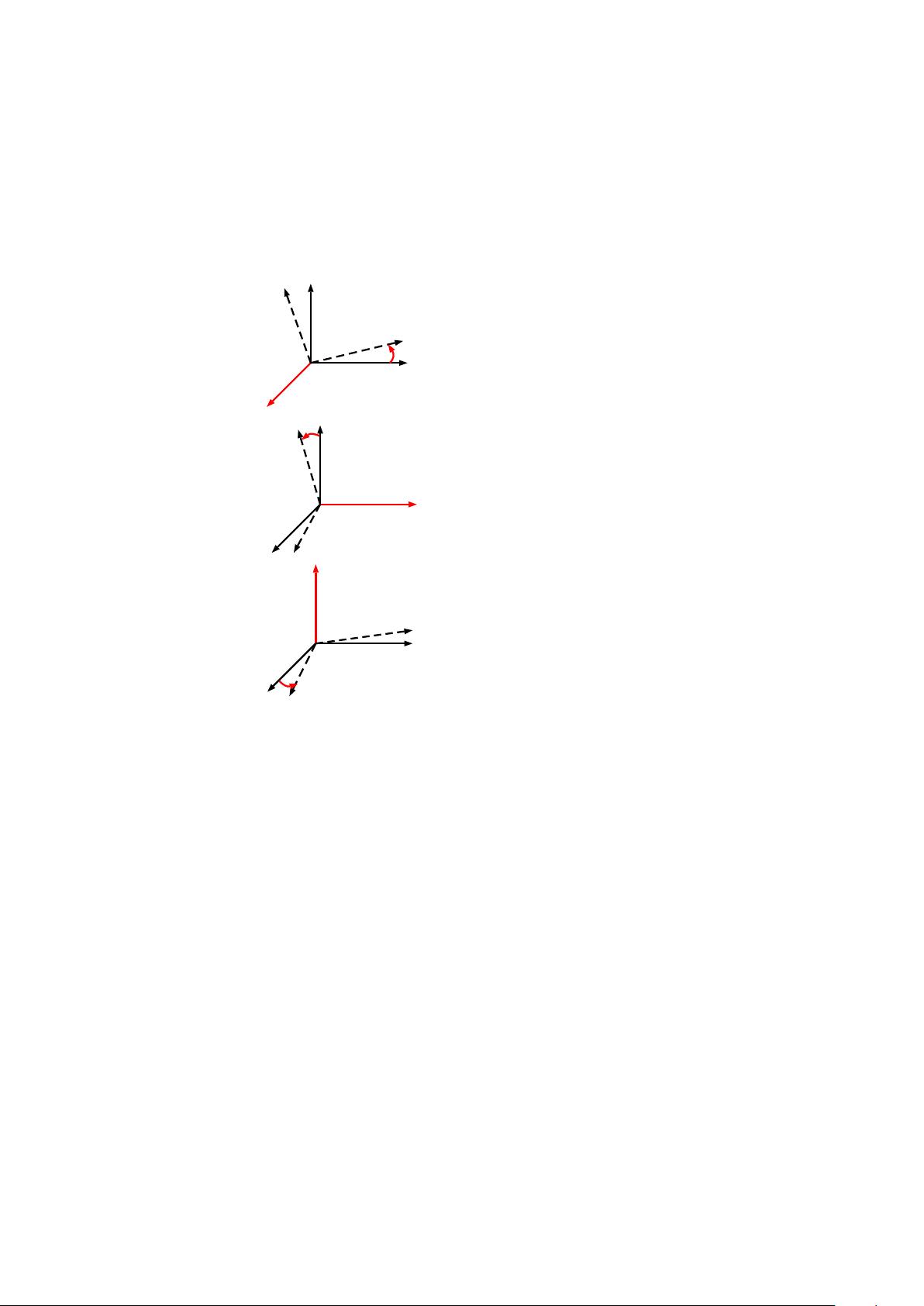
Figure 2.3: A passive rotation can be interpreted as the rotation of a coordinate frame,
and an active rotation as the rotation of an object u which yields v.
2.4.2 Active vs. Passive Rotation
Rotations can have two different interpretations, which lead to the definition of the
so-called active and passive rotations.
Passive Rotation
Passive rotations, also known as rotation transformations, correspond to a mapping
between coordinate frames as shown in (2.21). A passive rotation C
AB
maps the same
object u from frame B to frame A:
A
u = C
AB
·
B
u (2.24)
Active Rotation
An active rotation, often indicated with a 3 × 3 matrix R, is an operator that rotates a
vector
A
u to a vector
A
v in the same reference frame A:
A
v = R ·
A
u. (2.25)
Active rotations are not very relevant in robot dynamics and are hence not used in the
course of this lecture.
11


剩余99页未读,继续阅读
2022-07-22 上传
2018-04-09 上传
2022-06-10 上传
2021-05-08 上传
2020-05-07 上传
2021-05-22 上传
2021-03-08 上传
2021-05-21 上传
2021-04-09 上传

qoo12
- 粉丝: 1
- 资源: 86
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
